
1、Einführung
Dies ist eine Motorsteuerung, die speziell für die Lego Technic Motoren und die Drehmotoren entwickelt wurde, kompatibel mit den meisten Lego Motoren und auch mit Lego Akkus betrieben wird.Sie können durch die Hoch- und Tiefspannung der beiden IO-Ports des Mikrocontrollers die Rotation und das Anhalten des Lego-Motors steuern. Sie können auch den Lenkungsmotor von Lego steuern und durch das Umschalten der Hoch- und Tiefspannung der beiden IO-Ports umkehren.Man kann auch die PWM-Pulsbreite verwenden, um die Drehzahl des Motors zu regeln. Der Motor kann sich nicht drehen, wenn der Spannungswert unter einen bestimmten Wert fällt.
2、Schemazeichnung
MOC Zweirichtungsmotorsteuerungsplatine-HS-F10L-B SchemaKlicken Sie zum Anzeigen
3、Modulparameter
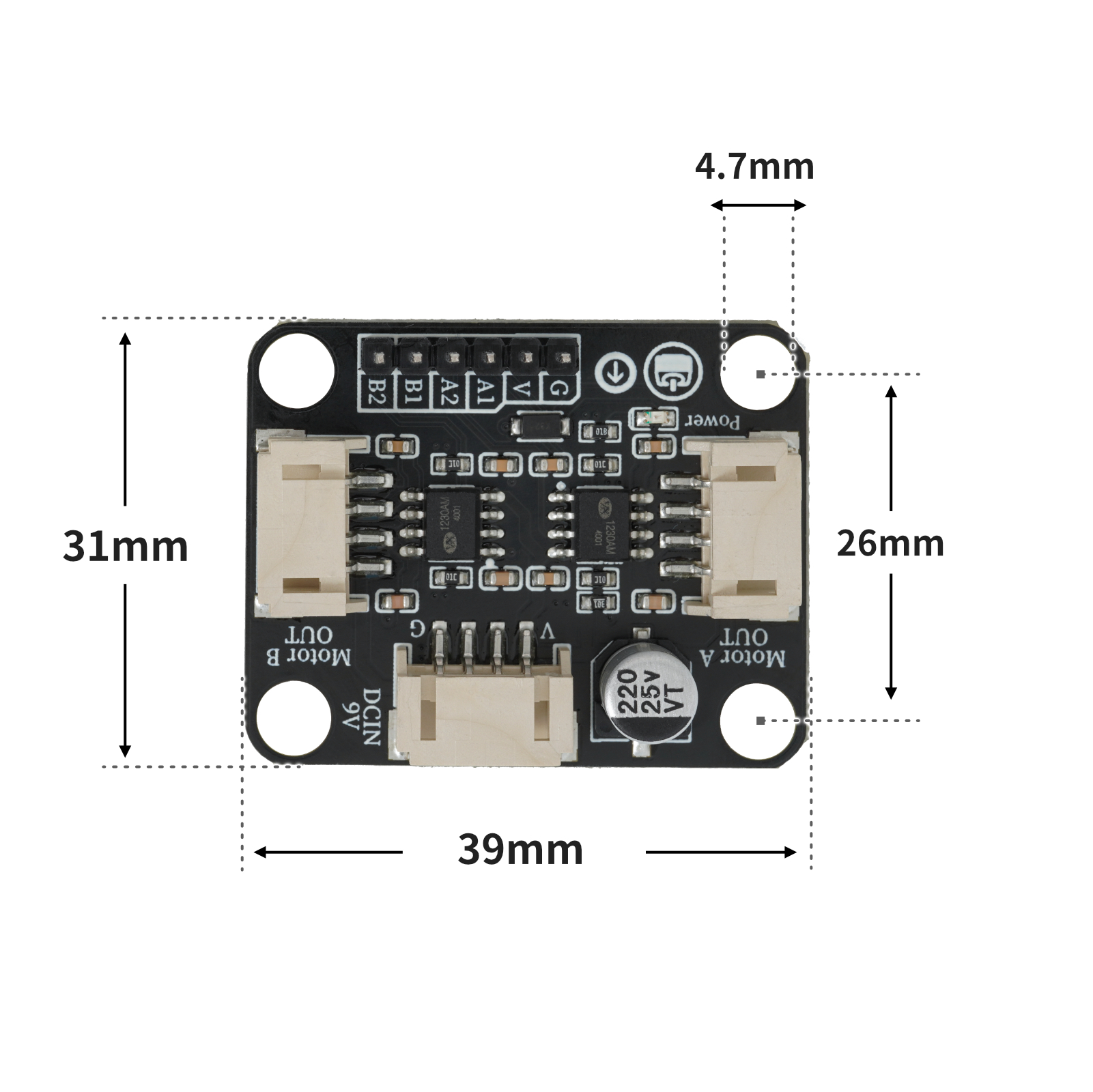
Pinbezeichnung | Beschreibung |
|---|---|
G | GND(Spannungsversorgungsminus) |
V | VCC(Spannungsversorgungsplus) |
B2 | Motor-B-Signalpin |
B1 | Motor-B-Signalpin |
A2 | Motor A Signal Pin |
A1 | Motor A Signal Pin |
Stromversorgung: 5V-9V
Verbindungsweg: 2.54 Stecker 4P Doppelkopf Dupont Kabel
Montageart: mit doppelter Schraube befestigen/Lego aufbauen
4, Platinegröße
5、Arduino IDE Beispielprogramm
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
Anleitung zum Herunterladen und Importieren der Bibliotheksdateien für das Arduino IDE:Klicken Sie zum Anzeigen
Beispielprogramm (UNO-Entwicklerboard):
void setMotor8833(int speedpin, int dirpin, int speed) {
if (speed == 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, 0);
} else if (speed > 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, speed);
} else {
digitalWrite(dirpin, HIGH);
analogWrite(speedpin, 255 + speed);
}
}
void procedure2() {
}
void procedure() {
}
void setup(){
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
digitalWrite(5, LOW);
digitalWrite(4, LOW);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
}
void loop(){
setMotor8833(5, 4, 200);
setMotor8833(6, 7, 200);
delay(3000);
setMotor8833(5, 4, 0);
setMotor8833(6, 7, 0);
delay(1000);
setMotor8833(5, 4, -200);
setMotor8833(6, 7, -200);
delay(3000);
setMotor8833(5, 4, 0);
setMotor8833(6, 7, 0);
delay(1000);
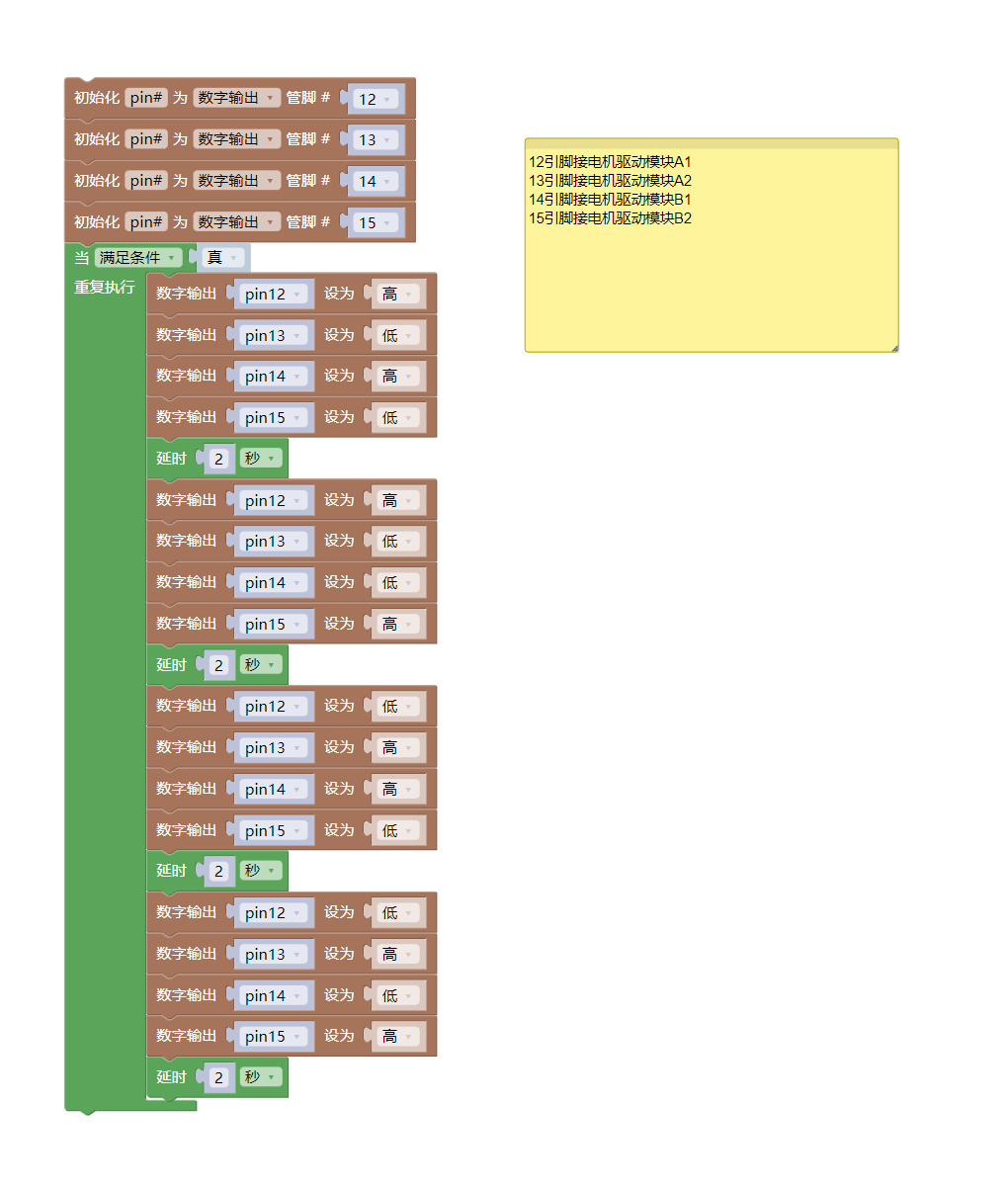
}6、ESP32 Python Beispiel (für Mixly IDE /米思齐)
Entwicklungsboard auswählen Python ESP32 [ESP32 Generic(4MB)] auf den Code-Modus umschalten und hochladen
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
示例程序(ESP32-Python):
import machine
import time
pin12 = machine.Pin(12, machine.Pin.OUT)
pin13 = machine.Pin(13, machine.Pin.OUT)
pin14 = machine.Pin(14, machine.Pin.OUT)
pin15 = machine.Pin(15, machine.Pin.OUT)
while True:
pin12.value(1)
pin13.value(0)
pin14.value(1)
pin15.value(0)
time.sleep(2)
pin12.value(1)
pin13.value(0)
pin14.value(0)
pin15.value(1)
time.sleep(2)
pin12.value(0)
pin13.value(1)
pin14.value(1)
pin15.value(0)
time.sleep(2)
pin12.value(0)
pin13.value(1)
pin14.value(0)
pin15.value(1)
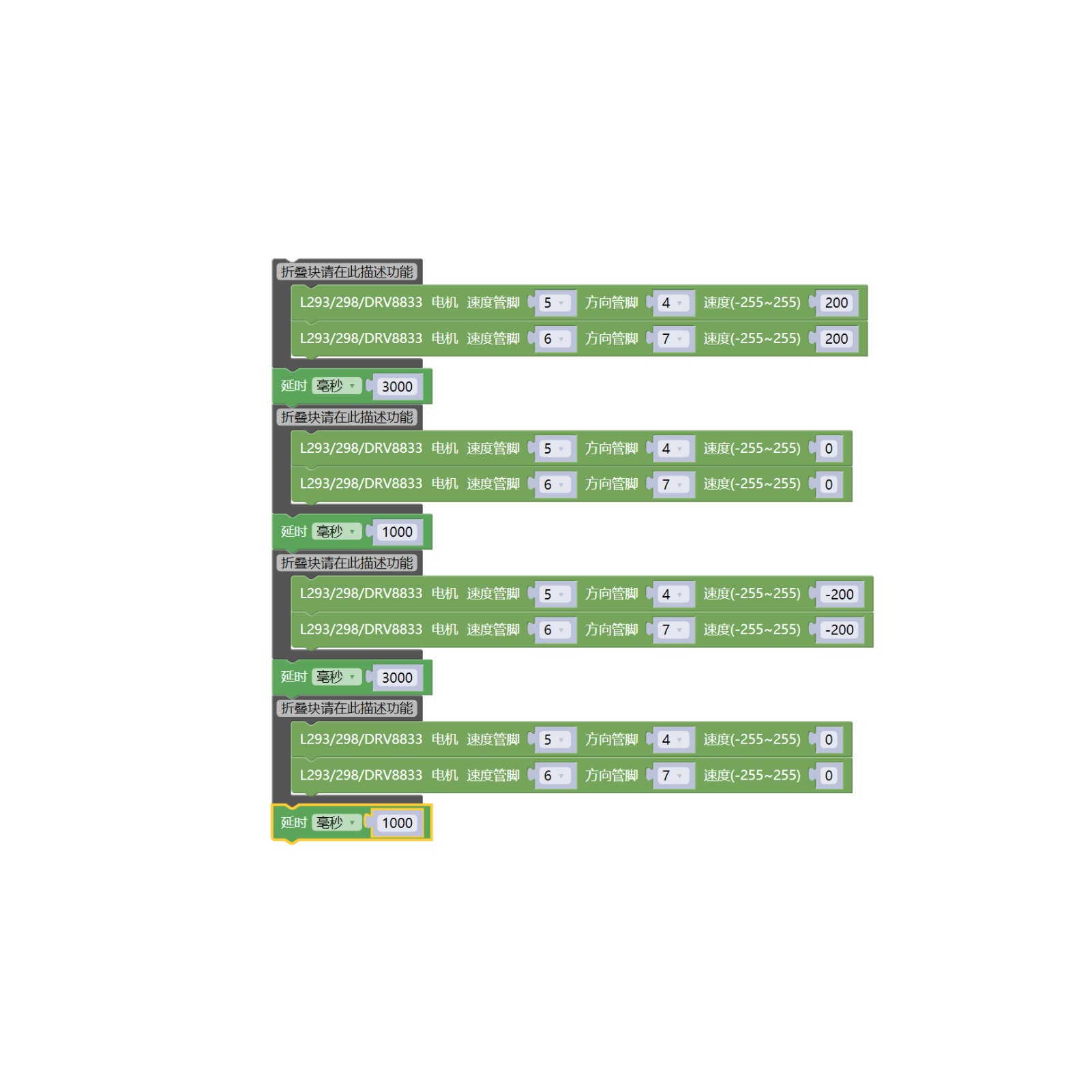
time.sleep(2)7、米思齐 Mixly 示例程序(图形化语言) in Deutsch
Beispielprogramm (UNO-Entwicklerboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE Arduino库文件下载及导入教程:Klicken Sie zum Anzeigen
Beispielprogramm (ESP32-Entwicklungsboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
8、Testumgebung Einrichtung
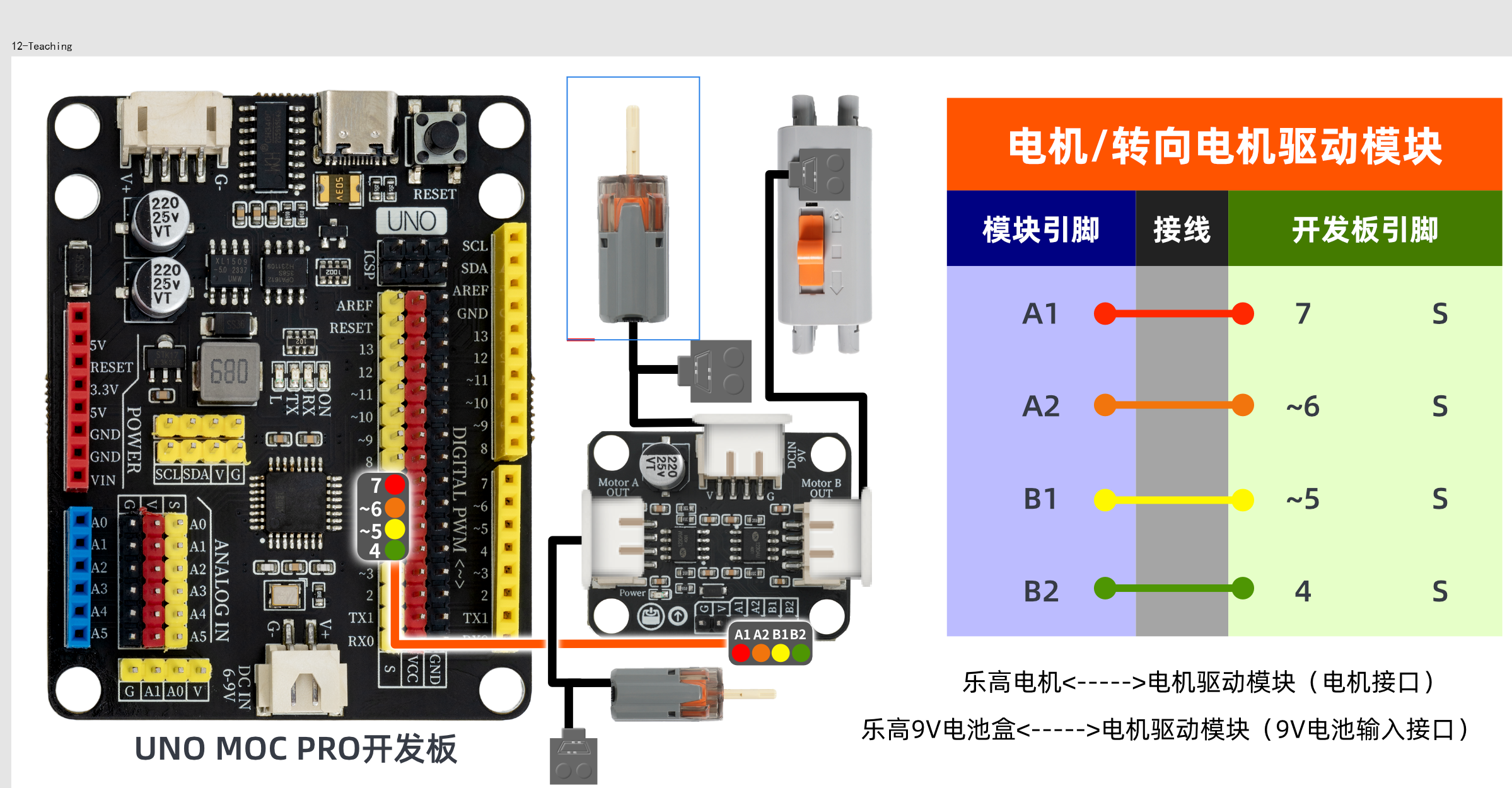
Testumgebung für Arduino UNO einrichten
Vorbereiten Sie die Komponenten:
HELLO STEM UNO MOC PRO Entwicklungskarte *1
USB type-c Datenkabel *1
Lego Motor*2
Lego Batteriebox*1
10cm Lego Verlängerungskabel*1
20cm Lego Verlängerungskabel*1
Motorsteuermodul (HS-F10L-B)*1
2.54 Stecker 4P Doppelkopf DuPont Kabel
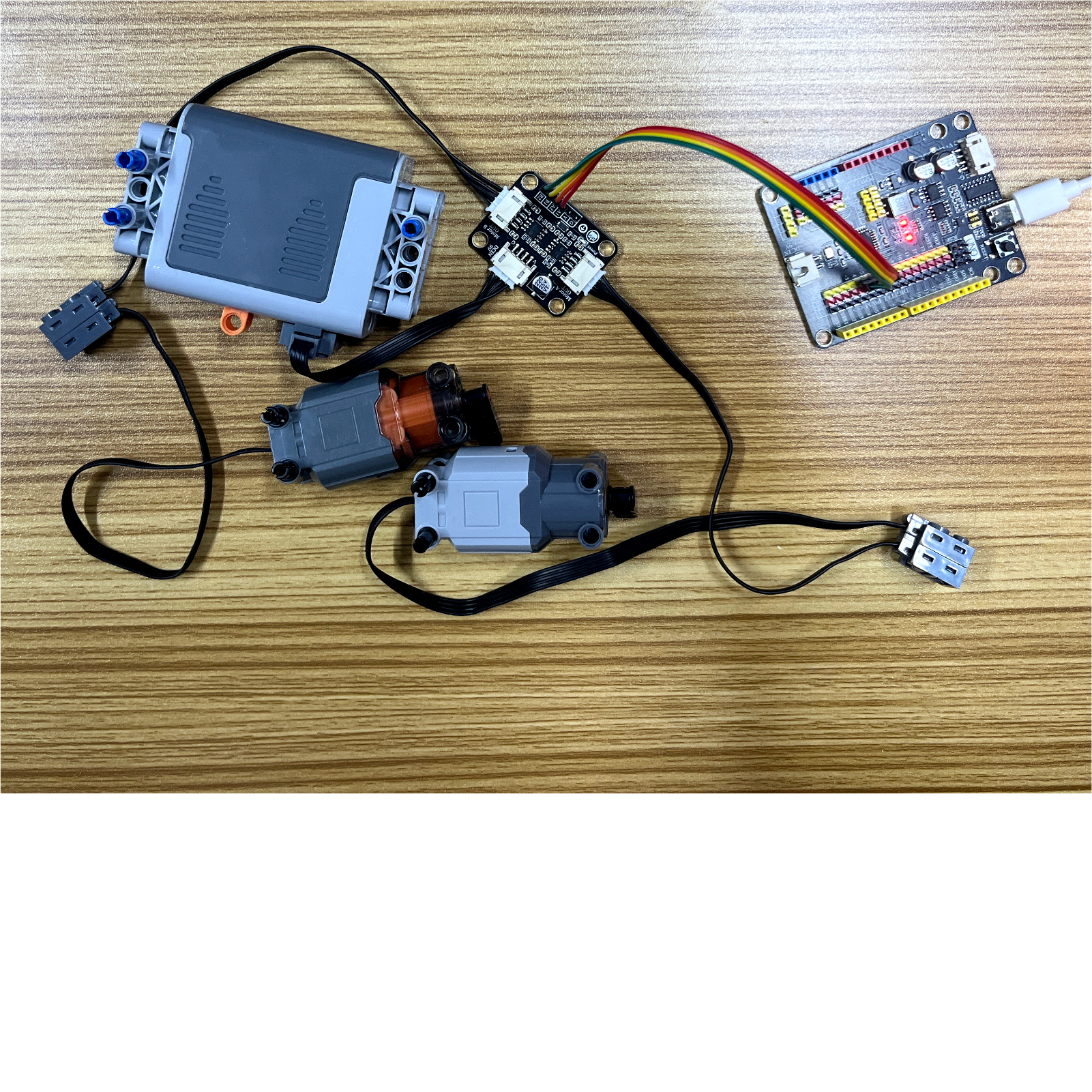
Schaltplan der Leitung:
ESP32 Testumgebung einrichten
Vorbereiten Sie die Komponenten:Wird aktualisiert...
Schaltplan der Leitung:Wird aktualisiert...
9、Video-Tutorial
Arduino UNOVideo-Tutorial:Klicken Sie zum Anzeigen
ESP32 Python Videoanleitung:Wird aktualisiert...
10、Testergebnis
Arduino UNO Testergebnis:
Das Gerät ist angeschlossen und die Software auf die Arduino UNO Entwicklungsplatine hochgeladen. Danach wird festgestellt, dass der Motor nach dem Programm 2 Sekunden dreht und dann 2 Sekunden stehen bleibt und sich immer wiederholt.Jetzt haben Sie sicherlich die Grundlagen der Theorie und Programmierung des直流电机的 erworben.Du kannst ihn nicht nur vorwärts und rückwärts bewegen, sondern auch die Geschwindigkeit einstellen.Darüber hinaus können Sie mit dem gelernten Wissen viele großartige Anwendungen erstellen.
ESP32 Python-Testergebnis:
Das Gerät ist an die Kabel angeschlossen und das Programm auf die ESP32-Entwicklungsplatine hochgeladen, dann wird festgestellt, dass der Motor nach dem Programm 2 Sekunden dreht und 2 Sekunden anhält und dann immer wieder in dieser Reihenfolge weiterläuft.Jetzt haben Sie sicher die Grundlagen der DC-Motoren-Theorie und Programmierung erlernt.Sie können nicht nur vorwärts und rückwärts gehen, sondern auch die Geschwindigkeit einstellen.Darüber hinaus können Sie mit dem gelernten Wissen viele großartige Anwendungen erstellen.