
1、介紹
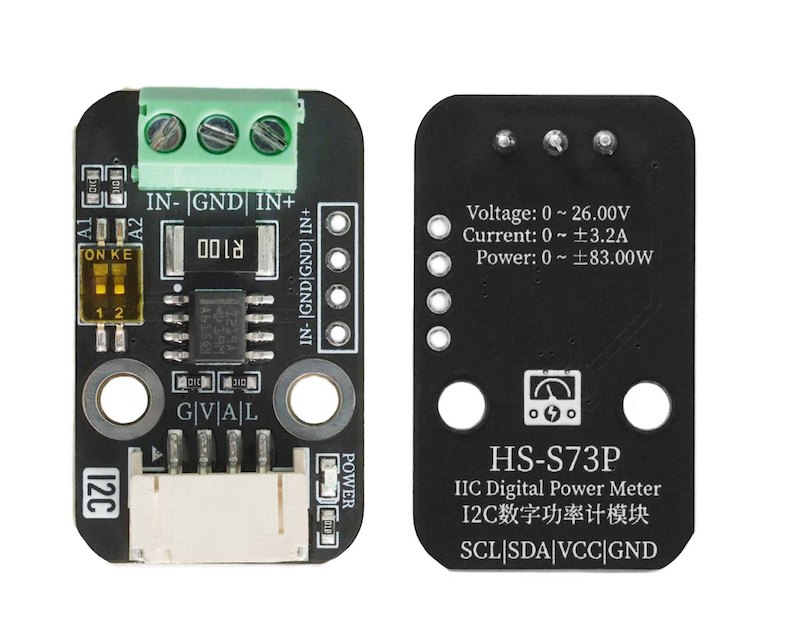
2、原理圖
3、模組參數
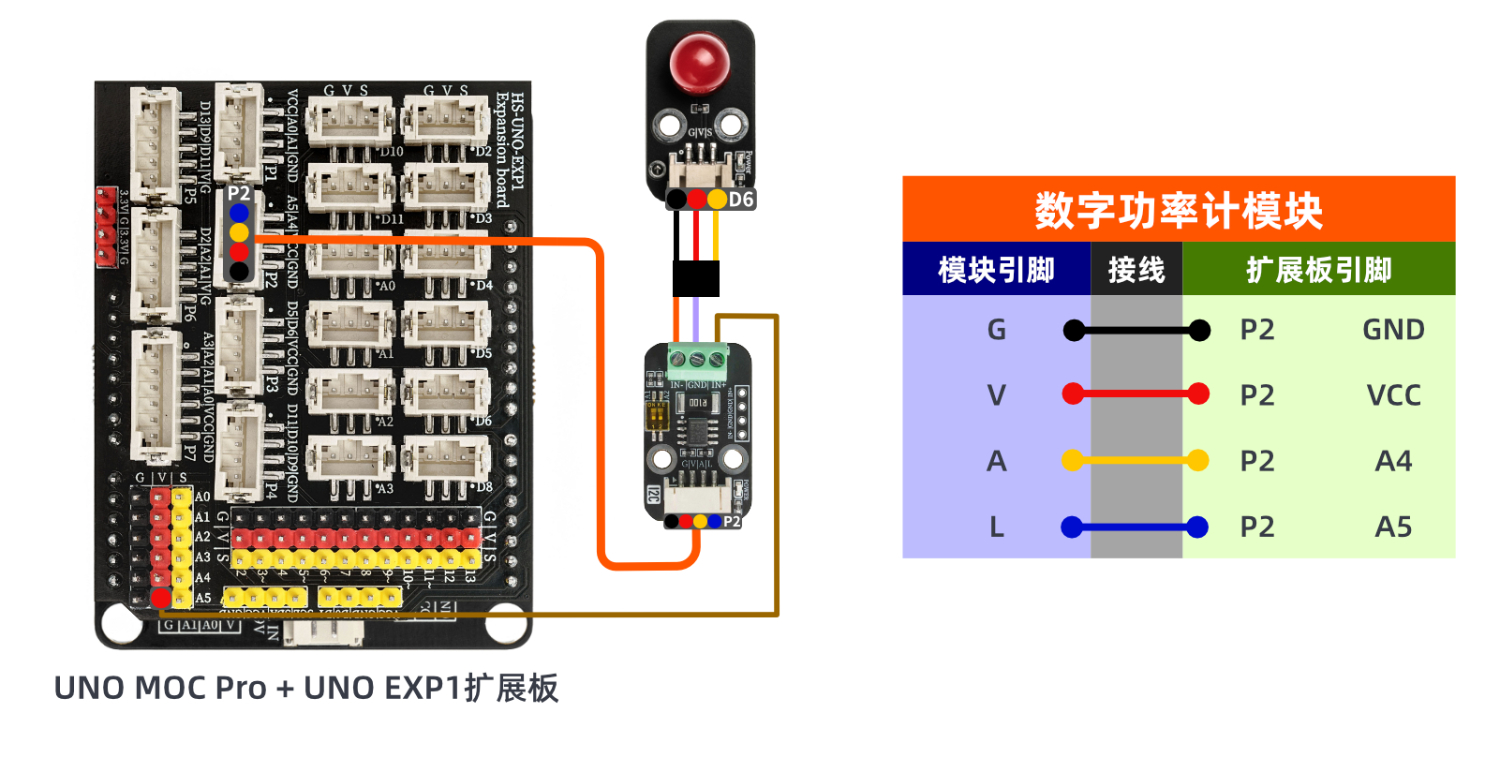
引腳名稱 | 描述 |
|---|---|
G | GND(電源輸入負極) |
V | VCC(電源輸入正極) |
A | 數據引腳 |
L | 時鐘引腳 |
供電電壓: 3.3V-5V
連接方式:PH2.0 4P端子線
安裝方式:螺絲固定
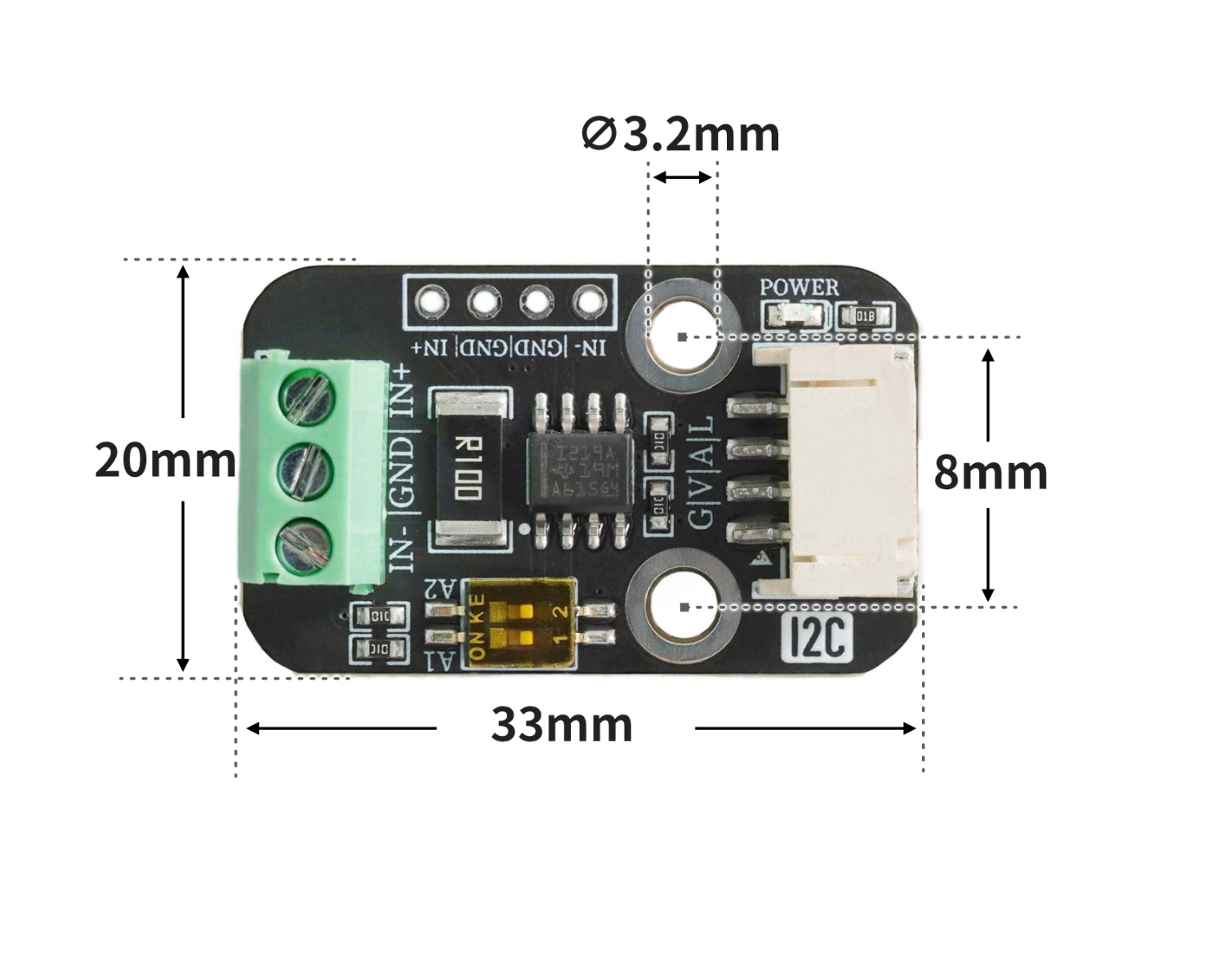
4、電路板尺寸
5、Arduino IDE示範程序
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
Arduino IDE 庁件文件下載及導入教範:點擊查看
示範程序(UNO開發板):
#include "DFRobot_INA219.h"
#include <Wire.h>
DFRobot_INA219_IIC ina219(&Wire, INA219_I2C_ADDRESS4);
float ina219Reading_mA = 1000;
float extMeterReading_mA = 1000;
void setup(){
while (!ina219.begin()) {
Serial.println("INA219 初始化失败:请检查I2C接线/地址是否正确");
delay(1000);
}
ina219.linearCalibrate(ina219Reading_mA, extMeterReading_mA);
Serial.begin(9600);
}
void loop(){
Serial.println(String("总线电压:") + String(ina219.getBusVoltage_V()));
Serial.println(String("分流电压:") + String(ina219.getShuntVoltage_mV()));
Serial.println(String("电流值:") + String(ina219.getCurrent_mA()));
Serial.println(String("功率值") + String(ina219.getPower_mW()));
Serial.println(String("------------------"));
delay(500);
}6、ESP32 Python 示例(適用於Mixly IDE /米思齊)
開發板選擇 Python ESP32 【ESP32 Generic(4MB)】切換為代碼模式上傳
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE ESP32庫檔案下載及匯入教學:點擊查看
示例程式(ESP32-Python):
from machine import I2C, Pin
import time
INA219_REG_CONFIG = 0x00
INA219_REG_SHUNTVOLTAGE = 0x01
INA219_REG_BUSVOLTAGE = 0x02
INA219_REG_POWER = 0x03
INA219_REG_CURRENT = 0x04
INA219_REG_CALIBRATION = 0x05
INA219_CONFIG_RESET = 0x8000
INA219_I2C_ADDRESS1 = 0x40
INA219_I2C_ADDRESS2 = 0x41
INA219_I2C_ADDRESS3 = 0x44
INA219_I2C_ADDRESS4 = 0x45
class eIna219BusVolRange_t:
eIna219BusVolRange_16V = 0x0000
eIna219BusVolRange_32V = 0x2000
class eIna219PGABits_t:
eIna219PGABits_1 = 0x0000
eIna219PGABits_2 = 0x0800
eIna219PGABits_4 = 0x1000
eIna219PGABits_8 = 0x1800
class eIna219AdcBits_t:
eIna219AdcBits_9 = 0
eIna219AdcBits_10 = 1
eIna219AdcBits_11 = 2
eIna219AdcBits_12 = 3
class eIna219AdcSample_t:
eIna219AdcSample_1 = 0x00
eIna219AdcSample_2 = 0x01
eIna219AdcSample_4 = 0x02
eIna219AdcSample_8 = 0x03
eIna219AdcSample_16 = 0x04
eIna219AdcSample_32 = 0x05
eIna219AdcSample_64 = 0x06
eIna219AdcSample_128 = 0x07
class eInaMode_t:
eIna219PowerDown = 0x00
eIna219SVolTrig = 0x01
eIna219BVolTrig = 0x02
eIna219SAndBVolTrig = 0x03
eIna219AdcOff = 0x04
eIna219SVolCon = 0x05
eIna219BVolCon = 0x06
eIna219SAndBVolCon = 0x07
class HELLO_STEM_INA219:
def __init__(self, i2c_bus, i2c_addr=INA219_I2C_ADDRESS1):
self._i2c = i2c_bus
self._addr = i2c_addr
self.calValue = 0x0000
self.lastOperateStatus = 'eIna219_InitError'
def _writeReg(self, reg, data):
try:
buffer = bytearray([reg, (data >> 8) & 0xFF, data & 0xFF])
self._i2c.writeto(self._addr, buffer)
self.lastOperateStatus = 'eIna219_ok'
except Exception:
self.lastOperateStatus = 'eIna219_WriteRegError'
def _readReg(self, reg):
try:
self._i2c.writeto(self._addr, bytearray([reg]))
buffer = self._i2c.readfrom(self._addr, 2)
self.lastOperateStatus = 'eIna219_ok'
return (buffer[0] << 8) | buffer[1]
except Exception:
self.lastOperateStatus = 'eIna219_ReadRegError'
return 0
def _readInaReg(self, reg):
value = self._readReg(reg)
if value & 0x8000:
return value - 0x10000
return value
def _readInaRegUnsigned(self, reg):
return self._readReg(reg)
def _writeInaReg(self, reg, value):
self._writeReg(reg, value)
def scan(self):
try:
self._i2c.writeto(self._addr, bytearray([]))
return True
except OSError as e:
if str(e) == '[Errno 5] EIO':
return False
return False
def begin(self):
self.lastOperateStatus = 'eIna219_InitError'
if self.scan():
self.setBRNG(eIna219BusVolRange_t.eIna219BusVolRange_32V)
self.setPGA(eIna219PGABits_t.eIna219PGABits_8)
self.setBADC(eIna219AdcBits_t.eIna219AdcBits_12, eIna219AdcSample_t.eIna219AdcSample_8)
self.setSADC(eIna219AdcBits_t.eIna219AdcBits_12, eIna219AdcSample_t.eIna219AdcSample_8)
self.setMode(eInaMode_t.eIna219SAndBVolCon)
self.calValue = 4096
self._writeInaReg(INA219_REG_CALIBRATION, self.calValue)
self.lastOperateStatus = 'eIna219_ok'
return True
else:
return False
def linearCalibrate(self, ina219Reading_mA, extMeterReading_mA):
if ina219Reading_mA == 0:
return
new_calValue = int((extMeterReading_mA / ina219Reading_mA) * self.calValue) & 0xFFFE
self.calValue = new_calValue
self._writeInaReg(INA219_REG_CALIBRATION, self.calValue)
def getBusVoltage_V(self):
reg_val = self._readInaRegUnsigned(INA219_REG_BUSVOLTAGE)
return float(reg_val >> 3) * 0.004
def getShuntVoltage_mV(self):
reg_val = self._readInaReg(INA219_REG_SHUNTVOLTAGE)
return float(reg_val) * 0.01
def getCurrent_mA(self):
return float(self._readInaReg(INA219_REG_CURRENT))
def getPower_mW(self):
return float(self._readInaReg(INA219_REG_POWER)) * 20.0
def setBRNG(self, value):
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x2000
conf |= value
self._writeInaReg(INA219_REG_CONFIG, conf)
def setPGA(self, bits):
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x1800
conf |= bits
self._writeInaReg(INA219_REG_CONFIG, conf)
def _get_adc_value(self, bits, sample):
if bits < eIna219AdcBits_t.eIna219AdcBits_12 and sample > eIna219AdcSample_t.eIna219AdcSample_1:
return -1
if bits < eIna219AdcBits_t.eIna219AdcBits_12:
return bits
else:
return 0x08 | sample
def setBADC(self, bits, sample):
value = self._get_adc_value(bits, sample)
if value == -1:
return
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x0780
conf |= value << 7
self._writeInaReg(INA219_REG_CONFIG, conf)
def setSADC(self, bits, sample):
value = self._get_adc_value(bits, sample)
if value == -1:
return
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x0078
conf |= value << 3
self._writeInaReg(INA219_REG_CONFIG, conf)
def setMode(self, mode):
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x0007
conf |= mode
self._writeInaReg(INA219_REG_CONFIG, conf)
def reset(self):
self._writeInaReg(INA219_REG_CONFIG, INA219_CONFIG_RESET)
i2c = I2C(1, scl=Pin(22), sda=Pin(21), freq=400000)
sensor = HELLO_STEM_INA219(i2c, i2c_addr=INA219_I2C_ADDRESS4)
if sensor.begin():
print("INA219 初始化成功!")
else:
print("INA219 初始化失败,请检查接线和地址!")
import machine
while True:
print(('总线电压:' + str(sensor.getBusVoltage_V())))
print(('分流电压:' + str(sensor.getShuntVoltage_mV())))
print(('电流: ' + str(sensor.getCurrent_mA())))
print(('功率: ' + str(sensor.getPower_mW())))
time.sleep(1)
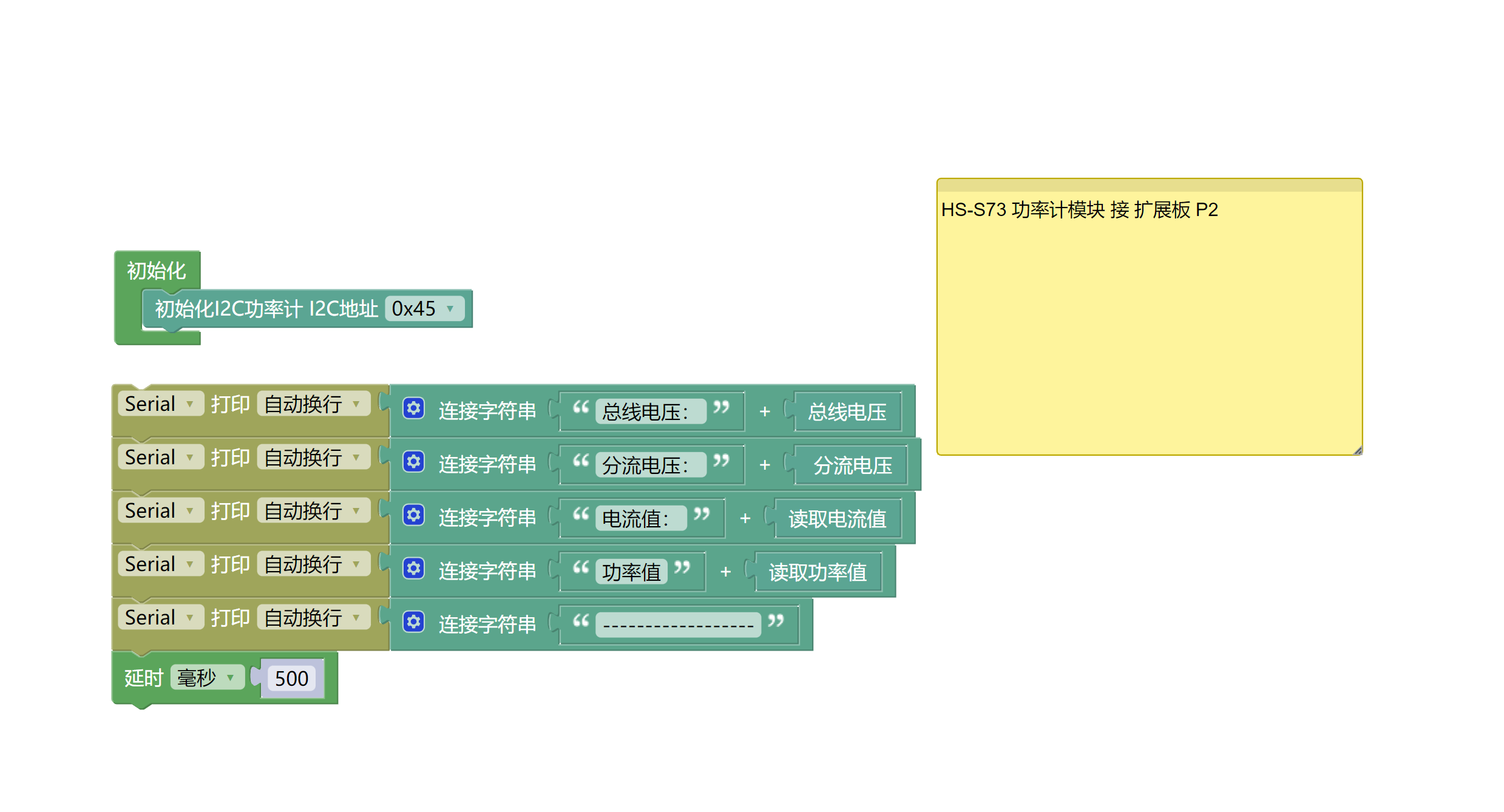
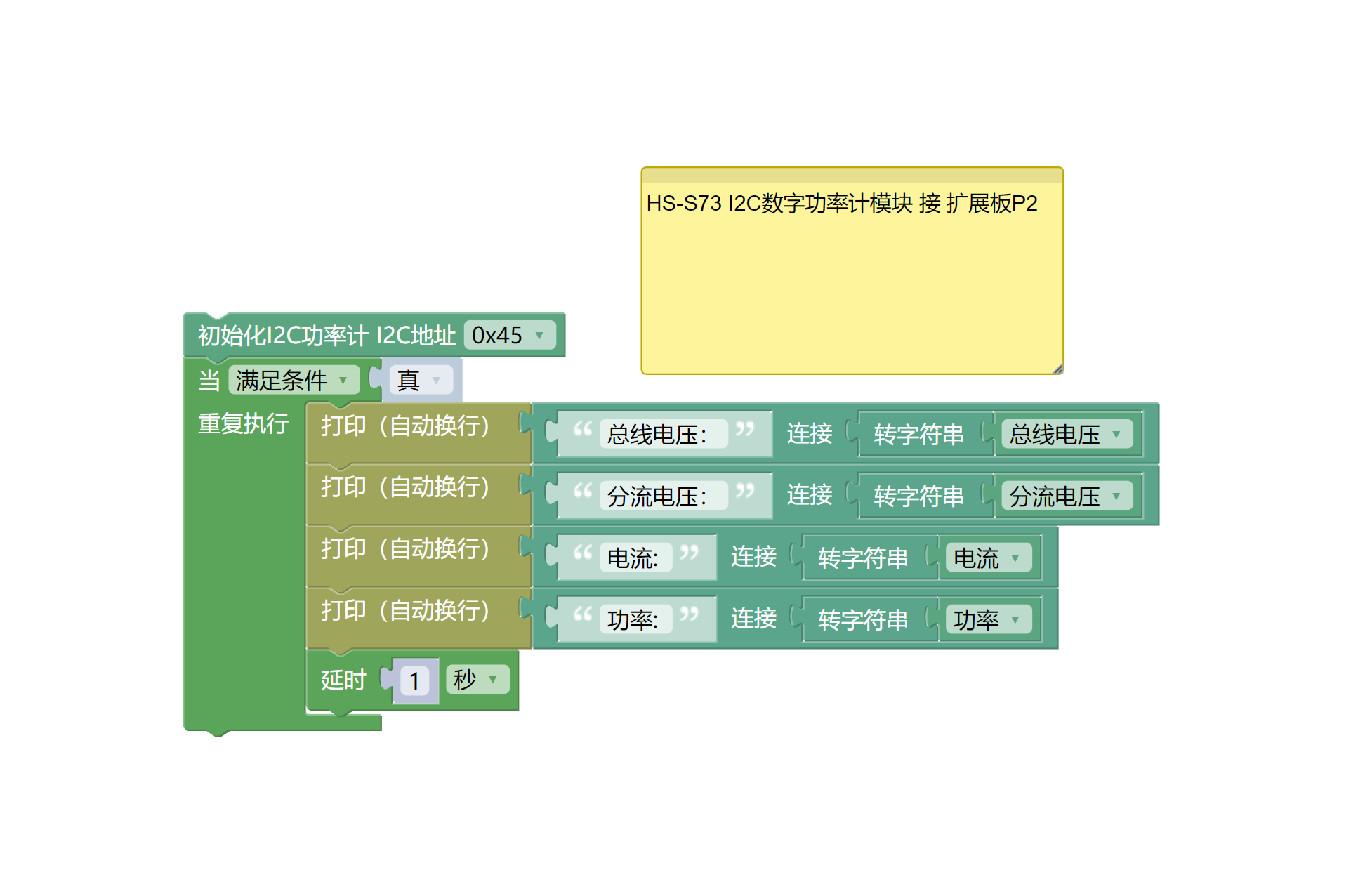
7、米思齊 Mixly 示例程式(圖形化語言)
示範程序(UNO開發板):點擊下載
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE Arduino 圖庫檔案下載及匯入教學:點擊查看
示範程序(ESP32開發板):點擊下載
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE ESP32庫檔案下載及匯入教學:點擊查看
8、測試環境搭建
Arduino UNO 測試環境搭建
準備配件:
UNO-R3 開發板 *1
UNO-R3 EXP 開放板 *1
USB type-c 資料線 *1
HS-S73-P I2C數字功率計模塊 *1
LED燈模塊 *1
PH2.0 4P雙頭端子線 *1
電路接線圖:
9、視頻教學
視頻教學:點擊查看
10、測試結果
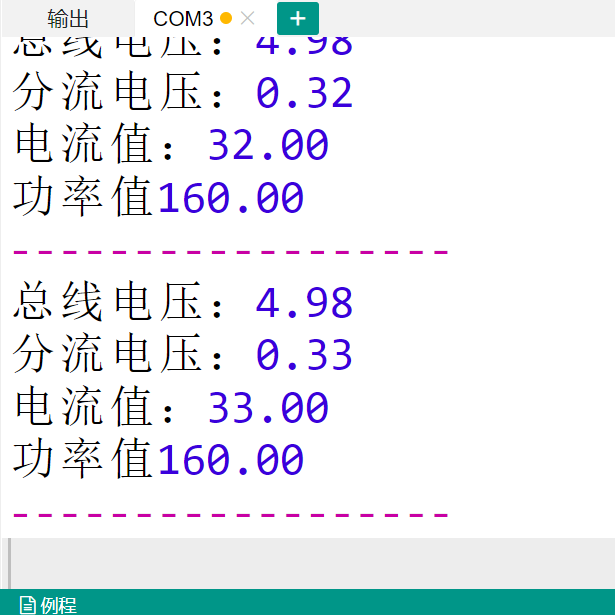
Arduino UNO測試結果:
發現串口顯示總線電壓、分流電壓、電流值、功率值。
ESP32 測試結果:
等更新...