

1、Einführung
2、Schemazeichnung
Antriebsplatine-HS-F04-L SchemaKlicken Sie zum Anzeigen
3、Modulparameter
Pinbezeichnung | Beschreibung |
|---|---|
G | GND(Spannungsversorgungsminus) |
V | VCC(Spannungsversorgungsplus) |
INA | Elektromotorsteuerungssignalanschluss A |
INB | Elektromotorsteuerungssignalanschluss B |
Spannungsversorgung: 3.3V / 5V
Verbindungsmethode: PH2.0 Steckerkabel
Montageart: Doppelbolzenfixierung
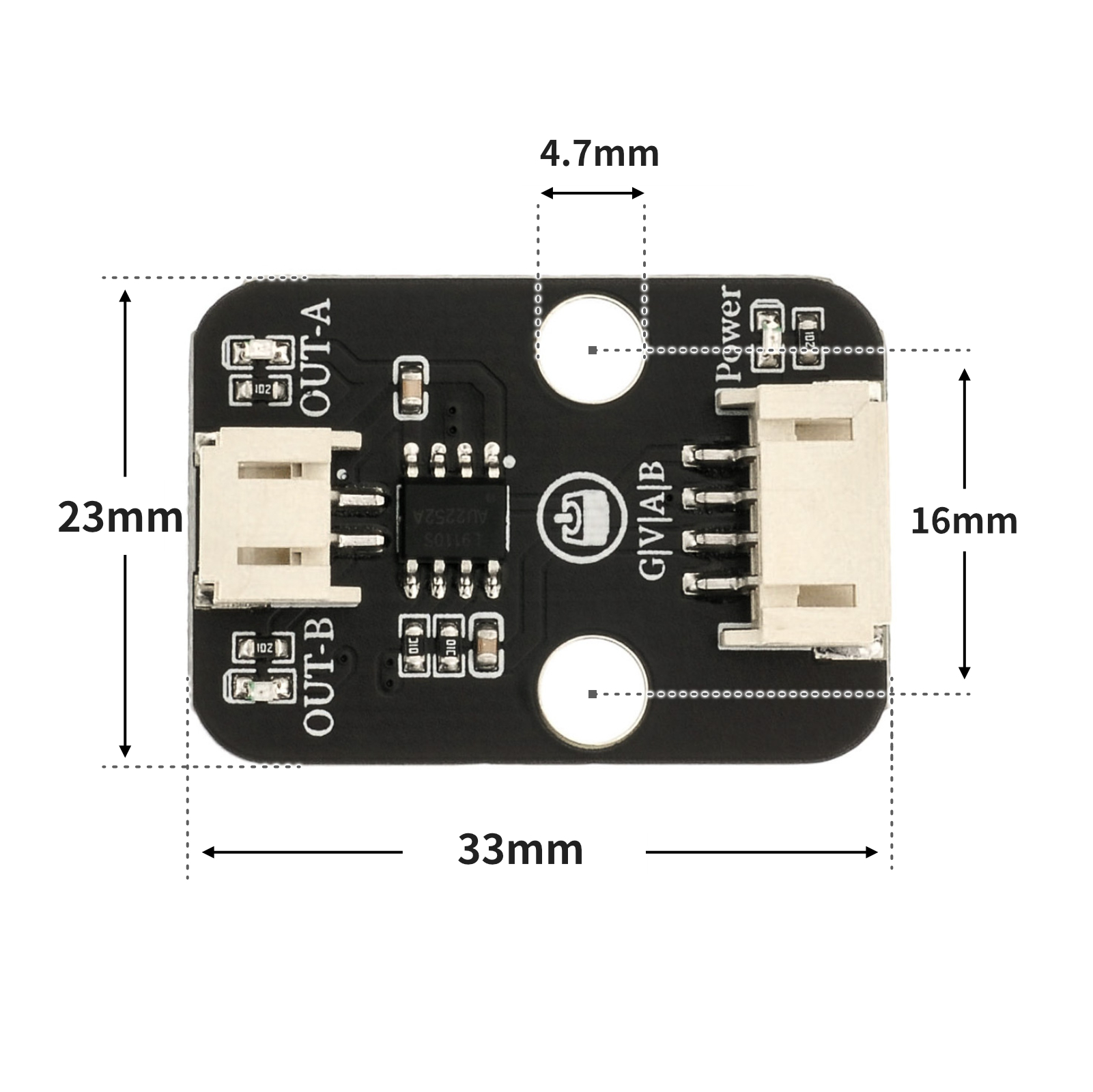
4, Platinegröße
5、Arduino IDE Beispielprogramm
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
Anleitung zum Herunterladen und Importieren der Bibliotheksdateien für das Arduino IDE:Klicken Sie zum Anzeigen
Beispielprogramm (UNO-Entwicklerboard):
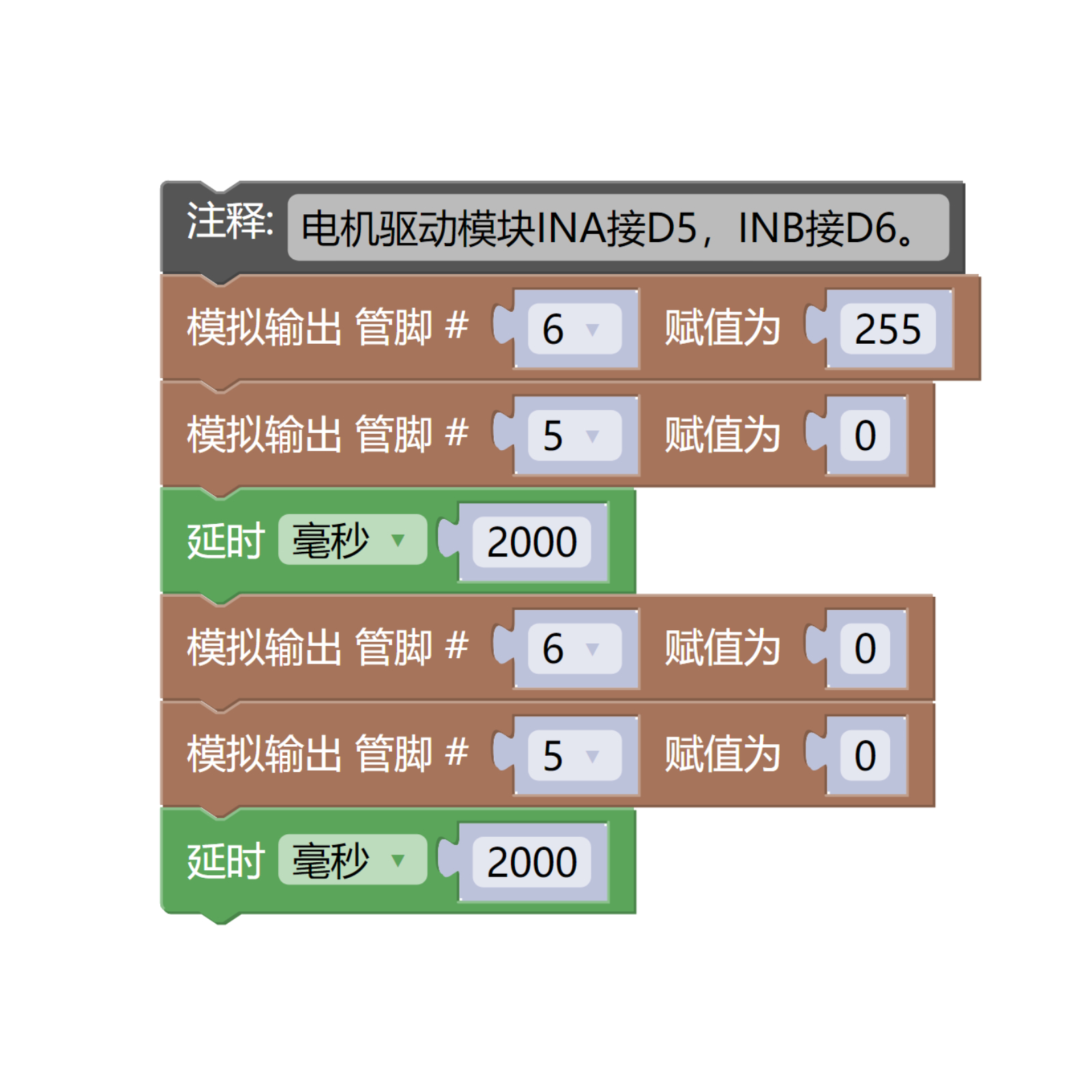
//电机驱动模块INA接D6,INB接D5。
#define INB 5 //定义电机B端口
#define INA 6 //定义电机A端口
void setup() {
pinMode(INB, OUTPUT); //设置电机B端口为输出模式
pinMode(INA, OUTPUT); //设置电机A端口为输出模式
}
void loop() {
analogWrite(INA, 255); //设置电机A端口为高电平,pwm调速范围(0-255)
analogWrite(INB, 0); //设置电机B端口为低电平
delay(2000); //2s之后电机停止
analogWrite(INA, 0); //设置电机A端口为低电平
analogWrite(INB, 0); //设置电机B端口为低电平
delay(2000); //电机反转2s然后正转
}6、ESP32 Python Beispiel (für Mixly IDE /米思齐)
Entwicklungsboard auswählen Python ESP32 [ESP32 Generic(4MB)] auf den Code-Modus umschalten und hochladen
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
示例程序(ESP32-Python):
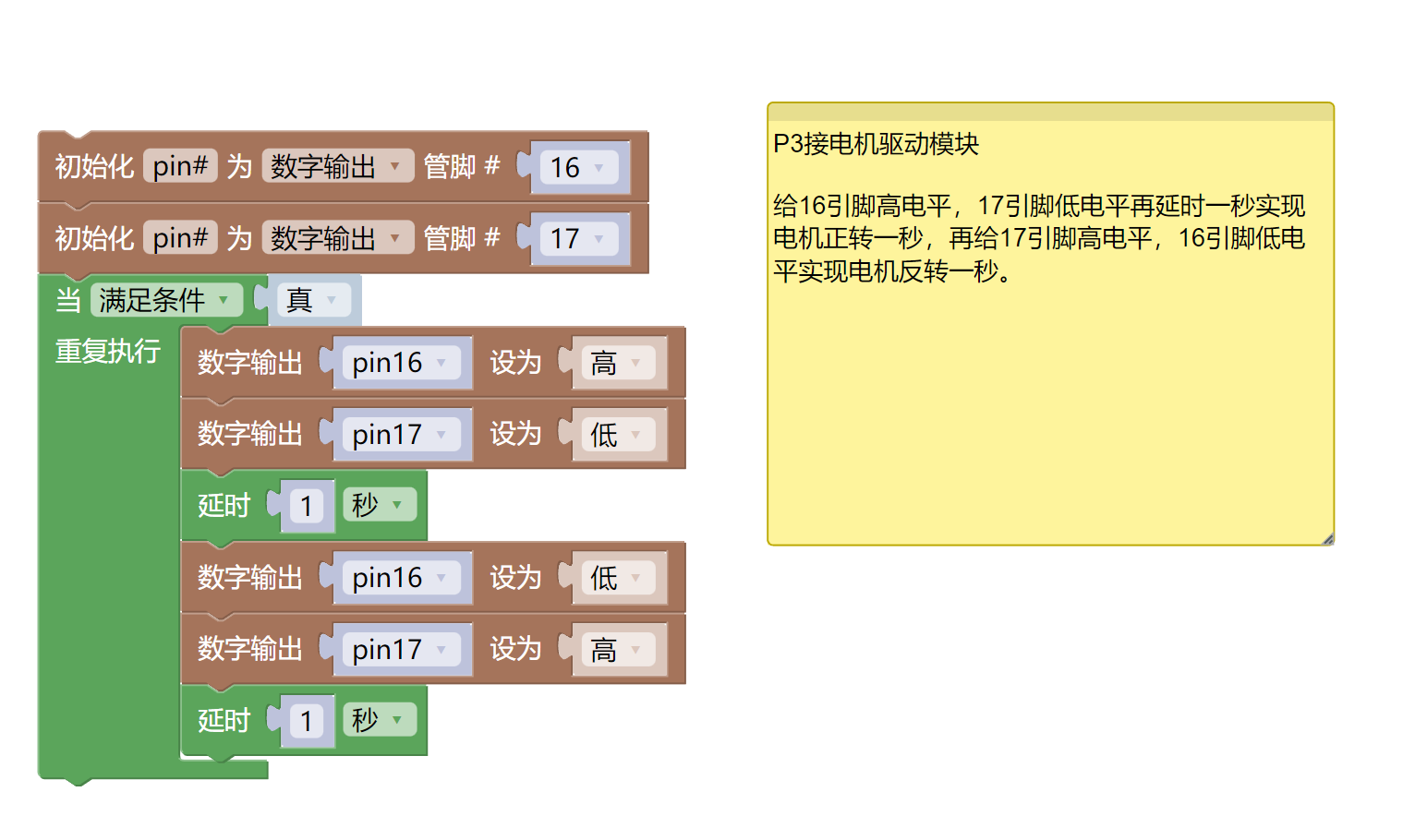
import machine
import time
pin16 = machine.Pin(16, machine.Pin.OUT)
pin17 = machine.Pin(17, machine.Pin.OUT)
while True:
pin16.value(1)
pin17.value(0)
time.sleep(1)
pin16.value(0)
pin17.value(1)
time.sleep(1)7、米思齐 Mixly 示例程序(图形化语言) in Deutsch
Beispielprogramm (UNO-Entwicklerboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE Arduino库文件下载及导入教程:Klicken Sie zum Anzeigen
Beispielprogramm (ESP32-Entwicklungsboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
8、Testumgebung Einrichtung
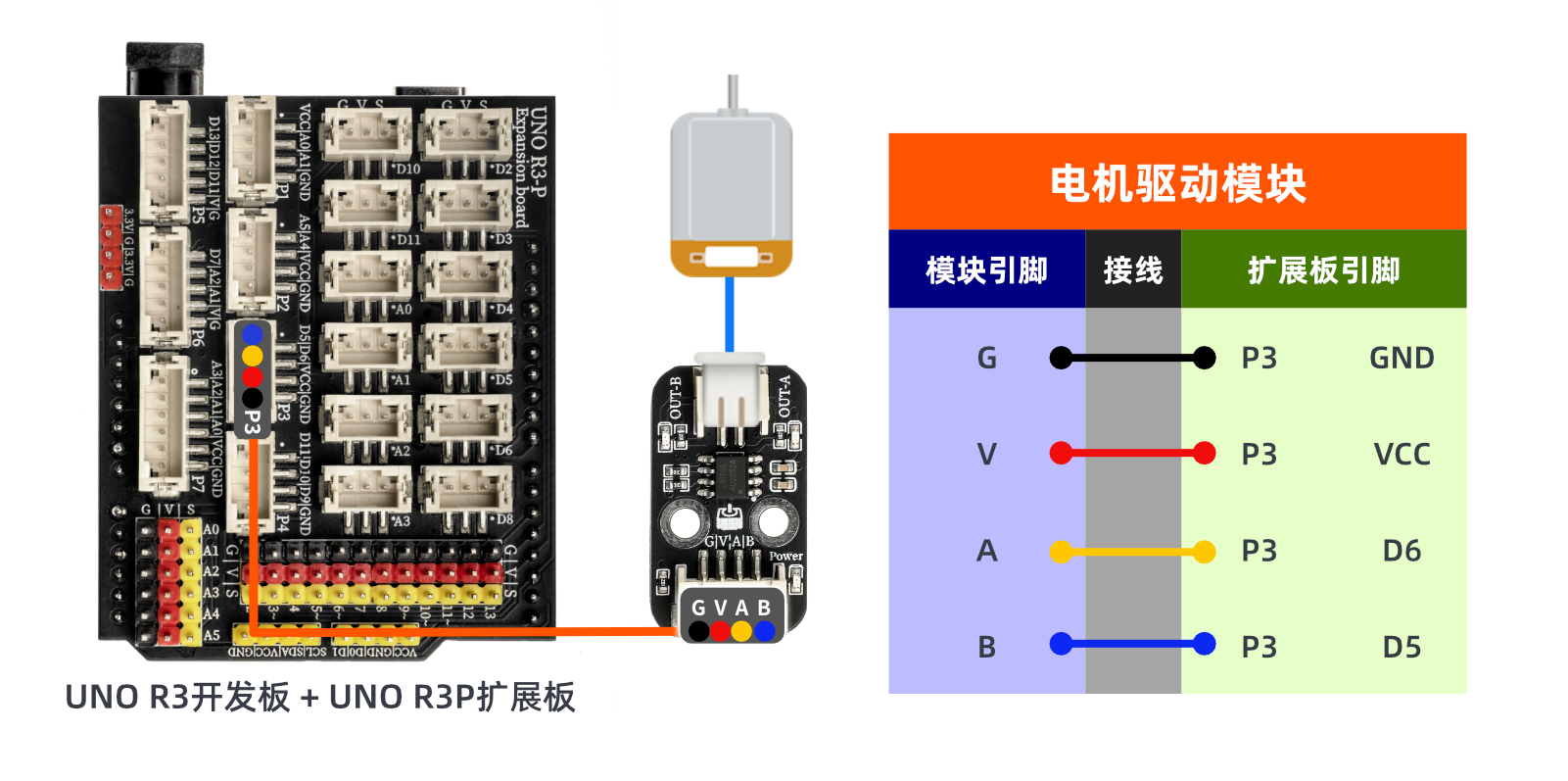
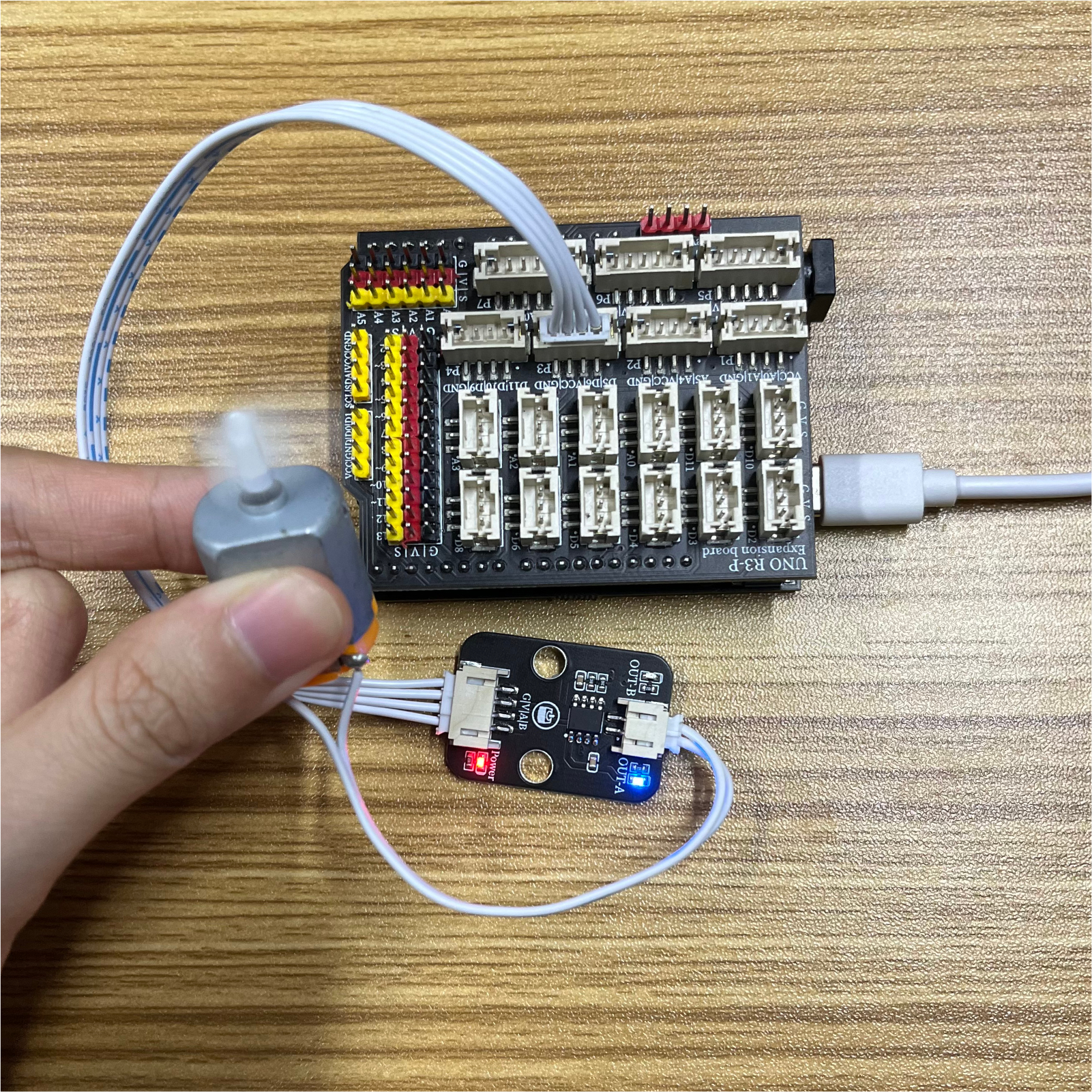
Testumgebung für Arduino UNO einrichten
Vorbereiten Sie die Komponenten:
UNO-R3 Entwicklungsboard *1
UNO-R3 P Erweiterungsplatine *1
USB type-c Datenkabel *1
Motor (mit 2.0 Stecker) *1
Elektromotorsteuermodul (HS-F04L) *1
PH2.0 4P-Doppelkopfsteckerleitung *1
Schaltplan der Leitung:
ESP32 Testumgebung einrichten
Vorbereiten Sie die Komponenten:Wird aktualisiert...
Schaltplan der Leitung:Wird aktualisiert...
9、Video-Tutorial
Arduino UNO Video-Tutorial:Klicken Sie zum Anzeigen
ESP32 Python Videoanleitung:aktualisieren
10、Testergebnis
Arduino UNO Testergebnis:
Das Gerät nach dem Verbindung der Kabel, die Software auf die Arduino UNO Entwicklungskarte hochladen, wird feststellen, dass der Motor gemäß dem Programm 1 Sekunde drehen und 1 Sekunde anhalten wird, und immer wieder in der Regel zirkulieren wird.Jetzt haben Sie sicherlich die Grundlagen der Theorie und Programmierung des Gleichstrommotors erlangt.Sie können nicht nur vorwärts und rückwärts gehen, sondern auch die Geschwindigkeit einstellen.Darüber hinaus können Sie mit dem gelernten Wissen noch viele großartige Anwendungen erstellen.
ESP32 Python-Testergebnis:
Nachdem Sie die Komponenten angeschlossen und das Programm auf die ESP32-Entwicklungskarte hochgeladen haben, wird festgestellt, dass der Motor nach dem Programm 1 Sekunde dreht und dann 1 Sekunde stehen bleibt und so weiter in einem Zyklus läuft.Jetzt haben Sie sicherlich die Grundlagen der Theorie und Programmierung des Gleichstrommotors erlangt.Sie können nicht nur vorwärts und rückwärts gehen, sondern auch die Geschwindigkeit einstellen.Darüber hinaus können Sie mit dem gelernten Wissen noch viele großartige Anwendungen machen.