

1、Einführung
Der MPU6050-Gyroskopmodul ist ein hocheffizientes Sechskanal-Sensor-Modul mit dreiaxialer Beschleunigung und dreiaxialer Gyroskop, das den MPU6050-Chip als Kern verwendet und MPU-6050 ein 6-Achsen-Bewegungssensor ist.Es integriert einen 3-Achsen-MEMS-Gyro, einen 3-Achsen-MEMS-Accelerometer und einen erweiterbaren digitalen Bewegungsprozessor DMP.Um es zu verwenden, bedeutet, die Neigungswinkel (Pitch, Roll, Yaw) des zu testenden Objekts (z.B. Quadrocopter, Gleichgewichtswagen) in den Achsen x, y, z zu erhalten.Wir lesen die sechs Daten des MPU6050 über I2C aus (Dreiachsensbeschleunigung AD-Werte, Dreiachsengeschwindigkeit AD-Werte) und erhalten nach der Stellungsfusion die Winkel Pitch, Roll und Yaw.Mit dem integrierten digitalen Bewegungsprozessor DMP werden die nach der Attitudalkalibrierung ausgegebenen Daten über den I2C-Anschluss ausgegeben.Klein im Volumen, leicht zu verwenden und mit vielen Vorteilen.Modul verfügt über 2 Positionslöcher, was die Montage auf anderen Geräten erleichtert.
2、Schemazeichnung
MPU6050 Gyroskopmodul-HS-S48P SchaltplanKlicken Sie zum Anzeigen
3、Modulparameter
Pinbezeichnung | Beschreibung |
|---|---|
GND | GND(Spannungsversorgungsminus) |
VCC | VCC(Spannungsversorgungsplus) |
SDA | Datenübertragungsstecker |
SCL | Kommunikationszeitsignalleitung |
Spannungsversorgung: 3.3V - 5V
Verbindungsmethode: PH2.0 4P Steckerkabel
Montageart: Schraubenfestigung
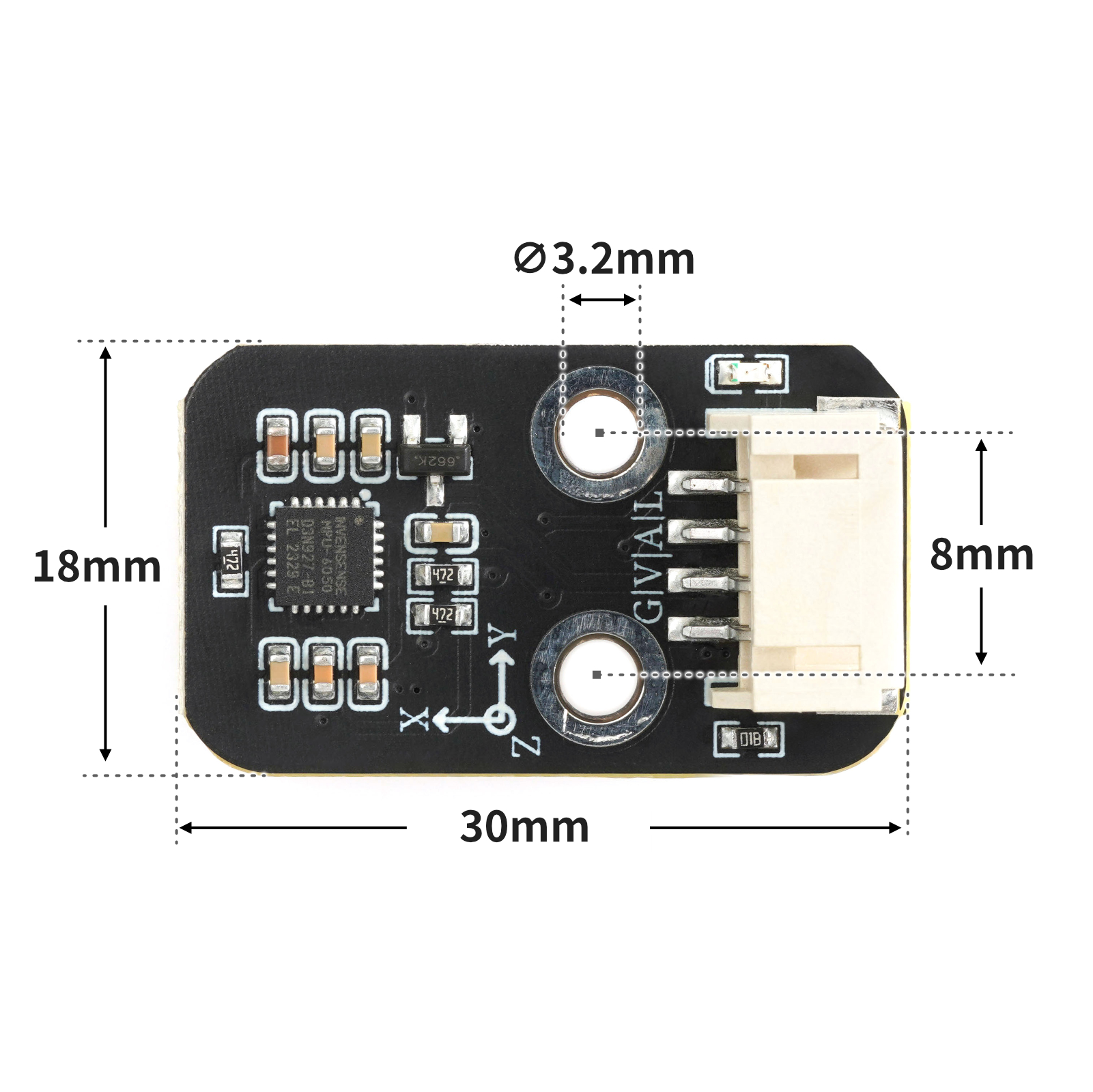
4, Platinegröße
5、Arduino IDE Beispielprogramm
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
Anleitung zum Herunterladen und Importieren der Bibliotheksdateien für das Arduino IDE:Klicken Sie zum Anzeigen
Beispielprogramm (UNO-Entwicklerboard):
#include <MPU6050_tockn.h>
#include <Wire.h>
MPU6050 mpu6050(Wire);
void setup(){
Serial.begin(9600);
Wire.begin();
mpu6050.begin();
mpu6050.calcGyroOffsets(true);
}
void loop(){
//读取MPU6050数据\n连接方式:MPU6050连接主控板的IIC接口
mpu6050.update();
Serial.print("\nX轴加速度:");
Serial.print(mpu6050.getAccX());
Serial.print("\tY轴加速度:");
Serial.print(mpu6050.getAccY());
Serial.print("\tZ轴加速度:");
Serial.println(mpu6050.getAccZ());
Serial.print("X轴角度:");
Serial.print(mpu6050.getAngleX());
Serial.print("\tY轴角度:");
Serial.print(mpu6050.getAngleY());
Serial.print("\tZ轴角度:");
Serial.println(mpu6050.getAngleZ());
Serial.print("温度:");
Serial.println(mpu6050.getTemp());
Serial.print("###############################################");
delay(1000);
}6、ESP32 Python Beispiel (für Mixly IDE /米思齐)
Entwicklungsboard auswählen Python ESP32 [ESP32 Generic(4MB)] auf den Code-Modus umschalten und hochladen
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
示例程序(ESP32-Python):
import mpu6050
import machine
import time
# 请勿修改变量
i2c_extend = machine.SoftI2C(scl = machine.Pin(22), sda = machine.Pin(21), freq = 100000)
# 请勿修改变量
# 初始化语句请勿修改里面的变量
accel = mpu6050.accel(i2c_extend)
while True:
# 获传感器数据语句,请勿修改里面的变量。获取的值为字典类型
print(accel.get_values())
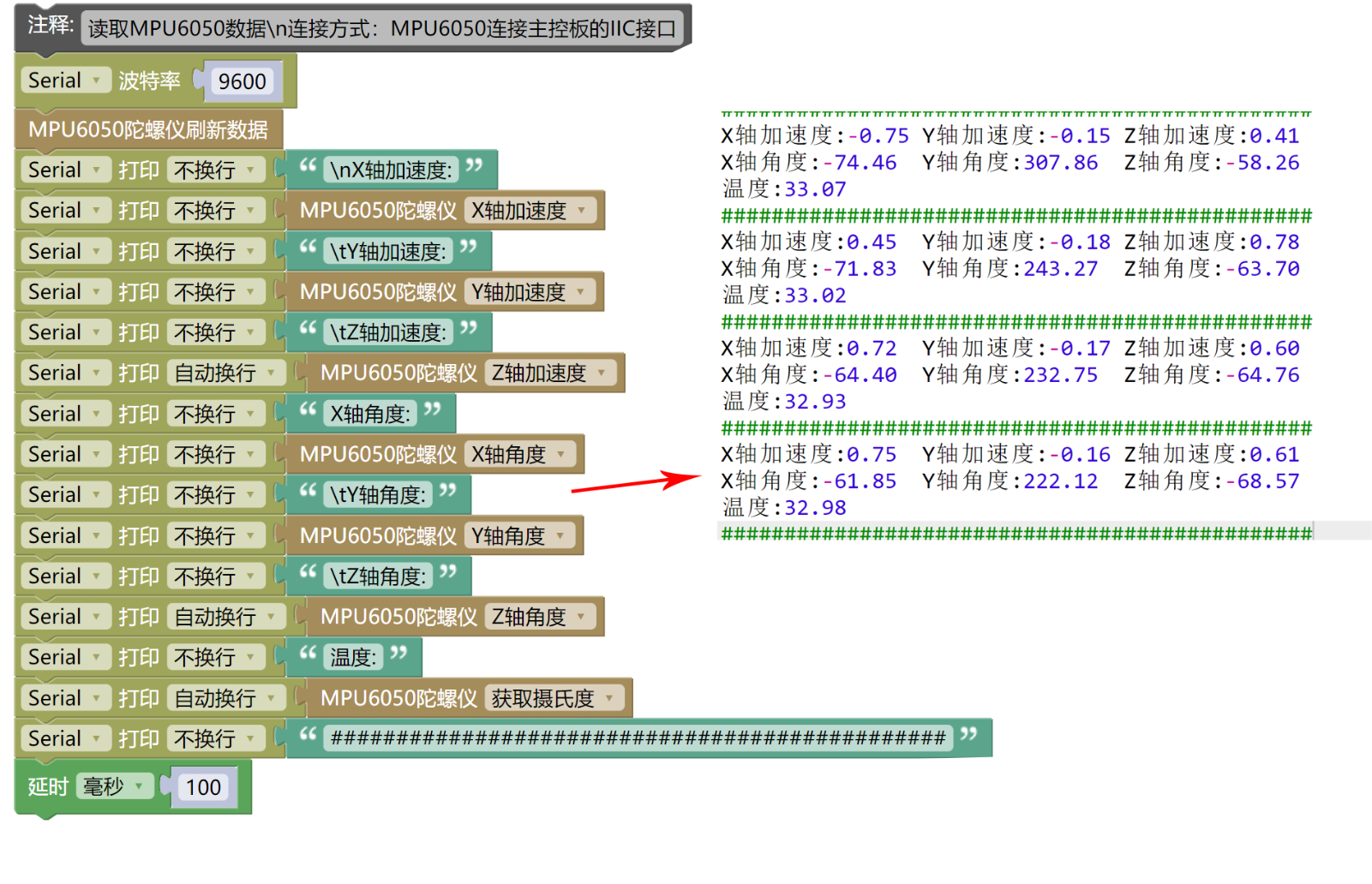
time.sleep_ms(300)7、米思齐 Mixly 示例程序(图形化语言) in Deutsch
Beispielprogramm (UNO-Entwicklerboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE Arduino库文件下载及导入教程:Klicken Sie zum Anzeigen
示例程序(ESP32开发板):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
8、Testumgebung Einrichtung
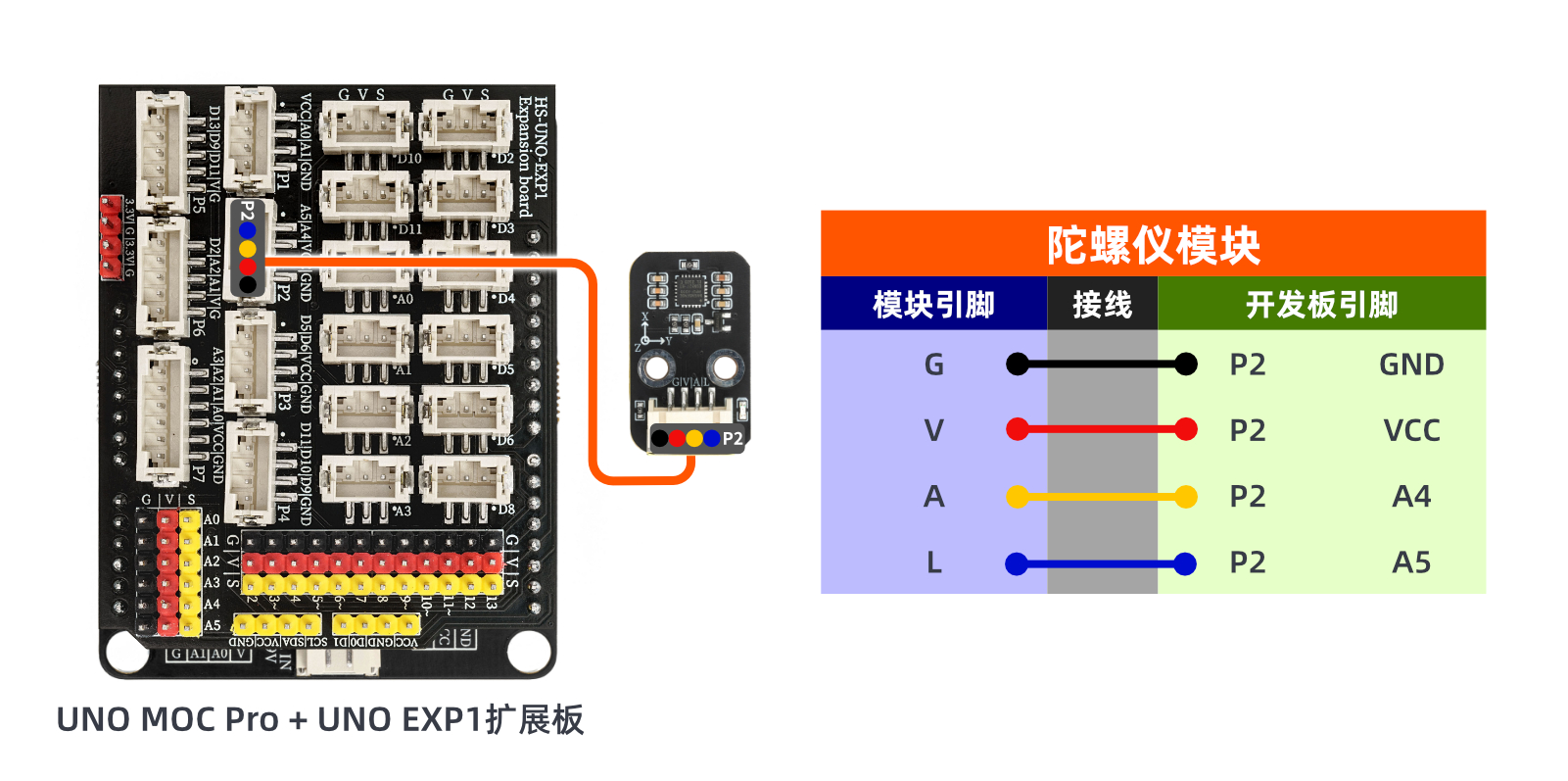
Testumgebung für Arduino UNO einrichten
Vorbereiten Sie die Komponenten:
HELLO STEM UNO R3 Entwicklungsplatine *1
HELLO STEM UNO EXP1 Erweiterungsplatte *1
USB type-c Datenkabel *1
MPU6050 Gyroskopmodul*1
PH2.0 4P Steckerkabel *1
Schaltplan der Leitung:
ESP32 Testumgebung einrichten
Vorbereiten Sie die Komponenten:
ESP32EA MOC Entwicklungsboard *1
ESP32-EXP1 Erweiterungsplatine *1
USB type-c Datenkabel *1
MPU6050 Gyroskopmodul*1
PH2.0 4P Steckerkabel *1
Schaltplan der Leitung:Wird aktualisiert...
9、Video-Tutorial
Video-Tutorial:Klicken Sie zum Anzeigen
10、Testergebnis
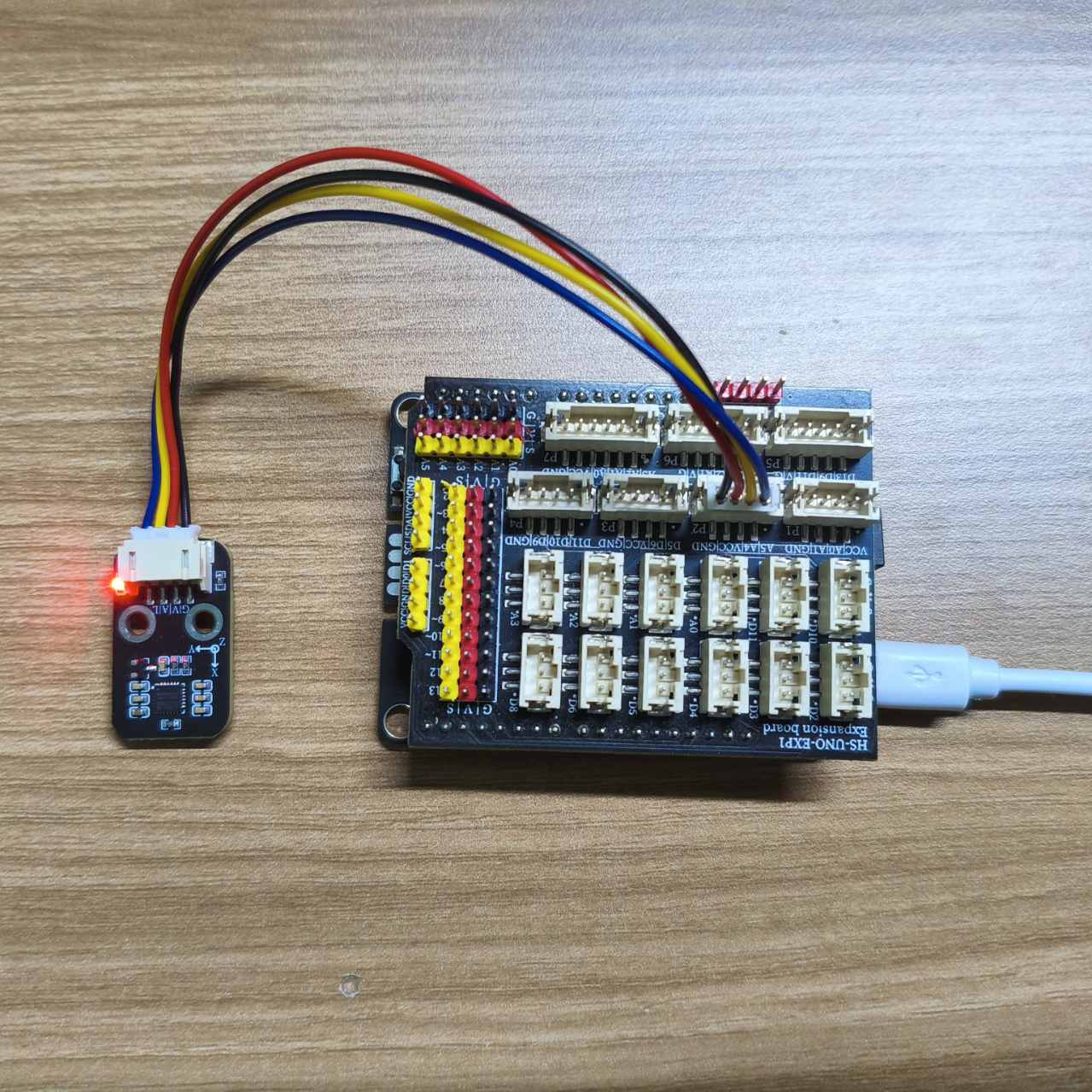
Arduino UNO Testergebnis:
Nachdem die Kabel an den Bauteil angeschlossen sind, laden Sie das obige Programm auf die Entwicklungsplatine hoch, und Sie können die MPU6050-Gyro-Sensor-Modul-Datentests sehen.
ESP32 Testergebnis:
Wird aktualisiert...