
1、소개
2、시뮬레이션 그래프
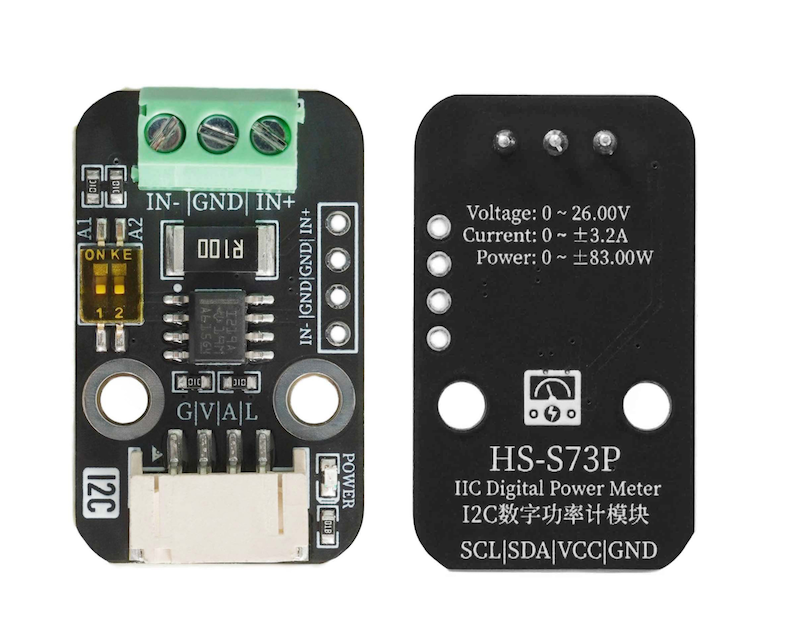
3、모듈 매개변수
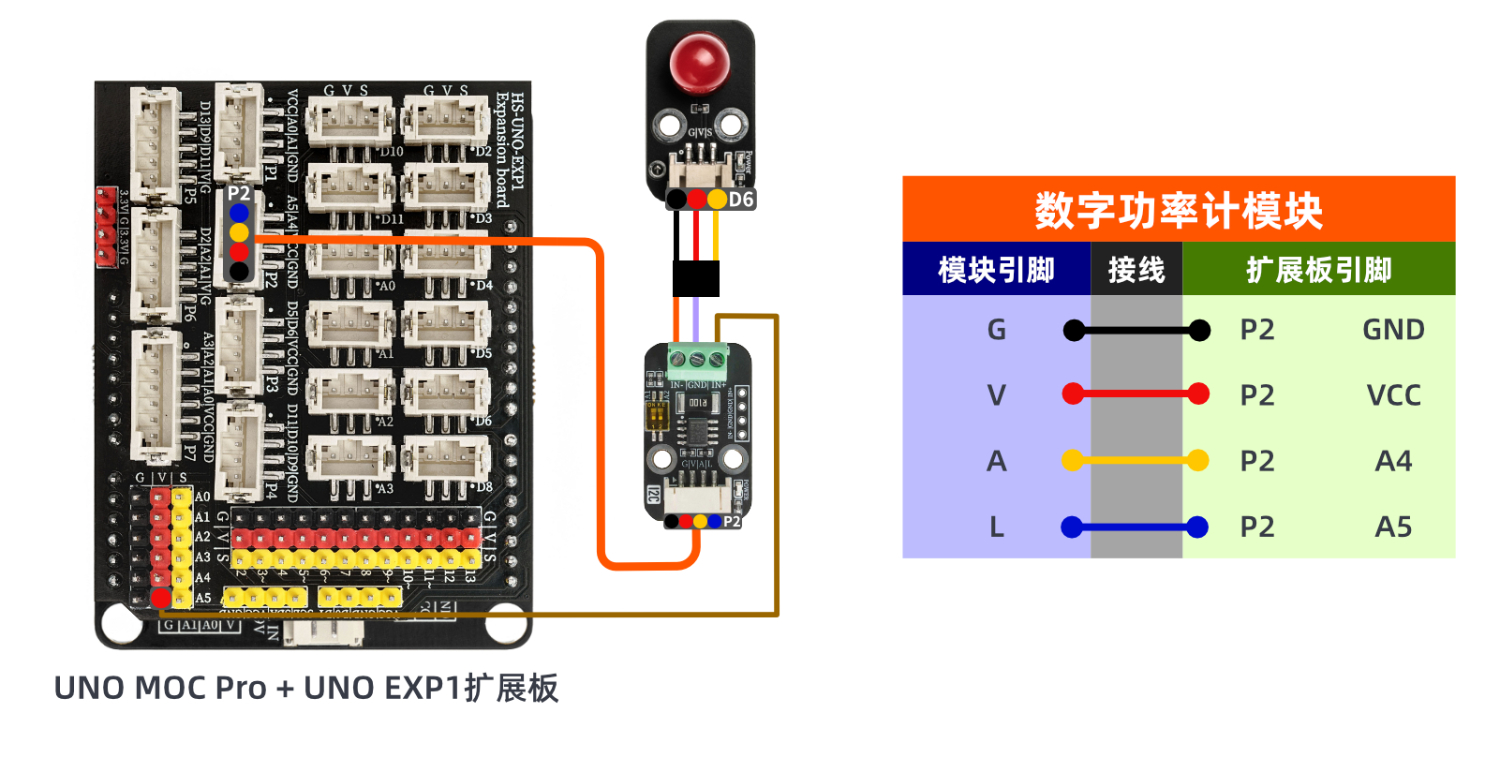
핀 이름 | 설명 |
|---|---|
G | GND(전원 입력 부정极) |
V | VCC(전원 입력 정극) |
A | 데이터핀 |
L | 시계핀 |
전원 공급 전압: 3.3V-5V
연결 방식: PH2.0 4P 핀 라인
安装方式:螺丝固定
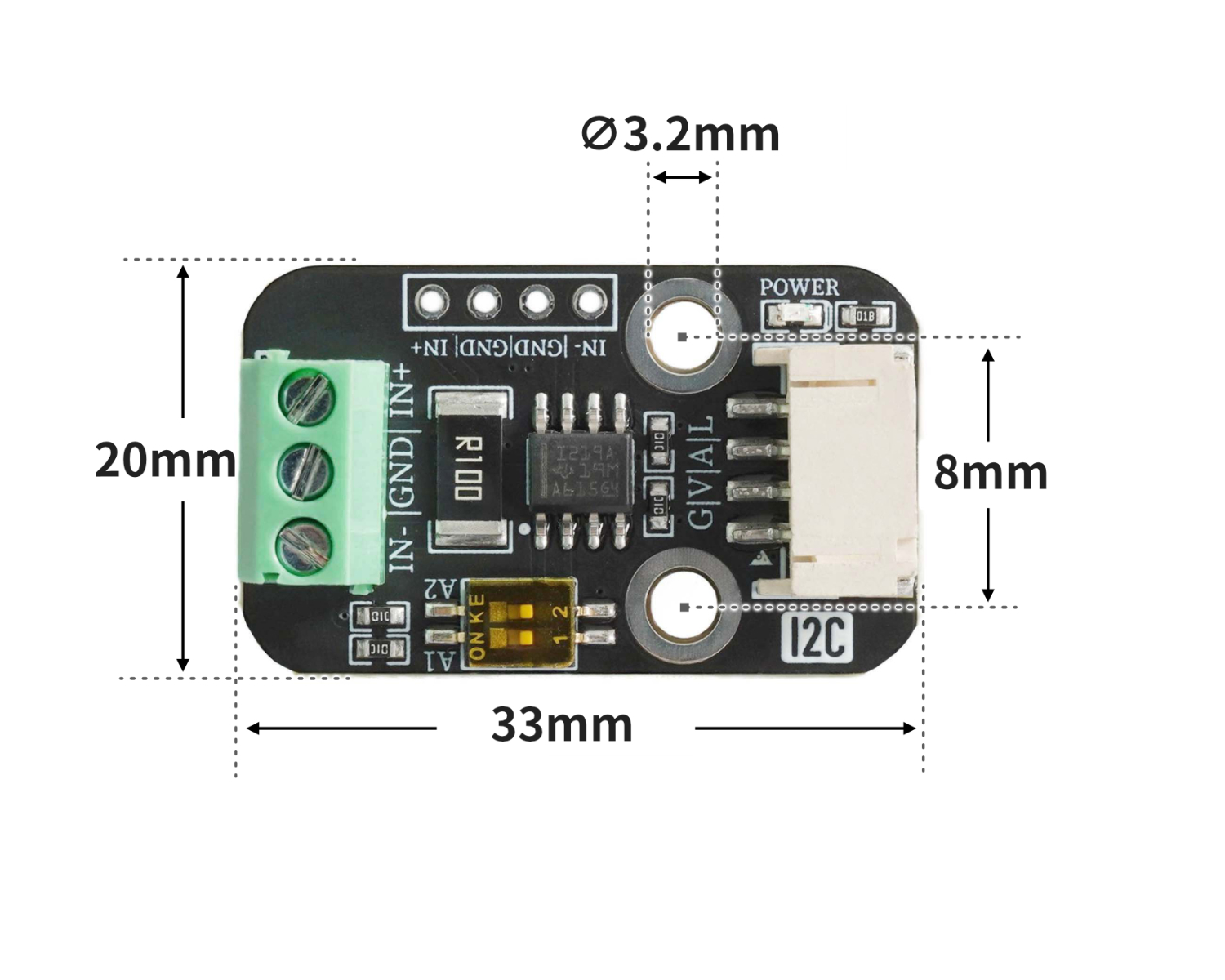
4、회로판 크기
5、아두이노 IDE 예제 프로그램
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
Arduino IDE 라이브러리 다운로드 및 导入 가이드:点击查看
예제 프로그램(UNO 개발 보드):
#include "DFRobot_INA219.h"
#include <Wire.h>
DFRobot_INA219_IIC ina219(&Wire, INA219_I2C_ADDRESS4);
float ina219Reading_mA = 1000;
float extMeterReading_mA = 1000;
void setup(){
while (!ina219.begin()) {
Serial.println("INA219 初始化失败:请检查I2C接线/地址是否正确");
delay(1000);
}
ina219.linearCalibrate(ina219Reading_mA, extMeterReading_mA);
Serial.begin(9600);
}
void loop(){
Serial.println(String("总线电压:") + String(ina219.getBusVoltage_V()));
Serial.println(String("分流电压:") + String(ina219.getShuntVoltage_mV()));
Serial.println(String("电流值:") + String(ina219.getCurrent_mA()));
Serial.println(String("功率值") + String(ina219.getPower_mW()));
Serial.println(String("------------------"));
delay(500);
}6、ESP32 Python 예제(Mixly IDE /미스키에 적용됨)
개발 보드를 선택하세요 Python ESP32 【ESP32 Generic(4MB)】를 코드 모드로 전환하여 업로드하십시오
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미시지(Mixly)IDE ESP32 라이브러리 다운로드 및 가져오기 가이드:点击查看
예제 프로그램(ESP32-Python):
from machine import I2C, Pin
import time
INA219_REG_CONFIG = 0x00
INA219_REG_SHUNTVOLTAGE = 0x01
INA219_REG_BUSVOLTAGE = 0x02
INA219_REG_POWER = 0x03
INA219_REG_CURRENT = 0x04
INA219_REG_CALIBRATION = 0x05
INA219_CONFIG_RESET = 0x8000
INA219_I2C_ADDRESS1 = 0x40
INA219_I2C_ADDRESS2 = 0x41
INA219_I2C_ADDRESS3 = 0x44
INA219_I2C_ADDRESS4 = 0x45
class eIna219BusVolRange_t:
eIna219BusVolRange_16V = 0x0000
eIna219BusVolRange_32V = 0x2000
class eIna219PGABits_t:
eIna219PGABits_1 = 0x0000
eIna219PGABits_2 = 0x0800
eIna219PGABits_4 = 0x1000
eIna219PGABits_8 = 0x1800
class eIna219AdcBits_t:
eIna219AdcBits_9 = 0
eIna219AdcBits_10 = 1
eIna219AdcBits_11 = 2
eIna219AdcBits_12 = 3
class eIna219AdcSample_t:
eIna219AdcSample_1 = 0x00
eIna219AdcSample_2 = 0x01
eIna219AdcSample_4 = 0x02
eIna219AdcSample_8 = 0x03
eIna219AdcSample_16 = 0x04
eIna219AdcSample_32 = 0x05
eIna219AdcSample_64 = 0x06
eIna219AdcSample_128 = 0x07
class eInaMode_t:
eIna219PowerDown = 0x00
eIna219SVolTrig = 0x01
eIna219BVolTrig = 0x02
eIna219SAndBVolTrig = 0x03
eIna219AdcOff = 0x04
eIna219SVolCon = 0x05
eIna219BVolCon = 0x06
eIna219SAndBVolCon = 0x07
class HELLO_STEM_INA219:
def __init__(self, i2c_bus, i2c_addr=INA219_I2C_ADDRESS1):
self._i2c = i2c_bus
self._addr = i2c_addr
self.calValue = 0x0000
self.lastOperateStatus = 'eIna219_InitError'
def _writeReg(self, reg, data):
try:
buffer = bytearray([reg, (data >> 8) & 0xFF, data & 0xFF])
self._i2c.writeto(self._addr, buffer)
self.lastOperateStatus = 'eIna219_ok'
except Exception:
self.lastOperateStatus = 'eIna219_WriteRegError'
def _readReg(self, reg):
try:
self._i2c.writeto(self._addr, bytearray([reg]))
buffer = self._i2c.readfrom(self._addr, 2)
self.lastOperateStatus = 'eIna219_ok'
return (buffer[0] << 8) | buffer[1]
except Exception:
self.lastOperateStatus = 'eIna219_ReadRegError'
return 0
def _readInaReg(self, reg):
value = self._readReg(reg)
if value & 0x8000:
return value - 0x10000
return value
def _readInaRegUnsigned(self, reg):
return self._readReg(reg)
def _writeInaReg(self, reg, value):
self._writeReg(reg, value)
def scan(self):
try:
self._i2c.writeto(self._addr, bytearray([]))
return True
except OSError as e:
if str(e) == '[Errno 5] EIO':
return False
return False
def begin(self):
self.lastOperateStatus = 'eIna219_InitError'
if self.scan():
self.setBRNG(eIna219BusVolRange_t.eIna219BusVolRange_32V)
self.setPGA(eIna219PGABits_t.eIna219PGABits_8)
self.setBADC(eIna219AdcBits_t.eIna219AdcBits_12, eIna219AdcSample_t.eIna219AdcSample_8)
self.setSADC(eIna219AdcBits_t.eIna219AdcBits_12, eIna219AdcSample_t.eIna219AdcSample_8)
self.setMode(eInaMode_t.eIna219SAndBVolCon)
self.calValue = 4096
self._writeInaReg(INA219_REG_CALIBRATION, self.calValue)
self.lastOperateStatus = 'eIna219_ok'
return True
else:
return False
def linearCalibrate(self, ina219Reading_mA, extMeterReading_mA):
if ina219Reading_mA == 0:
return
new_calValue = int((extMeterReading_mA / ina219Reading_mA) * self.calValue) & 0xFFFE
self.calValue = new_calValue
self._writeInaReg(INA219_REG_CALIBRATION, self.calValue)
def getBusVoltage_V(self):
reg_val = self._readInaRegUnsigned(INA219_REG_BUSVOLTAGE)
return float(reg_val >> 3) * 0.004
def getShuntVoltage_mV(self):
reg_val = self._readInaReg(INA219_REG_SHUNTVOLTAGE)
return float(reg_val) * 0.01
def getCurrent_mA(self):
return float(self._readInaReg(INA219_REG_CURRENT))
def getPower_mW(self):
return float(self._readInaReg(INA219_REG_POWER)) * 20.0
def setBRNG(self, value):
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x2000
conf |= value
self._writeInaReg(INA219_REG_CONFIG, conf)
def setPGA(self, bits):
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x1800
conf |= bits
self._writeInaReg(INA219_REG_CONFIG, conf)
def _get_adc_value(self, bits, sample):
if bits < eIna219AdcBits_t.eIna219AdcBits_12 and sample > eIna219AdcSample_t.eIna219AdcSample_1:
return -1
if bits < eIna219AdcBits_t.eIna219AdcBits_12:
return bits
else:
return 0x08 | sample
def setBADC(self, bits, sample):
value = self._get_adc_value(bits, sample)
if value == -1:
return
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x0780
conf |= value << 7
self._writeInaReg(INA219_REG_CONFIG, conf)
def setSADC(self, bits, sample):
value = self._get_adc_value(bits, sample)
if value == -1:
return
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x0078
conf |= value << 3
self._writeInaReg(INA219_REG_CONFIG, conf)
def setMode(self, mode):
conf = self._readInaRegUnsigned(INA219_REG_CONFIG)
conf &= ~0x0007
conf |= mode
self._writeInaReg(INA219_REG_CONFIG, conf)
def reset(self):
self._writeInaReg(INA219_REG_CONFIG, INA219_CONFIG_RESET)
i2c = I2C(1, scl=Pin(22), sda=Pin(21), freq=400000)
sensor = HELLO_STEM_INA219(i2c, i2c_addr=INA219_I2C_ADDRESS4)
if sensor.begin():
print("INA219 初始化成功!")
else:
print("INA219 初始化失败,请检查接线和地址!")
import machine
while True:
print(('总线电压:' + str(sensor.getBusVoltage_V())))
print(('分流电压:' + str(sensor.getShuntVoltage_mV())))
print(('电流: ' + str(sensor.getCurrent_mA())))
print(('功率: ' + str(sensor.getPower_mW())))
time.sleep(1)
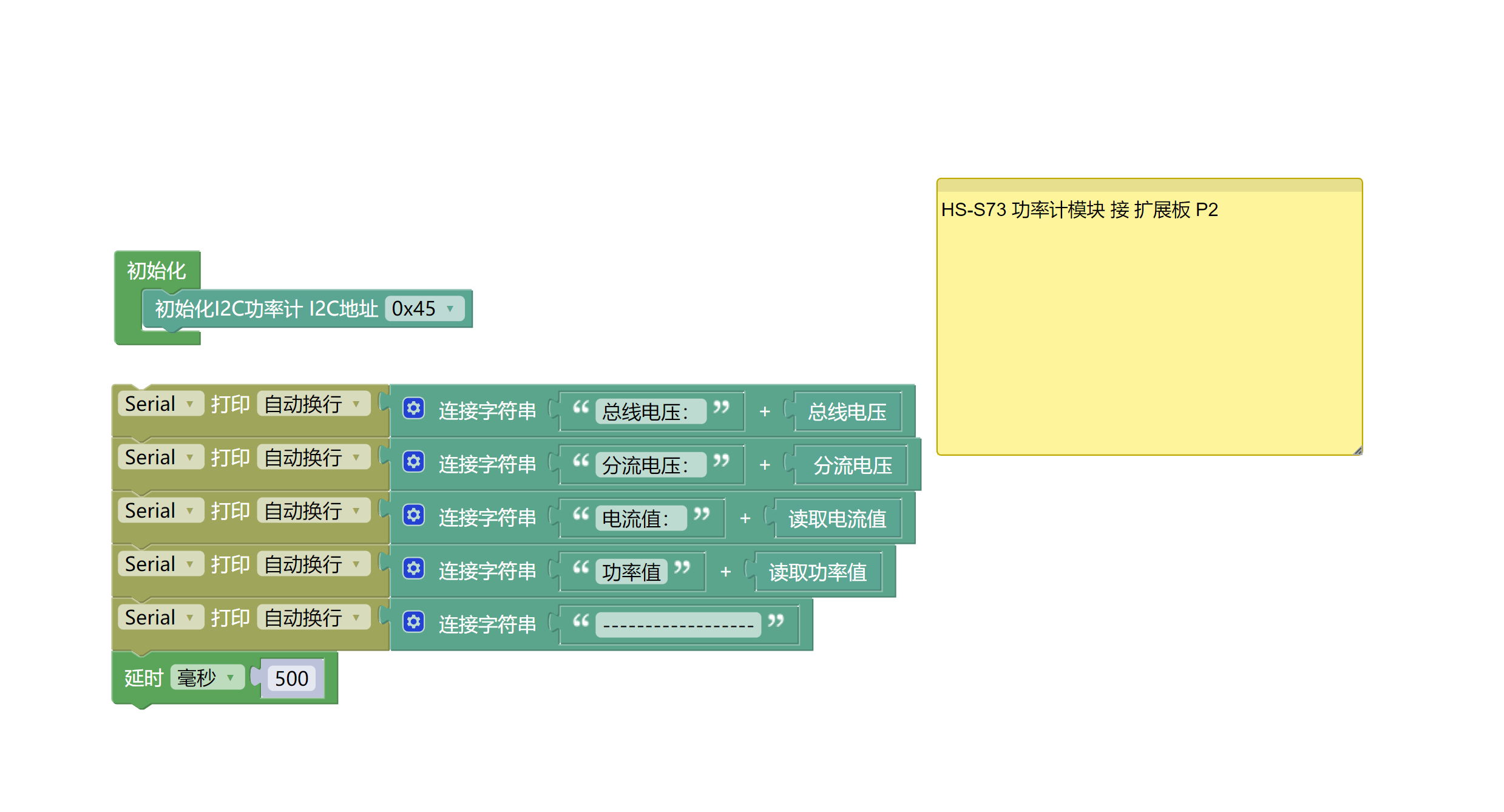
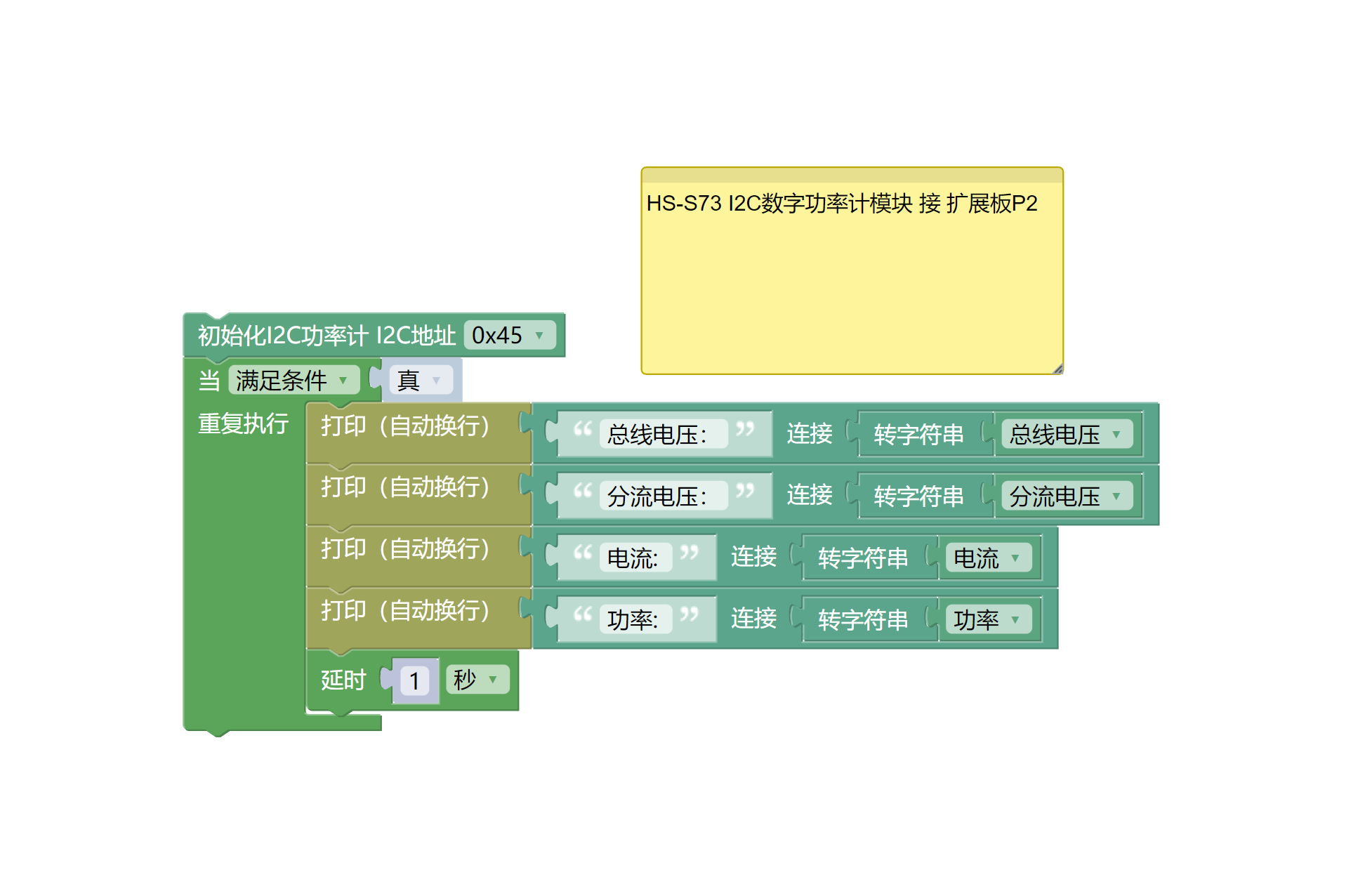
7、미스키 Mixly 예제 프로그램(그래픽 언어)
예제 프로그램(UNO 개발 보드):다운로드 클릭
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미스키(Mixly)IDE Arduino 라이브러리 다운로드 및 가져오기 가이드:点击查看
예제 프로그램(ESP32 개발 보드):다운로드 클릭
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미시지(Mixly)IDE ESP32 라이브러리 다운로드 및 가져오기 가이드:点击查看
8、테스트 환경 구축
Arduino UNO 테스트 환경 구축
부품 준비:“
UNO-R3 개발 보드 *1
UNO-R3 EXP 확장판 *1
USB type-c 데이터 케이블 *1
HS-S73-P I2C 디지털 파워 메터 모듈 *1
LED 랜턴 모듈 *1
PH2.0 4P둘쪽 머리 끝 케이블 *1
전기 연결도):
9、비디오 강의
비디오 강의:点击查看
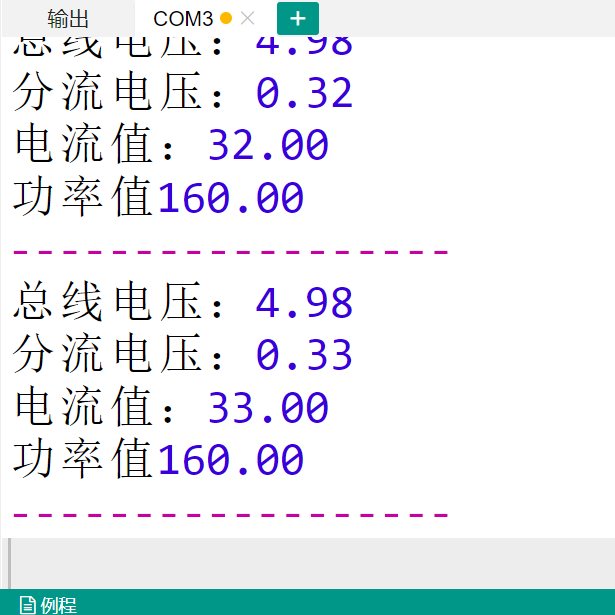
10、테스트 결과
Arduino UNO 테스트 결과:
总线전압, 분류전압, 전류치, 전력치를 보여주는 시리얼 포트를 발견했습니다.
ESP32 테스트 결과:
업데이트 대기 중...