1. Introduction
The heart rate sensor is an electronic device used to monitor the frequency and rhythm of heartbeats, widely used in fields such as healthcare, sports fitness, and smart wearables.
2. Schematic
HS-S70P Heart Rate Sensor SchematicClick to view
Module Parameters
Pin Name | description |
|---|---|
GND | GND (Negative Power Input) |
VCC | VCC (Positive Power Input) |
A | IIC Data Transmission Pin |
L | I2C communication clock pin |
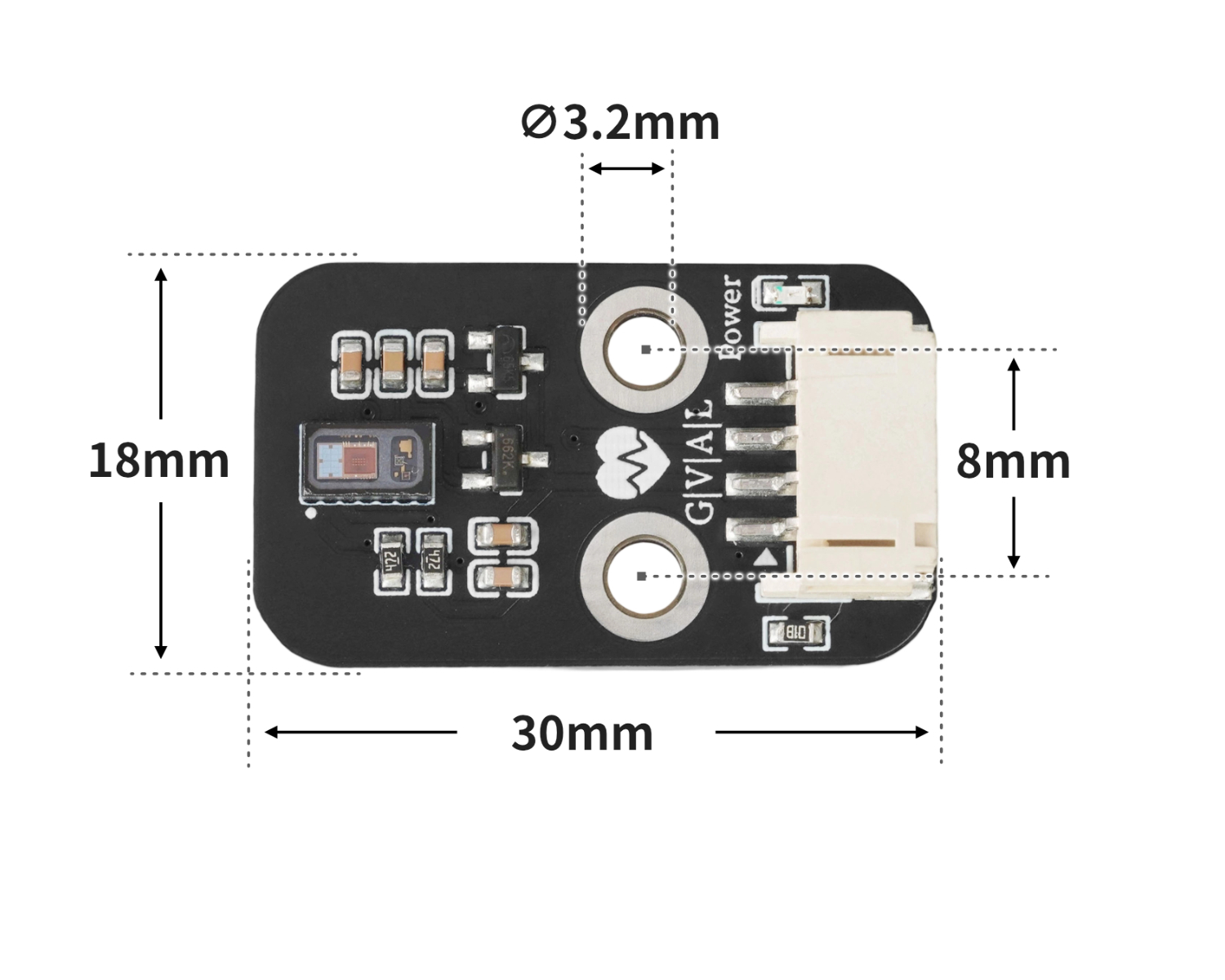
Power supply voltage: 3.3V - 5V
Connection method: PH2.0 4P terminal wire
Installation method: Screw fixed
4, Circuit Board Size
5 of Arduino IDE example program
Attention: If prompted with an error message about the library file during program upload, please import the library file first!
Arduino IDE Library Download and Import Tutorial:Click to view
Example program (UNO development board):
#include <Wire.h>
#include "MAX30105.h"
#include "heartRate.h"
MAX30105 particleSensor;
const byte RATE_SIZE = 4; //Increase this for more averaging. 4 is good.
byte rates[RATE_SIZE]; //Array of heart rates
byte rateSpot = 0;
long lastBeat = 0; //Time at which the last beat occurred
float beatsPerMinute;
int Bpm_value;
void setup(){
Serial.begin(9600);
particleSensor.begin(Wire, I2C_SPEED_FAST);
particleSensor.setup(); //Configure sensor with default settings
particleSensor.setPulseAmplitudeRed(0x0A); //Turn Red LED to low to indicate sensor is running
particleSensor.setPulseAmplitudeGreen(0); //Turn off Green LED
}
void loop(){
long irValue = particleSensor.getIR();
if (checkForBeat(irValue) == true)
{
//We sensed a beat!
long delta = millis() - lastBeat;
lastBeat = millis();
beatsPerMinute = 60 / (delta / 1000.0);
if (beatsPerMinute < 255 && beatsPerMinute > 20)
{
rates[rateSpot++] = (byte)beatsPerMinute; //Store this reading in the array
rateSpot %= RATE_SIZE; //Wrap variable
//Take average of readings
Bpm_value = 0;
for (byte x = 0 ; x < RATE_SIZE ; x++)
Bpm_value += rates[x];
Bpm_value /= RATE_SIZE;
}
}
Serial.print("Bpm_value = ");
Serial.print(Bpm_value);
Serial.println(" bpm");
}6, ESP32 Python Example (for Mixly IDE/Misashi)
Choose the development board Python ESP32 [ESP32 Generic(4MB)] and upload in code mode
Attention: If prompted with an error message about the library file during program upload, please import the library file first!
Download and import tutorial for Mixly IDE ESP32 library:Click to view
Example program (ESP32-Python):
from machine import I2C, Pin
import time
MAX3010X_I2C_ADDR = 0x57
REG_FIFOWRITEPTR = 0x04
REG_FIFOOVERFLOW = 0x05
REG_FIFOREADPTR = 0x06
REG_FIFODATA = 0x07
REG_FIFOCONFIG = 0x08
REG_MODECONFIG = 0x09
REG_PARTICLECONFIG = 0x0A
REG_LED1_PA = 0x0C
REG_LED2_PA = 0x0D
REG_MULTILEDCONFIG1= 0x11
REG_MULTILEDCONFIG2= 0x12
REG_PARTID = 0xFF
EXPECTED_PARTID = 0x15
def _mask_write(i2c, addr, reg, mask, bits):
cur = i2c.readfrom_mem(addr, reg, 1)[0]
cur &= mask
cur |= bits
i2c.writeto_mem(addr, reg, bytes([cur]))
class MAX3010x:
def __init__(self, i2c, address=MAX3010X_I2C_ADDR):
self.i2c = i2c
self.address = address
def read_reg(self, reg):
return self.i2c.readfrom_mem(self.address, reg, 1)[0]
def write_reg(self, reg, val):
self.i2c.writeto_mem(self.address, reg, bytes([val & 0xFF]))
def soft_reset(self):
_mask_write(self.i2c, self.address, REG_MODECONFIG, 0xBF, 0x40)
t0 = time.ticks_ms()
while time.ticks_diff(time.ticks_ms(), t0) < 100:
if (self.read_reg(REG_MODECONFIG) & 0x40) == 0:
return True
time.sleep_ms(1)
return False
def setup(self):
self.soft_reset()
_mask_write(self.i2c, self.address, REG_FIFOCONFIG, 0b11100000, 0x40)
_mask_write(self.i2c, self.address, REG_FIFOCONFIG, 0xEF, 0x10)
_mask_write(self.i2c, self.address, REG_MODECONFIG, 0xF8, 0x03)
_mask_write(self.i2c, self.address, REG_PARTICLECONFIG, 0x9F, 0x60)
_mask_write(self.i2c, self.address, REG_PARTICLECONFIG, 0xE3, 0x00)
_mask_write(self.i2c, self.address, REG_PARTICLECONFIG, 0xFC, 0x03)
self.write_reg(REG_LED1_PA, 0x4F)
self.write_reg(REG_LED2_PA, 0x4F)
_mask_write(self.i2c, self.address, REG_MULTILEDCONFIG1, 0xF8, 0x01)
_mask_write(self.i2c, self.address, REG_MULTILEDCONFIG1, 0x8F, 0x20)
self.write_reg(REG_FIFOREADPTR, 0)
self.write_reg(REG_FIFOOVERFLOW, 0)
self.write_reg(REG_FIFOWRITEPTR, 0)
def read_fifo_red_ir(self):
if self.read_reg(REG_FIFOREADPTR) == self.read_reg(REG_FIFOWRITEPTR):
return None
data = self.i2c.readfrom_mem(self.address, REG_FIFODATA, 6)
red = ((data[0] << 16) | (data[1] << 8) | data[2]) & 0x3FFFF
ir = ((data[3] << 16) | (data[4] << 8) | data[5]) & 0x3FFFF
return red, ir
lastBeatTime = 0
threshold = 2000
peak = 0
trough = 999999
amp = 0
IBI = 600
firstBeat = True
secondBeat = False
rate = [600] * 10
rate_index = 0
def checkForBeat(ir_value):
global threshold, peak, trough, amp
global lastBeatTime, firstBeat, secondBeat
global IBI, rate, rate_index
now = time.ticks_ms()
signal = ir_value
if signal < threshold and signal < trough:
trough = signal
if signal > threshold and signal > peak:
peak = signal
if signal > threshold and (time.ticks_diff(now, lastBeatTime) > 300):
IBI = time.ticks_diff(now, lastBeatTime)
lastBeatTime = now
if firstBeat:
firstBeat = False
secondBeat = True
return False
if secondBeat:
secondBeat = False
for i in range(len(rate)):
rate[i] = IBI
rate[rate_index] = IBI
rate_index = (rate_index + 1) % len(rate)
amp = peak - trough
threshold = trough + amp * 0.5
peak = threshold
trough = threshold
return True
if time.ticks_diff(now, lastBeatTime) > 2500:
threshold = signal * 0.97
peak = threshold
trough = threshold
firstBeat = True
secondBeat = False
return False
def read_bpm(timeout_ms=8000):
i2c = I2C(1, scl=Pin(22), sda=Pin(21), freq=400000)
sensor = MAX3010x(i2c)
sensor.setup()
start = time.ticks_ms()
while time.ticks_diff(time.ticks_ms(), start) < timeout_ms:
data = sensor.read_fifo_red_ir()
if not data:
time.sleep_ms(5)
continue
red, ir = data
if ir < 20000:
continue
if checkForBeat(ir):
avg_IBI = sum(rate) / len(rate)
bpm = 60000 / avg_IBI
new_bpm = bpm - 80
if new_bpm < 0:
return 0
else:
return int(new_bpm)
return 0
import machine
while True:
xinlv = read_bpm()
print(('心率值(BMP):' + str(xinlv)))
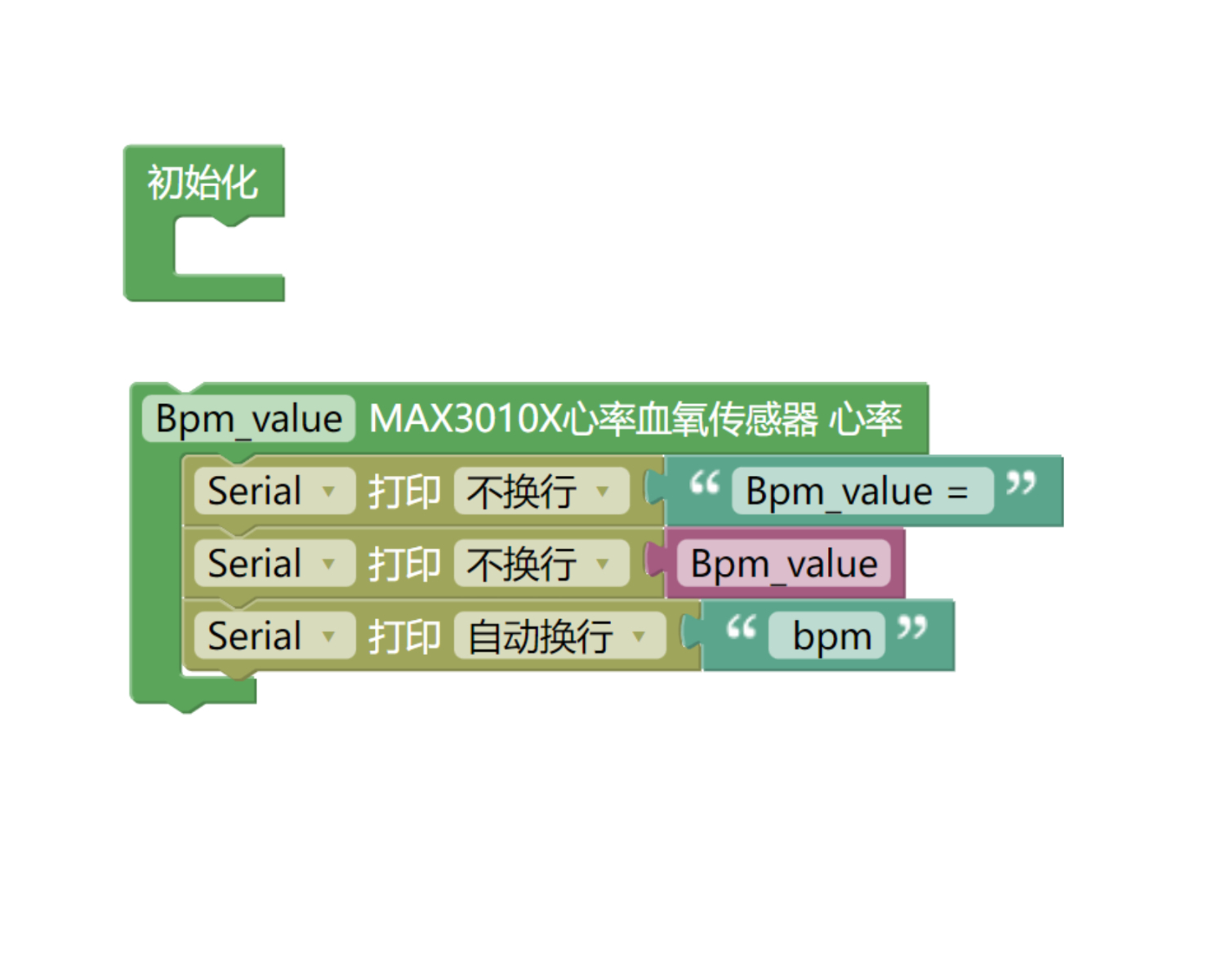
7, Mixly example program (graphical language)
Example program (UNO development board):Click to download
Attention: If prompted with an error message about the library file during program upload, please import the library file first!
Download and import tutorial of Mixly IDE Arduino library:Click to view
Example Program (ESP32 Development Board):Click to download
Attention: If prompted with an error message about the library file during program upload, please import the library file first!
Download and import tutorial for Mixly IDE ESP32 library:Click to view

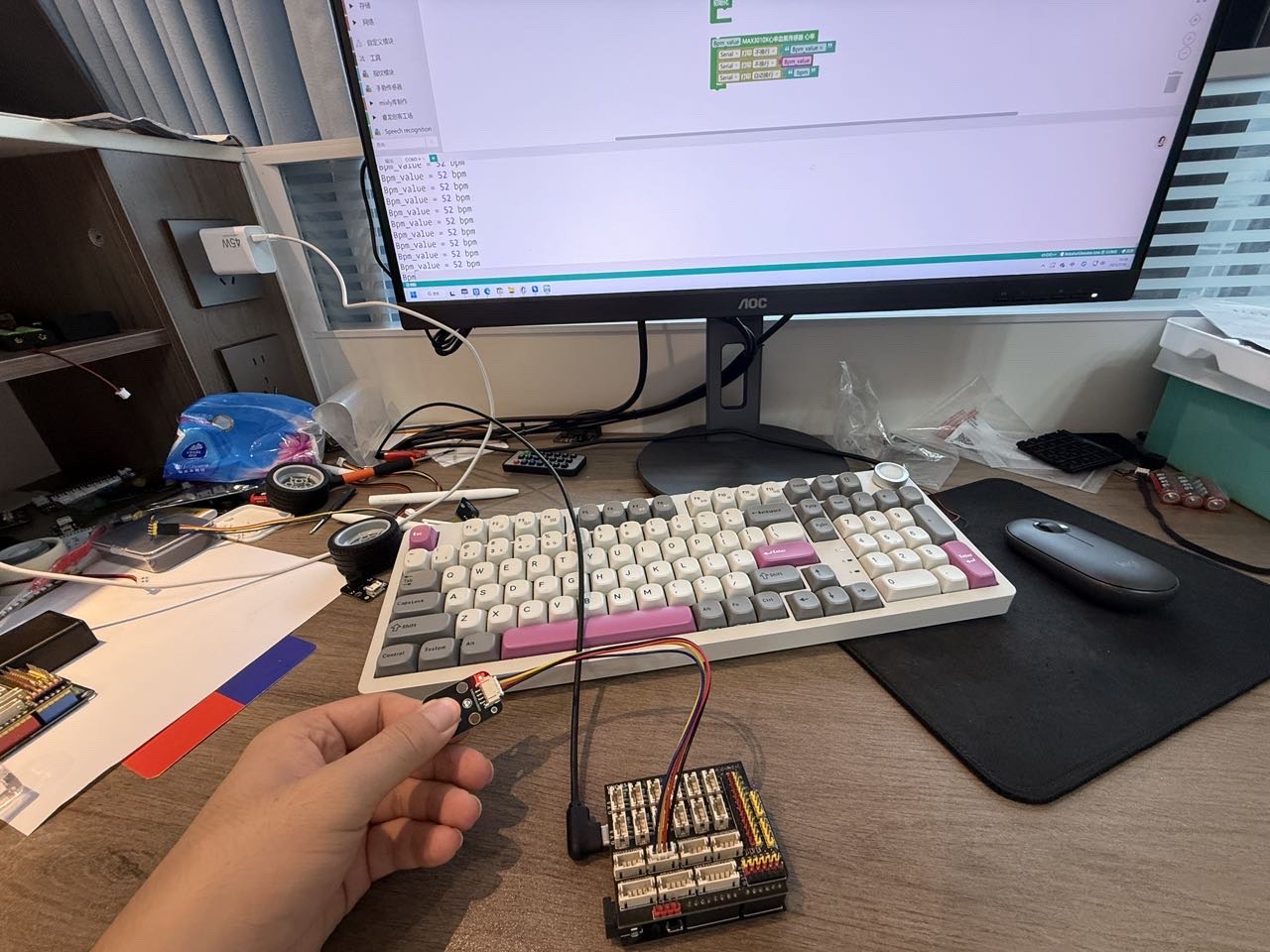
8. Setting up the Test Environment
Arduino UNO Test Environment Setup
Prepare Components:
HELLO STEM UNO R3 DEVELOPMENT BOARD *1
HELLO STEM UNO EXP1 Expansion Board *1
USB TYPE-C DATA CABLE *1
Heart rate sensor module (HS-S70-P)*1
PH2.0 4P terminal line *1
Circuit wiring diagram:Updating...
ESP32 Test Environment Setup
Prepare Components:
ESP32EA MOC development board *1
ESP32-EXP1 Expansion Board *1
USB TYPE-C DATA CABLE *1
Heart rate sensor module (HS-S70-P)*1
PH2.0 4P terminal line *1
Circuit wiring diagram:Updating...
9, Video tutorial
Video tutorial:Click to view
10, Test results
Arduino UNO test results:
Updating...
ESP32 Test Results:
After the device is connected to the wire, upload the above program to the development board, and you can then see the heart rate sensor module data test.