

1、Einführung
2、Schemazeichnung
Drehzahlsensor-HS-S58P SchaltplanKlicken Sie zum Anzeigen
3、Modulparameter
Pinbezeichnung | Beschreibung |
|---|---|
G | GND(Spannungsversorgungsminus) |
V | VCC(Spannungsversorgungsplus) |
S | Mikrocontroller-Signalanschluss |
Spannungsversorgung: 3.3V / 5V
Verbindungsart: PH2.0 Steckerkabel
Montageart: Doppelbolzenfixierung
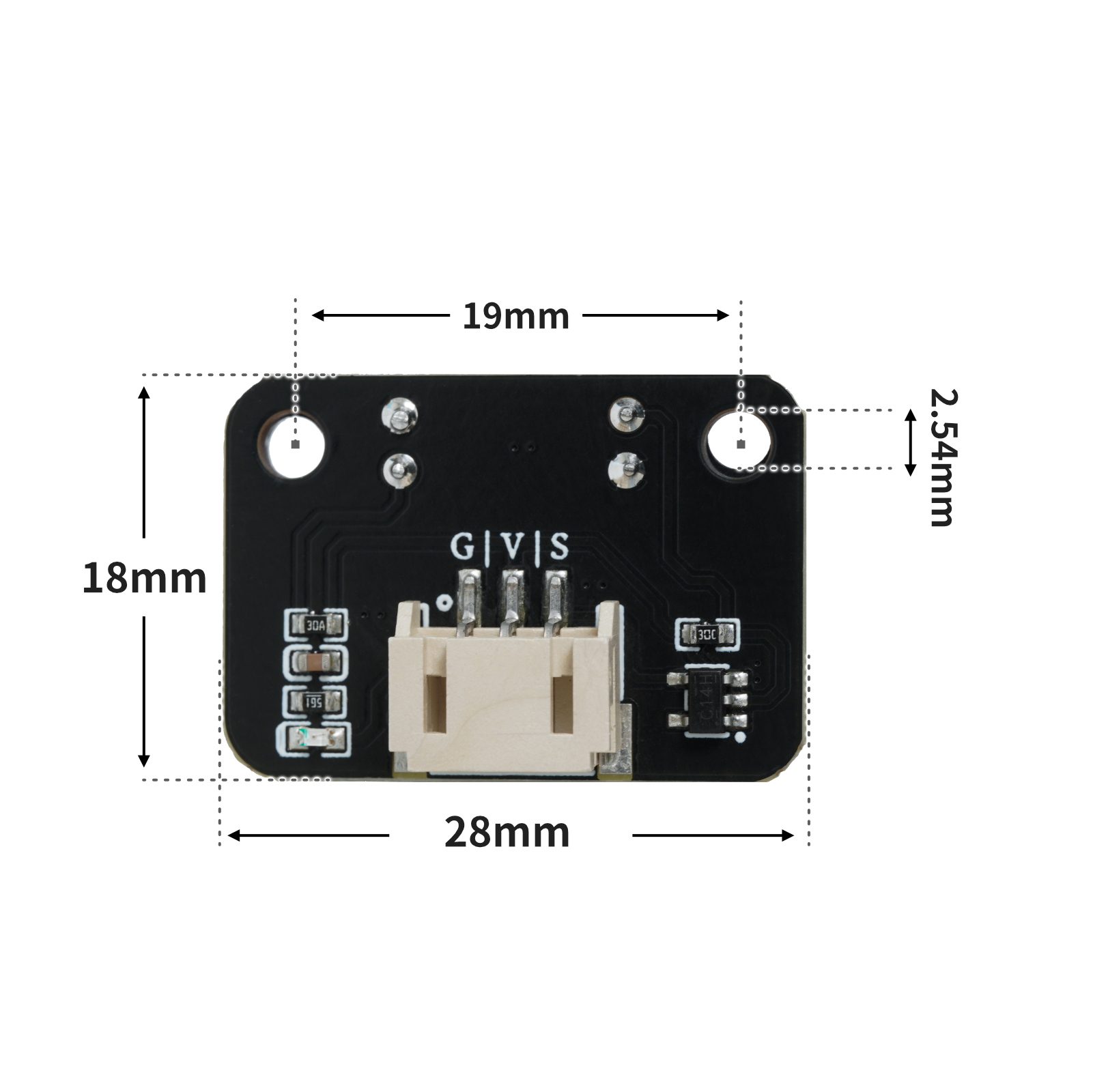
4, Platinegröße
5、Arduino IDE Beispielprogramm
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
Anleitung zum Herunterladen und Importieren der Bibliotheksdateien für das Arduino IDE:Klicken Sie zum Anzeigen
Beispielprogramm (UNO-Entwicklerboard):
volatile float Val;
volatile float time;
volatile float Speed;
volatile float Speed1;
volatile float Val1;
void attachInterrupt_fun_CHANGE_2() {
count();
}
void count() {
Val = Val + 1;
}
void setup(){
Serial.begin(9600);
Val = 0;
time = 0;
Speed = 0;
Speed1 = 0;
Val1 = 0;
pinMode(2, INPUT);
attachInterrupt(digitalPinToInterrupt(2),attachInterrupt_fun_CHANGE_2,CHANGE);
}
void loop(){
//电机测速:20孔码盘,单位转/分
String("转速:") + String(Speed);
time = millis();
Speed = (Val / 40) / (time / 60000);
Serial.println(digitalRead(2));
}
6、ESP32 Python Beispiel (für Mixly IDE /米思齐)
Entwicklungsboard auswählen Python ESP32 [ESP32 Generic(4MB)] auf den Code-Modus umschalten und hochladen
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
示例程序(ESP32-Python):
import machine
import time
def attachInterrupt_func(x):
global val
val = val + 1
pass
val = 0
pin2 = machine.Pin(2, machine.Pin.OUT)
pin4 = machine.Pin(4, machine.Pin.OUT)
machine.Pin(12).irq(handler = attachInterrupt_func, trigger = (machine.Pin.IRQ_RISING | machine.Pin.IRQ_FALLING))
pin2.value(1)
pin4.value(1)
t = float(0)
speed = float(0)
while True:
t = time.ticks_ms()
speed = (val / 40) / (t / 60000)
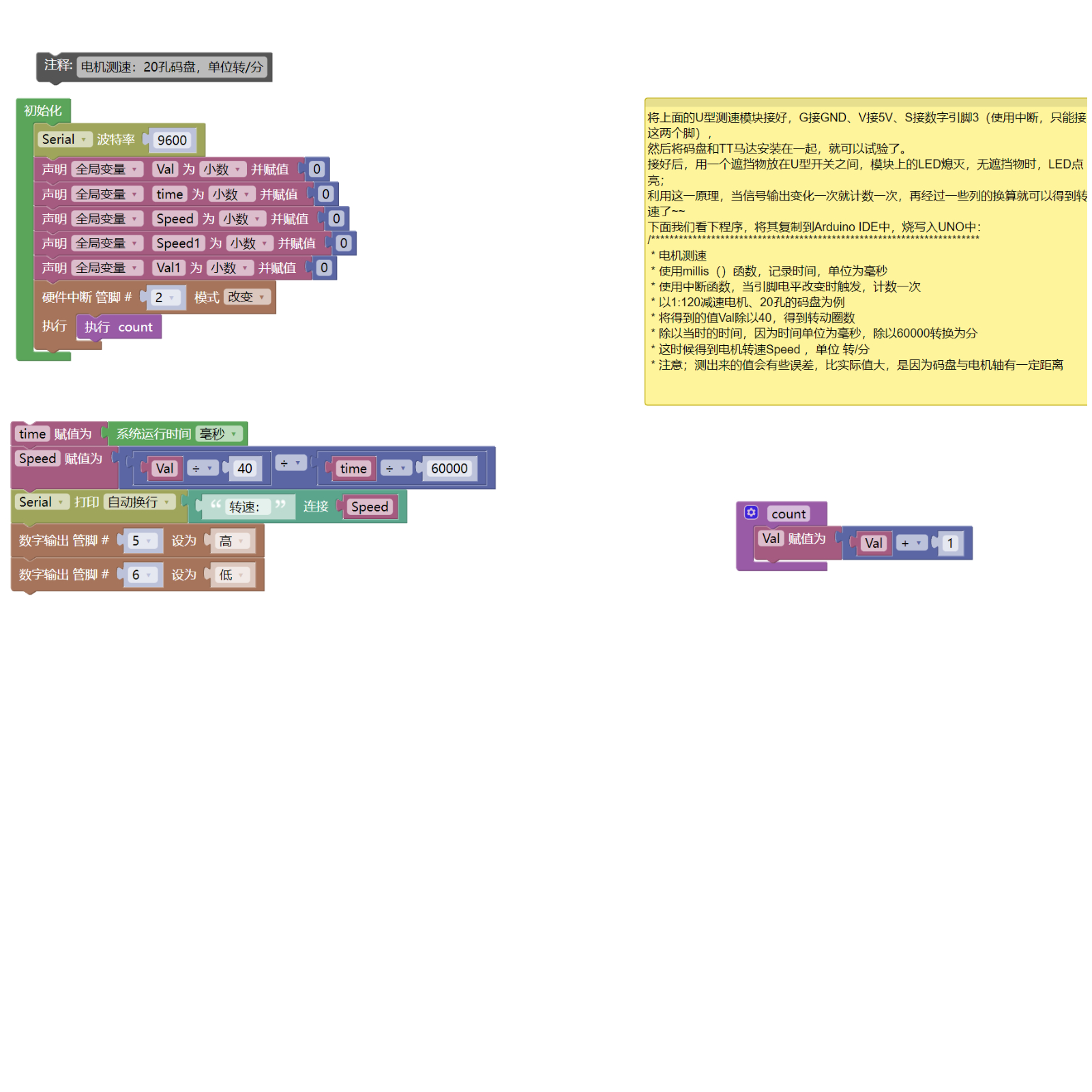
print(speed)7、米思齐 Mixly 示例程序(图形化语言) in Deutsch
Beispielprogramm (UNO-Entwicklerboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE Arduino库文件下载及导入教程:Klicken Sie zum Anzeigen
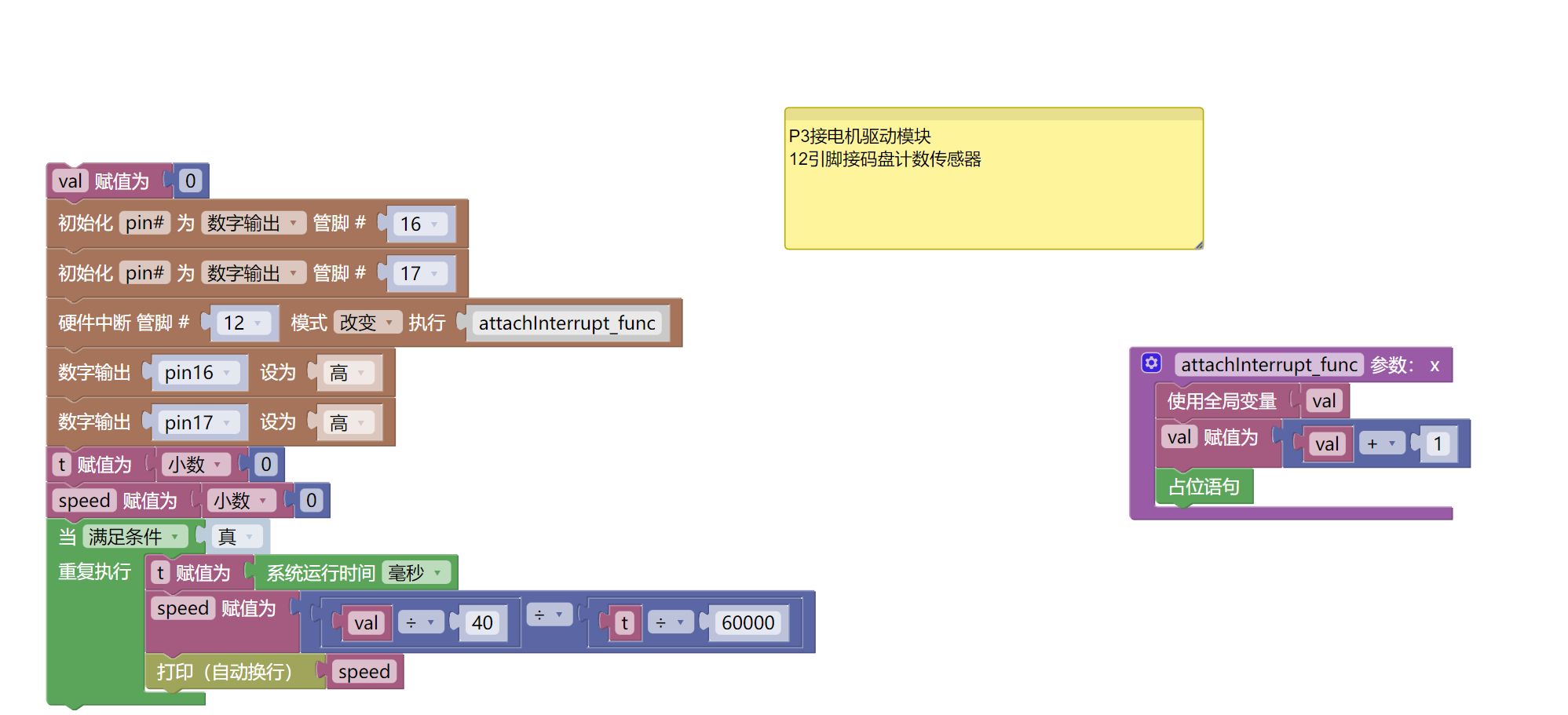
Beispielprogramm (ESP32-Entwicklungsboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
8、Testumgebung Einrichtung
Testumgebung für Arduino UNO einrichten
Vorbereiten Sie die Komponenten:
HELLO STEM UNO R3 Entwicklungsplatine *1
HELLO STEM UNO EXP1 Erweiterungsplatte *1
USB type-c Datenkabel *1
Code-Wählsensor (HS-S58P) *1
Motorsteuerungsmodul (HS-F04P) *1
PH2.0 3P-Doppelseitige Steckerleitung *2 oder PH2.0 3P-Stecker auf DuPont-Kabel umstecken *2
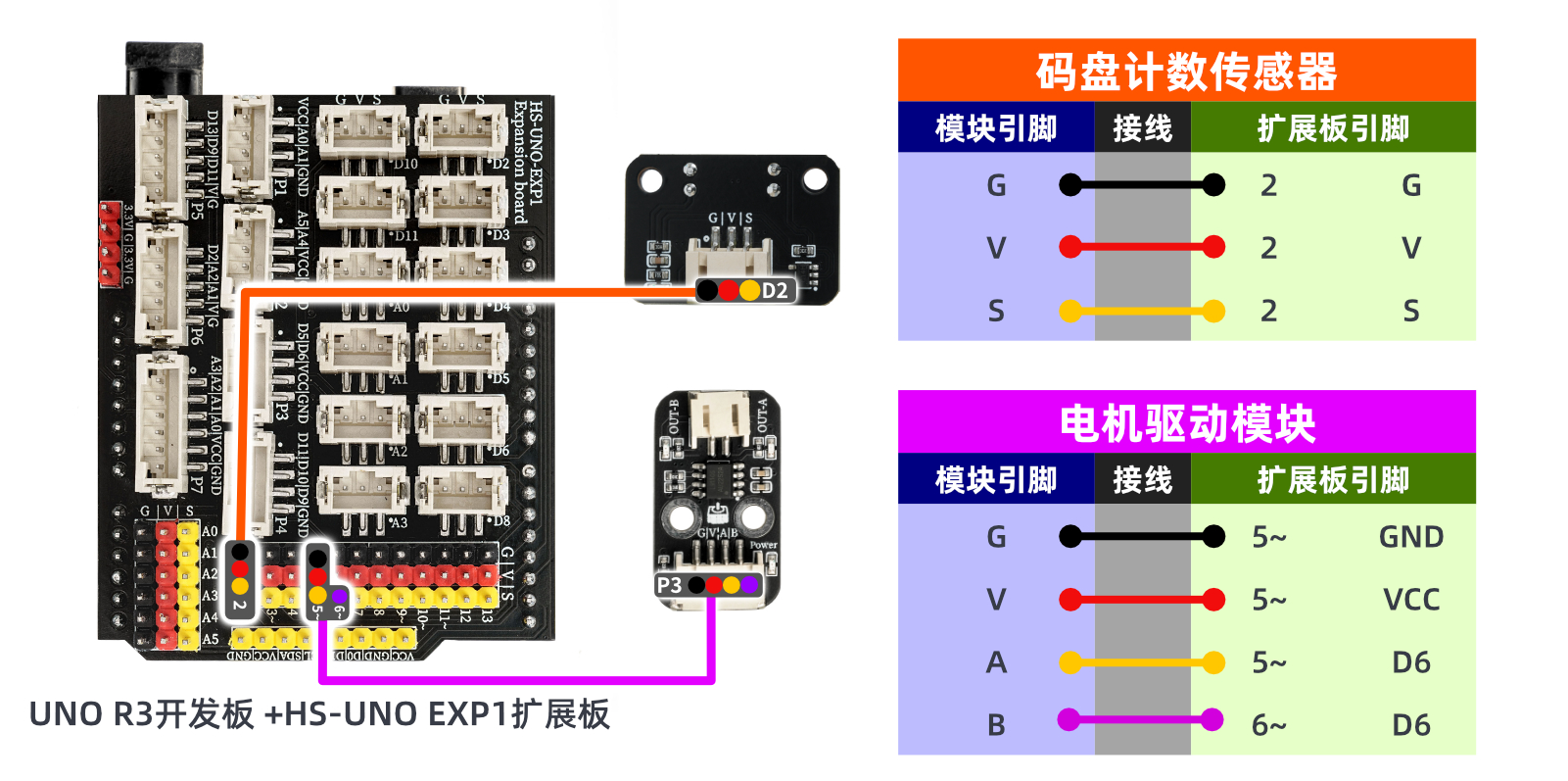
Schaltplan der Leitung:
ESP32 Testumgebung einrichten
Vorbereiten Sie die Komponenten:Wird aktualisiert...
Schaltplan der Leitung:Wird aktualisiert...
9、Video-Tutorial
Video-Tutorial:Klicken Sie zum Anzeigen
10、Testergebnis
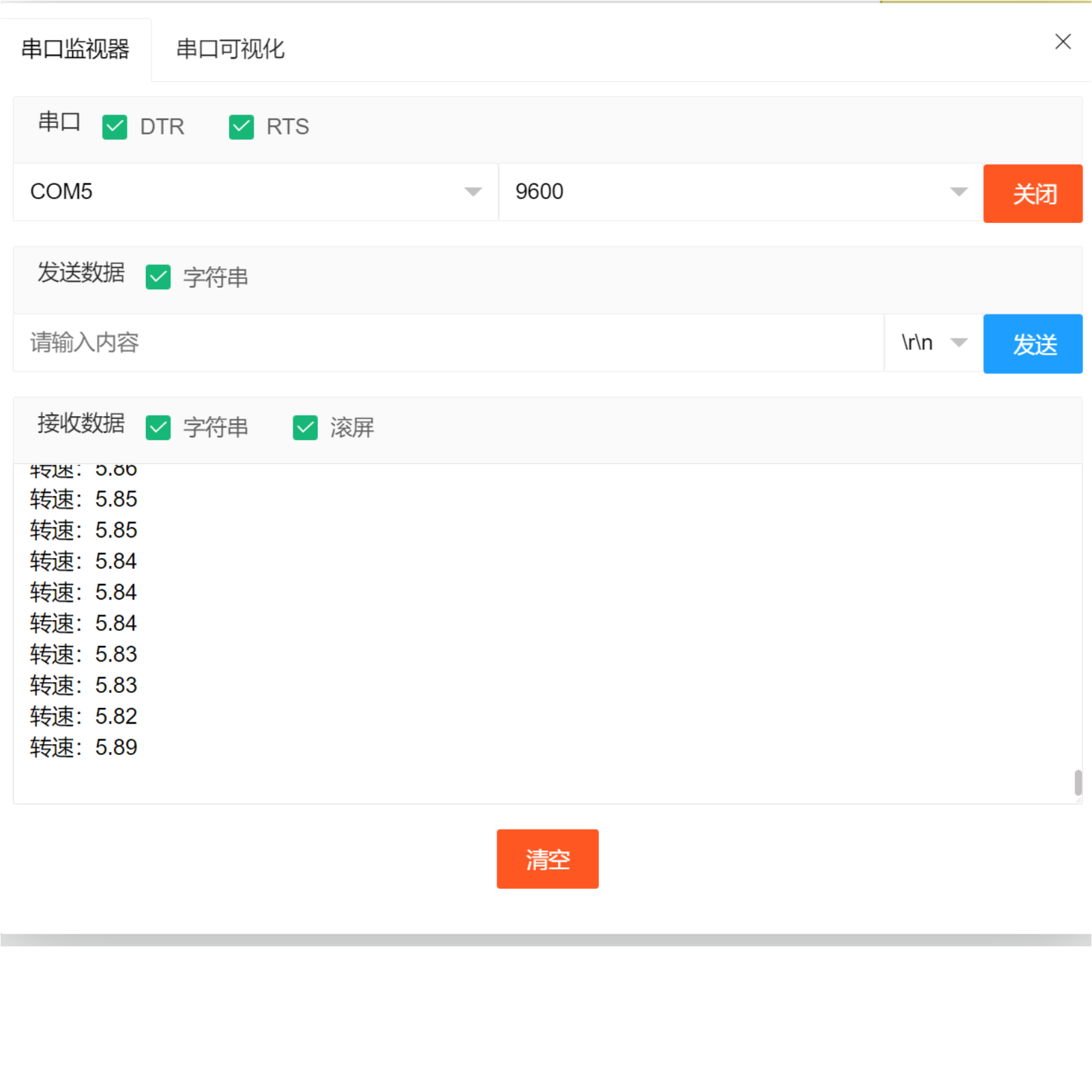
Arduino UNO Testergebnis:
Nachdem die Kabel an den Bauteil angeschlossen sind, kopieren Sie das obige Programm auf die UNO-R3PRO-Entwicklungsplatine und schalten Sie den Strom ein.Das Serialport-Monitor öffnen, wenn der Zähler-Sensor des Tachosignals einen Stoßsensor erkennt, können Sie die Drehzahldaten sehen.
ESP32 Testergebnis:
Wird aktualisiert...