
1. Introduction
The I2C digital power meter is a high-resolution, high-precision, large-range measurement module that can measure the voltage, current, and power of various electronic modules and electrical equipment within 26V 8A, with a maximum relative error not exceeding ±0.2% (it requires a simple manual calibration before use).Can be used for power consumption measurement of solar systems, battery coulomb meters, motors, main control boards, or electronic modules, as well as for battery endurance evaluation and real-time online monitoring of power parameters.The module uses TI INA219 zero-drift current/power monitoring chip and a 2W high-power low-drift 10mΩ alloy sampling resistor, with voltage and current resolutions of up to 4mV and 1mA respectively. Under full-scale measurement conditions, the maximum relative measurement error of voltage and current does not exceed ±0.2%, and provides 4 I2C addresses that can be configured via a dip switch.The module can accurately measure bidirectional high-side current (the current flowing through the power source or the positive pole of the battery), which is particularly useful in solar or coulomb counter applications where the battery needs to be charged and discharged, the user can understand the charging and discharging state of the battery through the positive and negative readings of the current, and also understand the real-time voltage, current, and power of the battery's charging and discharging.In motor application scenarios, it is possible to monitor the motor current in real time to determine if the current is too high due to stall or overloading, and take protective measures in a timely manner.In addition, this module can also be used to measure the real-time power consumption of various electronic modules or the entire project, thereby assessing the battery life.
2. Schematic
I2C Digital Power Meter - HS-S73P SchematicClick to view
Module Parameters
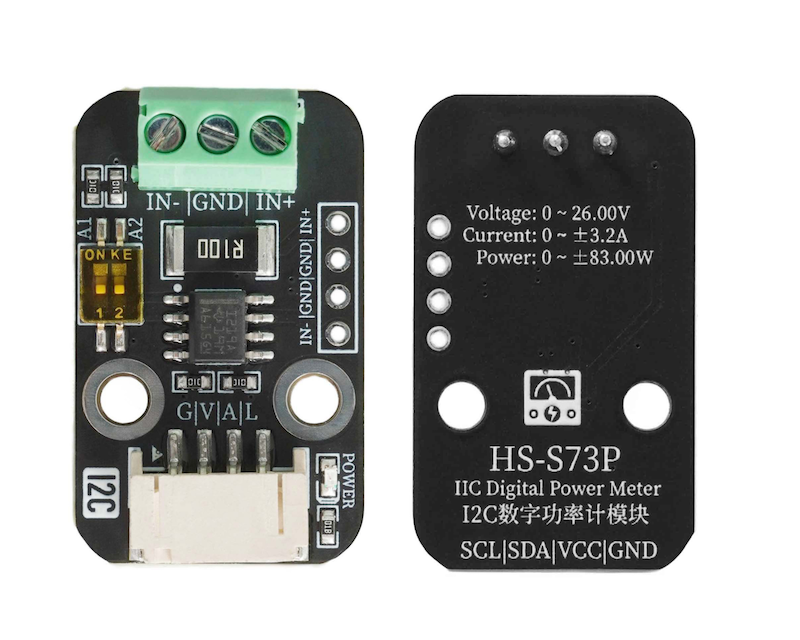
Pin Name | description |
|---|---|
G | GND (Negative Power Input) |
V | VCC (Positive Power Input) |
A | Data pin |
L | clock pin |
Supply voltage: 3.3V-5V
Connection method: PH2.0 4P terminal wire
Installation method: Screw fixed
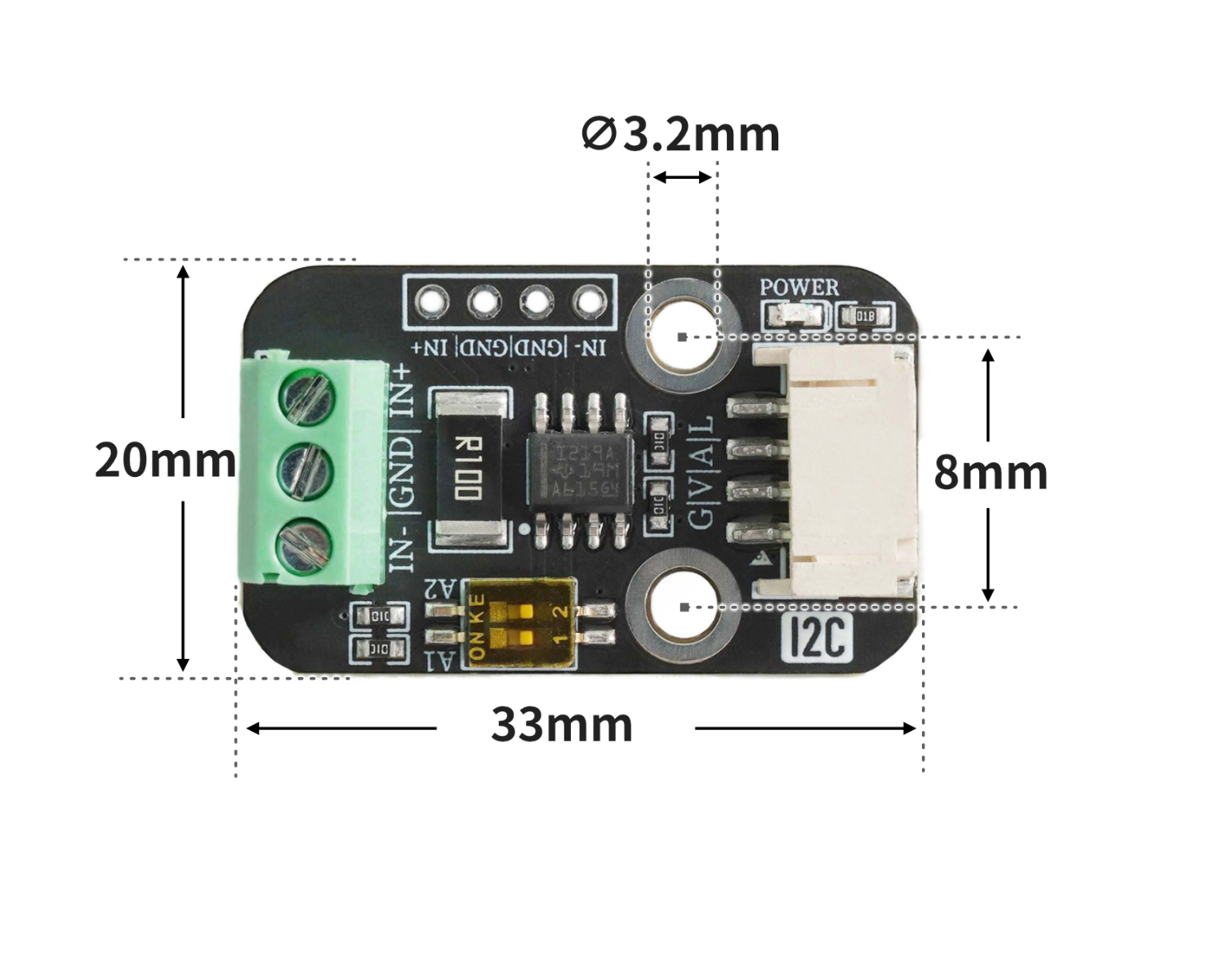
4, Circuit Board Size
5 of Arduino IDE example program
Attention: If prompted with an error message about the library file during program upload, please import the library file first!
Arduino IDE Library Download and Import Tutorial:Click to view
Example program (UNO development board):
#include "DFRobot_INA219.h"
#include <Wire.h>
DFRobot_INA219_IIC ina219(&Wire, INA219_I2C_ADDRESS4);
float ina219Reading_mA = 1000;
float extMeterReading_mA = 1000;
void setup(){
while (!ina219.begin()) {
Serial.println("INA219 初始化失败:请检查I2C接线/地址是否正确");
delay(1000);
}
ina219.linearCalibrate(ina219Reading_mA, extMeterReading_mA);
Serial.begin(9600);
}
void loop(){
Serial.println(String("总线电压:") + String(ina219.getBusVoltage_V()));
Serial.println(String("分流电压:") + String(ina219.getShuntVoltage_mV()));
Serial.println(String("电流值:") + String(ina219.getCurrent_mA()));
Serial.println(String("功率值") + String(ina219.getPower_mW()));
Serial.println(String("------------------"));
delay(500);
}6, ESP32 Python Example (for Mixly IDE/Misashi)
Choose the development board Python ESP32 [ESP32 Generic(4MB)] and upload in code mode
Attention: If prompted with an error message about the library file during program upload, please import the library file first!
Download and import tutorial for Mixly IDE ESP32 library:Click to view
Example program (ESP32-Python):
from machine import I2C, Pin
import time
INA219_REG_CONFIG = 0x00
INA219_REG_SHUNTVOLTAGE = 0x01
INA219_REG_BUSVOLTAGE = 0x02
INA219_REG_POWER = 0x03
INA219_REG_CURRENT = 0x04
INA219_REG_CALIBRATION = 0x05
INA219_CONFIG_RESET = 0x8000
INA219_I2C_ADDRESS1 = 0x40
INA219_I2C_ADDRESS2 = 0x41
INA219_I2C_ADDRESS3 = 0x44
INA219_I2C_ADDRESS4 = 0x45
class eIna219BusVolRange_t:
eIna219BusVolRange_16V = 0x0000
eIna219BusVolRange_32V = 0x2000
class eIna219PGABits_t:
eIna219PGABits_1 = 0x0000
eIna219PGABits_2 = 0x0800
eIna219PGABits_4 = 0x1000
eIna219PGABits_8 = 0x1800
class eIna219AdcBits_t:
eIna219AdcBits_9 = 0
eIna219AdcBits_10 = 1
eIna219AdcBits_11 = 2
eIna219AdcBits_12 = 3
class eIna219AdcSample_t:
eIna219AdcSample_1 = 0x00
eIna219AdcSample_2 = 0x01
eIna219AdcSample_4 = 0x02
eIna219AdcSample_8 = 0x03
eIna219AdcSample_16 = 0x04
eIna219AdcSample_32 = 0x05
eIna219AdcSample_64 = 0x06
eIna219AdcSample_128 = 0x07
class eInaMode_t:
eIna219PowerDown = 0x00
eIna219SVolTrig = 0x01
eIna219BVolTrig = 0x02
eIna219SAndBVolTrig = 0x03
eIna219AdcOff = 0x04
eIna219SVolCon = 0x05
eIna219BVolCon = 0x06
eIna219SAndBVolCon = 0x07
class HELLO_STEM_INA219:
def __init__(self, i2c_bus, i2c_addr=INA219_I2C_ADDRESS1):
self._i2c = i2c_bus
self._addr = i2c_addr
self.calValue = 0x0000
self.lastOperateStatus = 'eIna219_InitError'
def _writeReg(self, reg, data):
try:
buffer = bytearray([reg, (data >> 8) & 0xFF, data & 0xFF])
self._i2c.writeto(self._addr, buffer)
self.lastOperateStatus = 'eIna219_ok'
except Exception:
self.lastOperateStatus = 'eIna219_WriteRegError'
def _readReg(self, reg):
try:
self._i2c.writeto(self._addr, bytearray([reg]))
buffer = self._i2c.readfrom(self._addr, 2)
self.lastOperateStatus = 'eIna219_ok'
return (buffer[0] << 8) | buffer[1]
except Exception:
self.lastOperateStatus = 'eIna219_ReadRegError'
return 0
def _readInaReg(self, reg):
value = self._readReg(reg)
if value & 0x8000:
return value - 0x10000
return value
def _readInaRegUnsigned(self, reg):
return self._readReg(reg)
def _writeInaReg(self, reg, value):
self._writeReg(reg, value)
def scan(self):
try:
self._i2c.writeto(self._addr, bytearray([]))
return True
except OSError as e:
if str(e) == '[Errno 5] EIO':
return False
return False
def begin(self):
self.lastOperateStatus = 'eIna219_InitError'
if self.scan():
self.setBRNG(eIna219BusVolRange_t.eIna219BusVolRange_32V)
self.setPGA(eIna219PGABits_t.eIna219PGABits_8)
self.setBADC(eIna219AdcBits_t.eIna219AdcBits_12, eIna219AdcSample_t.eIna219AdcSample_8)
self.setSADC(eIna219AdcBits_t.eIna219AdcBits_12, eIna219AdcSample_t.eIna219AdcSample_8)
self.setMode(eInaMode_t.eIna219SAndBVolCon)
self.calValue = 4096
self._writeInaReg(INA219_REG_CALIBRATION, self.calValue)
self.lastOperateStatus = 'eIna219_ok'
return True
else:
return False
def linearCalibrate(self, ina219Reading_mA, extMeterReading_mA):
if ina219Reading_mA == 0:
return
new_calValue = int((extMeterReading_mA / ina219Reading_mA) * self.calValue) & 0xFFFE
self.calValue = new_calValue
self._writeInaReg(INA219_REG_CALIBRATION, self.calValue)
def getBusVoltage_V(self):
reg_val = self._readInaRegUnsigned(INA219_REG_BUSVOLTAGE)
return float(reg_val >> 3) * 0.004
def getShuntVoltage_mV(self):
reg_val = self._readInaReg(INA219_REG_SHUNTVOLTAGE)
return float(reg_val) * 0.01
def getCurrent_mA(self):
return float(self._readInaReg(INA219_REG_CURRENT))
def getPower_mW(self):
return float(self._readInaReg(INA219_REG_POWER)) * 20.0
def setBRNG(self, value):
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x2000
conf |= value
self._writeInaReg(INA219_REG_CONFIG, conf)
def setPGA(self, bits):
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x1800
conf |= bits
self._writeInaReg(INA219_REG_CONFIG, conf)
def _get_adc_value(self, bits, sample):
if bits < eIna219AdcBits_t.eIna219AdcBits_12 and sample > eIna219AdcSample_t.eIna219AdcSample_1:
return -1
if bits < eIna219AdcBits_t.eIna219AdcBits_12:
return bits
else:
return 0x08 | sample
def setBADC(self, bits, sample):
value = self._get_adc_value(bits, sample)
if value == -1:
return
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x0780
conf |= value << 7
self._writeInaReg(INA219_REG_CONFIG, conf)
def setSADC(self, bits, sample):
value = self._get_adc_value(bits, sample)
if value == -1:
return
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x0078
conf |= value << 3
self._writeInaReg(INA219_REG_CONFIG, conf)
def setMode(self, mode):
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x0007
conf |= mode
self._writeInaReg(INA219_REG_CONFIG, conf)
def reset(self):
self._writeInaReg(INA219_REG_CONFIG, INA219_CONFIG_RESET)
i2c = I2C(1, scl=Pin(22), sda=Pin(21), freq=400000)
sensor = HELLO_STEM_INA219(i2c, i2c_addr=INA219_I2C_ADDRESS4)
if sensor.begin():
print("INA219 初始化成功!")
else:
print("INA219 初始化失败,请检查接线和地址!")
import machine
while True:
print(('总线电压:' + str(sensor.getBusVoltage_V())))
print(('分流电压:' + str(sensor.getShuntVoltage_mV())))
print(('电流: ' + str(sensor.getCurrent_mA())))
print(('功率: ' + str(sensor.getPower_mW())))
time.sleep(1)
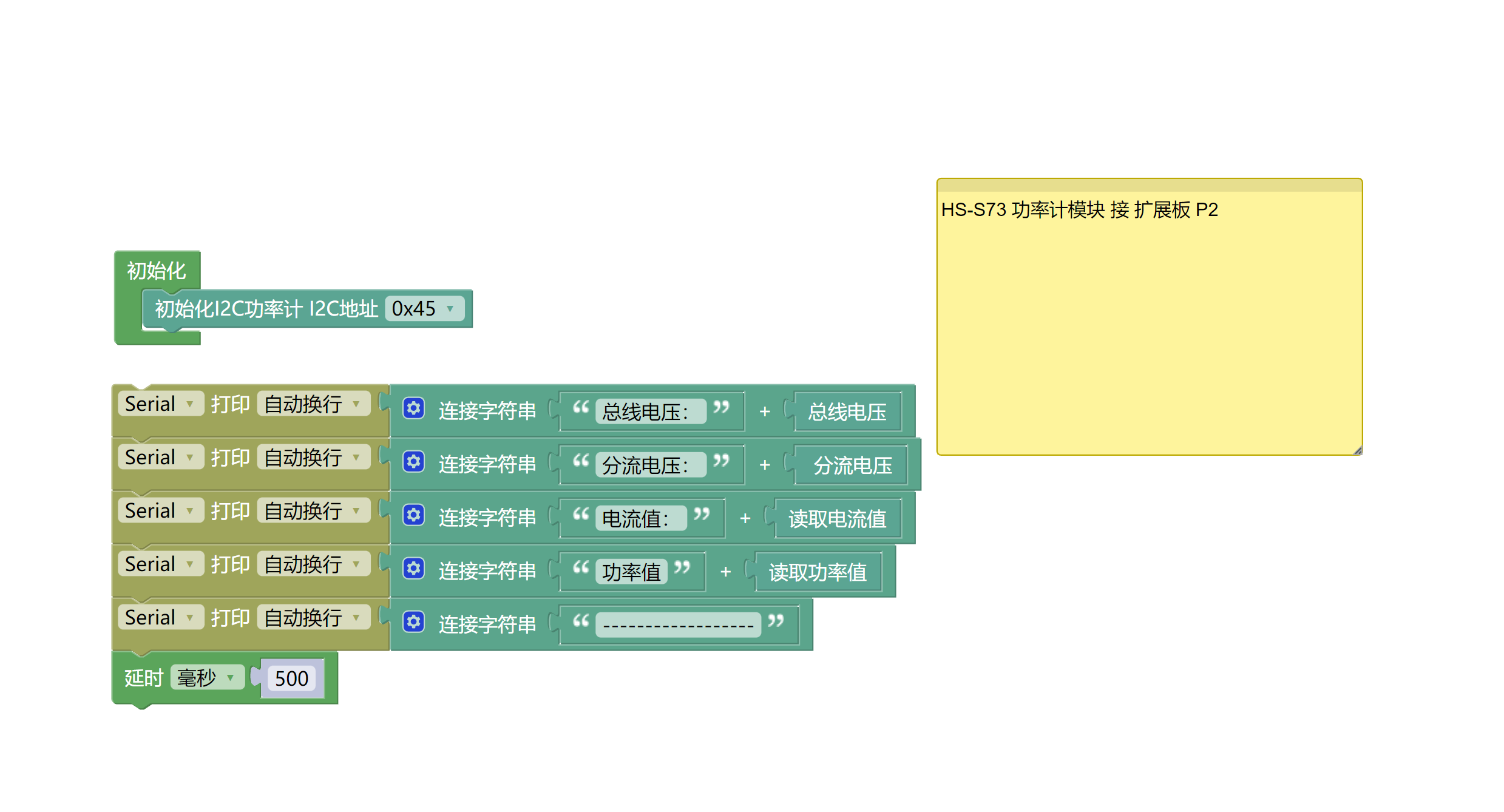
7, Mixly example program (graphical language)
Example program (UNO development board):Click to download
Attention: If prompted with an error message about the library file during program upload, please import the library file first!
Download and import tutorial of Mixly IDE Arduino library:Click to view
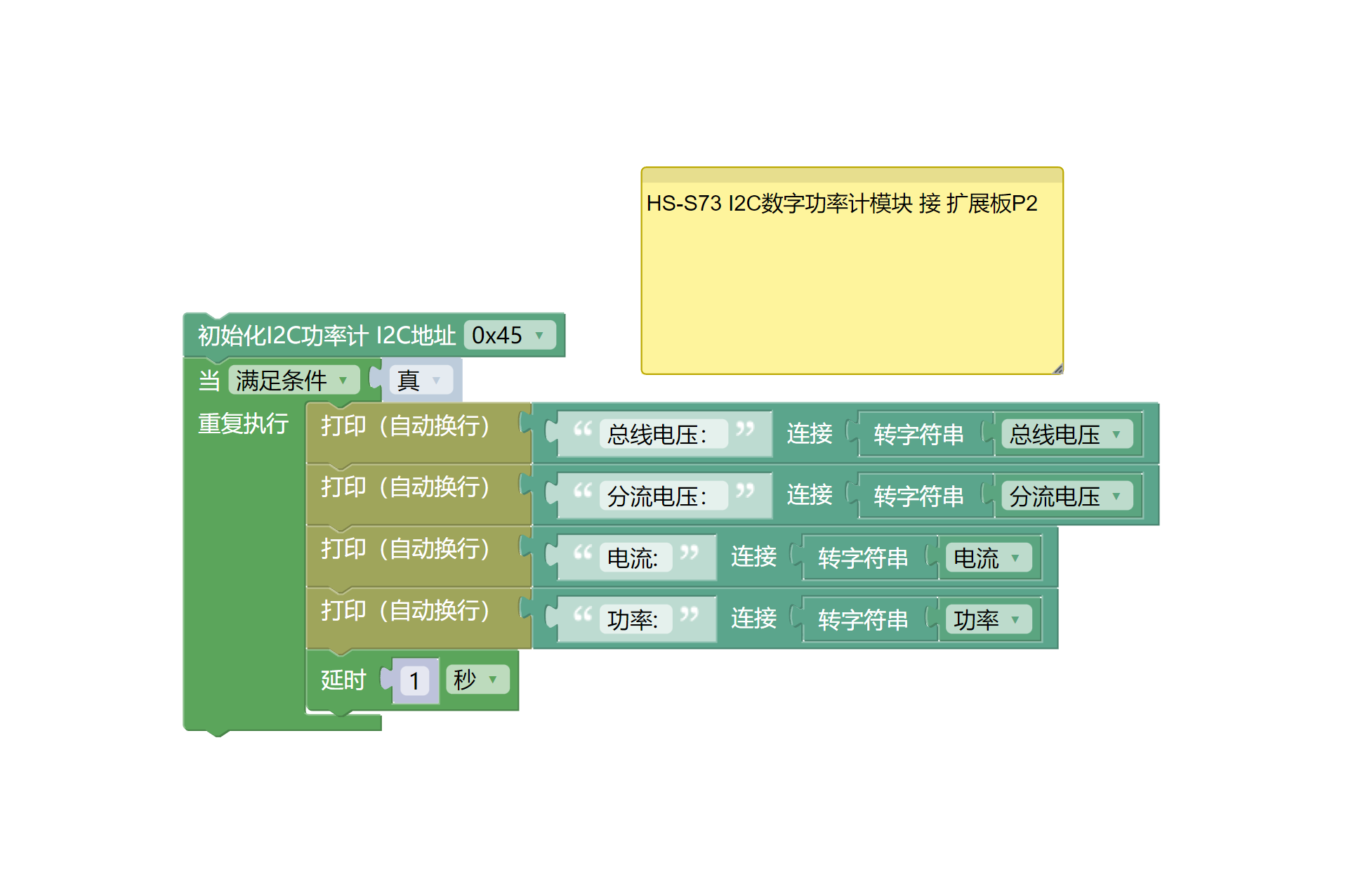
Example Program (ESP32 Development Board):Click to download
Attention: If prompted with an error message about the library file during program upload, please import the library file first!
Download and import tutorial for Mixly IDE ESP32 library:Click to view
8. Setting up the Test Environment
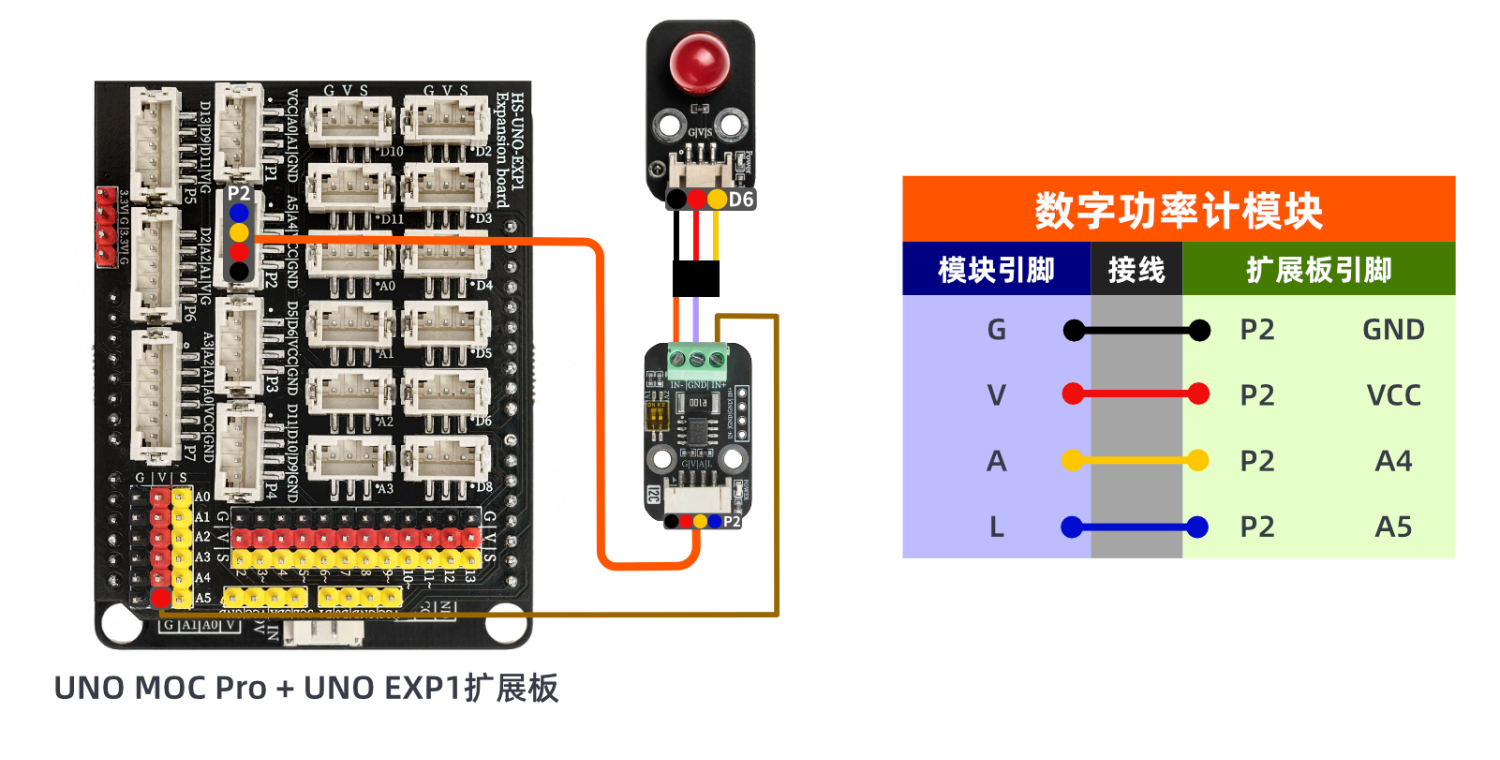
Arduino UNO Test Environment Setup
Prepare Components:
UNO-R3 Development Board *1
UNO-R3 Expansion Board *1
USB TYPE-C DATA CABLE *1
HS-S73-P I2C digital power meter module *1
LED light module *1
PH2.0 4P Double Head Terminal Line *1
Circuit wiring diagram:
9, Video tutorial
Video tutorial:Click to view
10, Test results
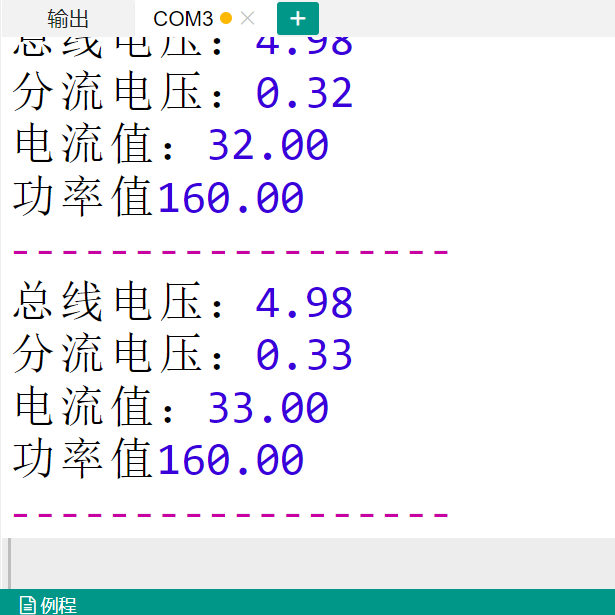
Arduino UNO test results:
Found serial port display bus voltage, shunt voltage, current value, power value.
ESP32 Test Results:
Pending update...