

1. Introduction
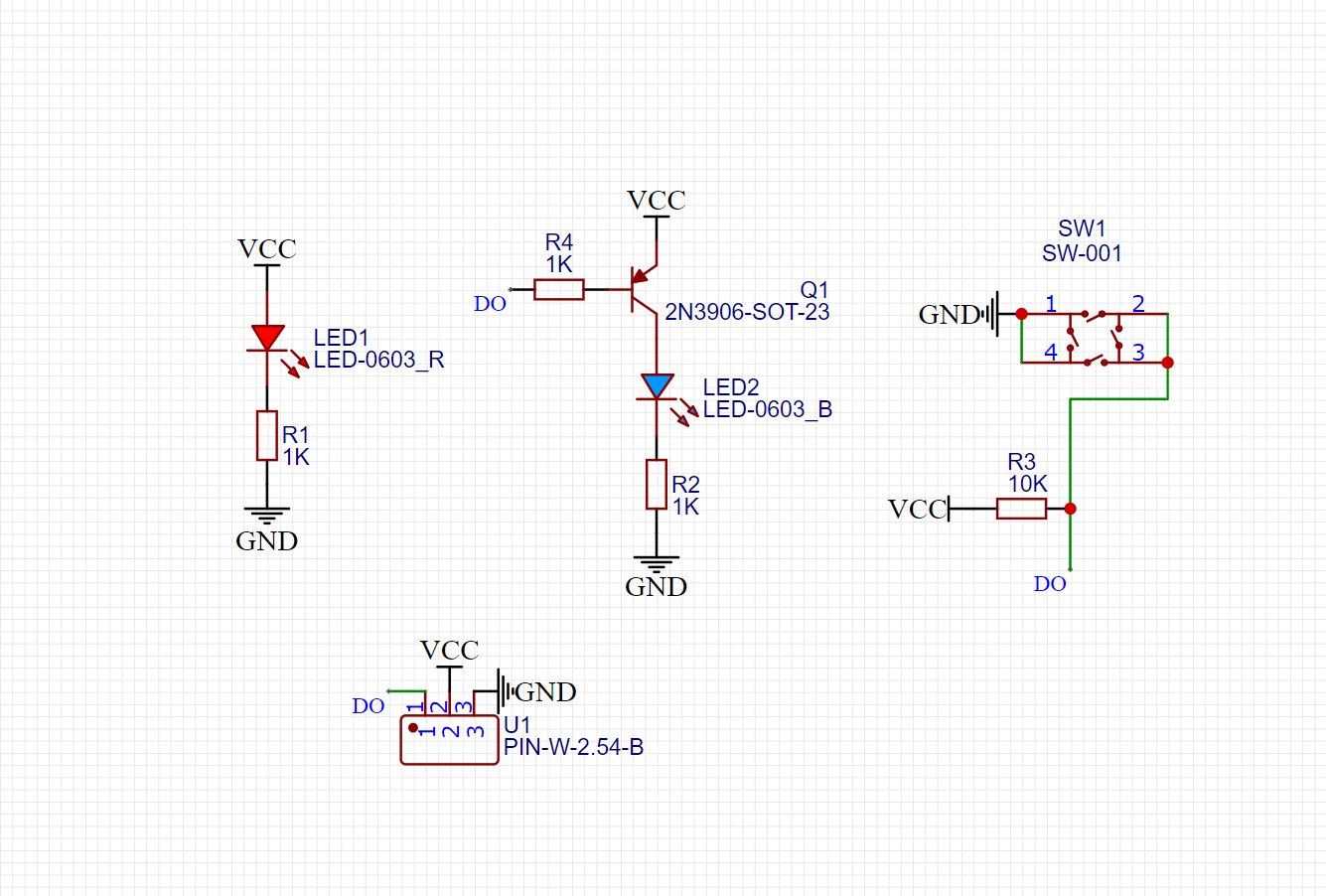
2. Schematic
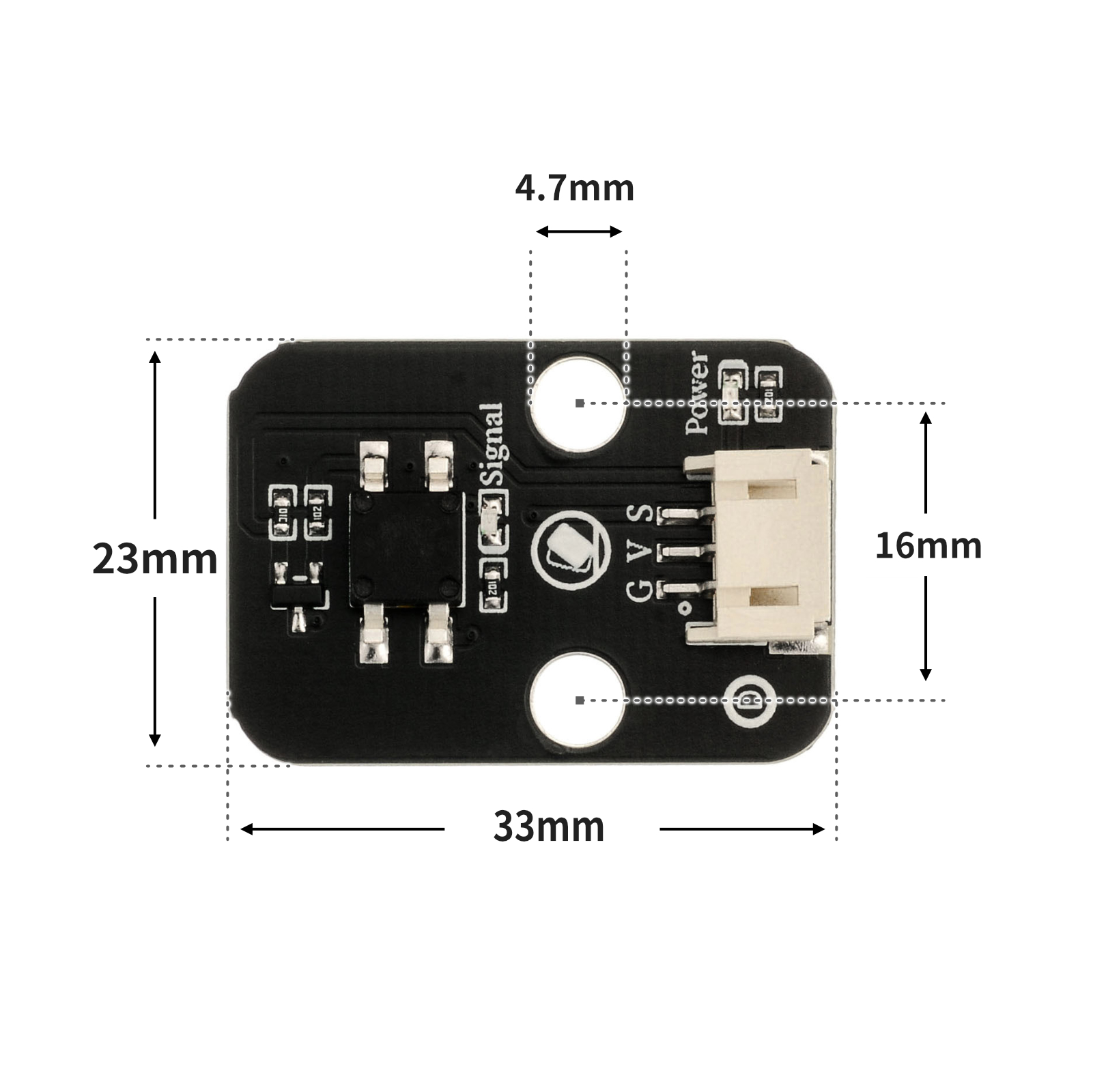
Module Parameters
Pin Name | description |
|---|---|
G | GND (Negative Power Input) |
V | VCC (Positive Power Input) |
S | Digital Signal Pin |
Power Supply Voltage: 3.3V / 5V
Connection Method: PH2.0 Terminal Wire
Installation Method: Double Screw Fixed
4, Circuit Board Size
5 of Arduino IDE example program
Arduino UNO Example (for Mixly IDE, Arduino IDE):
int value = 0;
void setup(){
Serial.begin(9600);
pinMode(4, INPUT);
pinMode(6, OUTPUT);
}
void loop(){
value = digitalRead(4);
if (value == 0) {
digitalWrite(6,HIGH);
} else {
digitalWrite(6,LOW);
}
delay(100);
Serial.println(value);
}ESP32 Python Example (for Mixly IDE / Micskit)
(Choose the Python ESP32 [ESP32 Generic(4MB)] to switch to code mode upload):
mport machine
import time
pin2 = machine.Pin(2, machine.Pin.IN)
pin4 = machine.Pin(4, machine.Pin.OUT)
while True:
if pin2.value() == 0:
pin4.value(1)
else:
pin4.value(0)
time.sleep_ms(500)
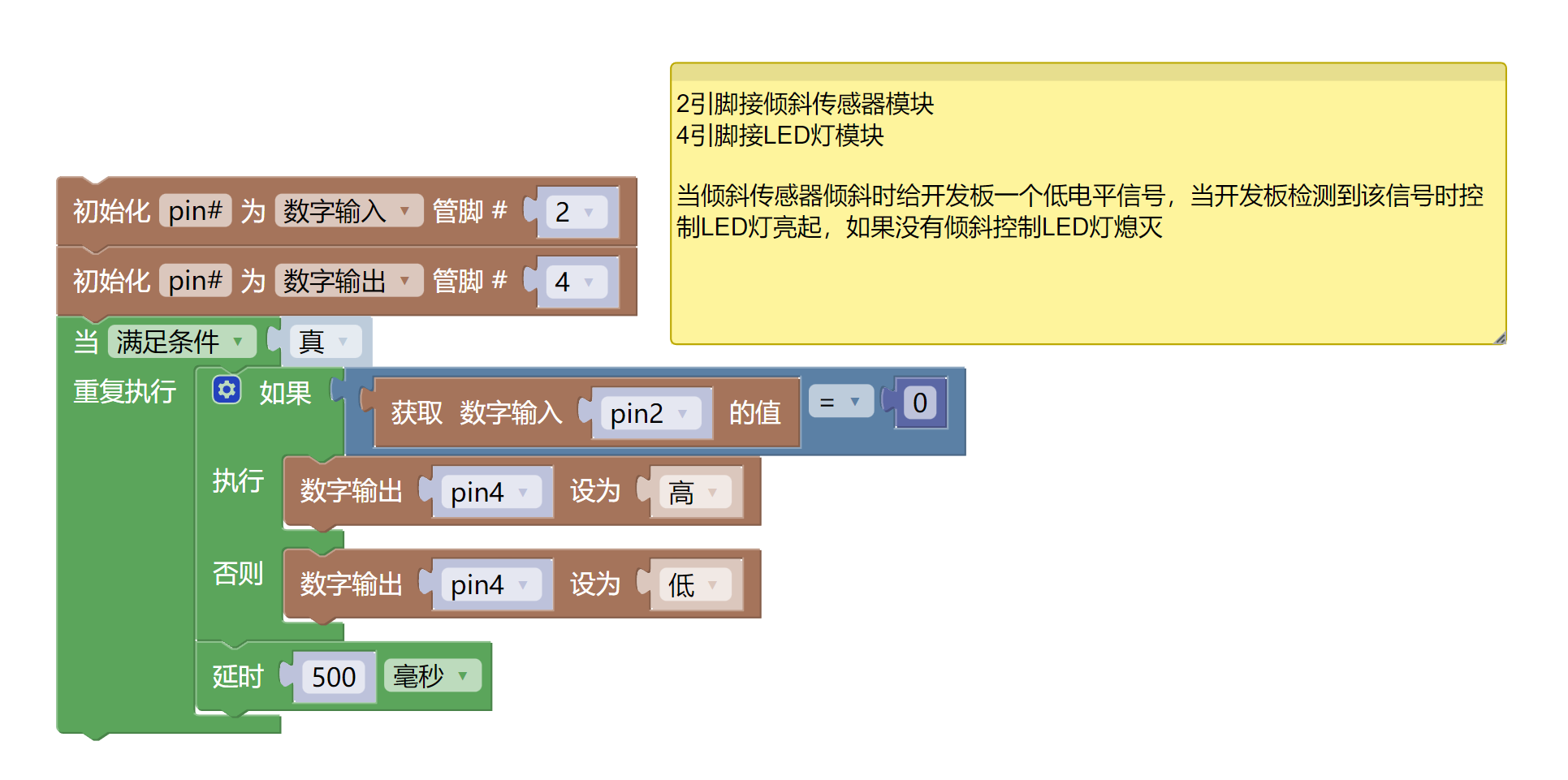
6, Miciqi Mixly Example Program (Graphical Language)
Example program (UNO development board):Click to download
ESP32 Python Graphical Example Program:Click to download
7, Test Environment Setup
Arduino UNO Test Environment Setup
Prepare Components:
HELLO STEM UNO R3 PRO DEVELOPMENT BOARD *1
UNO-R3 P Expansion Board *1
USB TYPE-C DATA CABLE *1
LED module (HS-F08L) *1
Omnidirectional Tilt Sensor Module (HS-S27L) *1
PH2.0 dual-end terminal line *2
Circuit wiring diagram:
ESP32 Python test environment setup
8. Video tutorial
Arduino UNO video tutorial:Click to view
ESP32 Python Video Tutorial:
9. Test conclusion
Arduino UNO Test Conclusion:
ESP32 Python test conclusion: