
1、Einführung
Von zwei L9110S-Chips wird der Motor angetrieben, der Spannungsbereich erstreckt sich von 2.5 bis 12V, 25°C, Vcc=5V, unter der Bedingung, dass beide Kanäle gleichzeitig arbeiten, erreicht der maximale kontinuierliche Ausgangsstrom des Kanals 1.2A, der maximale Spitzenausgangsstrom erreicht 2A; der maximale kontinuierliche Ausgangsstrom der beiden Kanäle beträgt 1A, der maximale Spitzenausgangsstrom beträgt 3.5A.
2、Schemazeichnung
Doppelte Elektromotorsteuerungsmodul-HS-F09B SchemaKlicken Sie zum Anzeigen
3、Modulparameter
Pinbezeichnung | Beschreibung |
|---|---|
G | GND(Spannungsversorgungsminus) |
V | VCC(Spannungsversorgungsplus) |
B2 | Motor-B-Signalpin |
B1 | Motor-B-Signalpin |
A2 | Motor A Signal Pin |
A1 | Motor A Signal Pin |
Spannungsversorgung: 3.3V / 5V
Verbindungsways: 2.54mm Reihenstecker
Montageart: Doppelbolzenfixierung
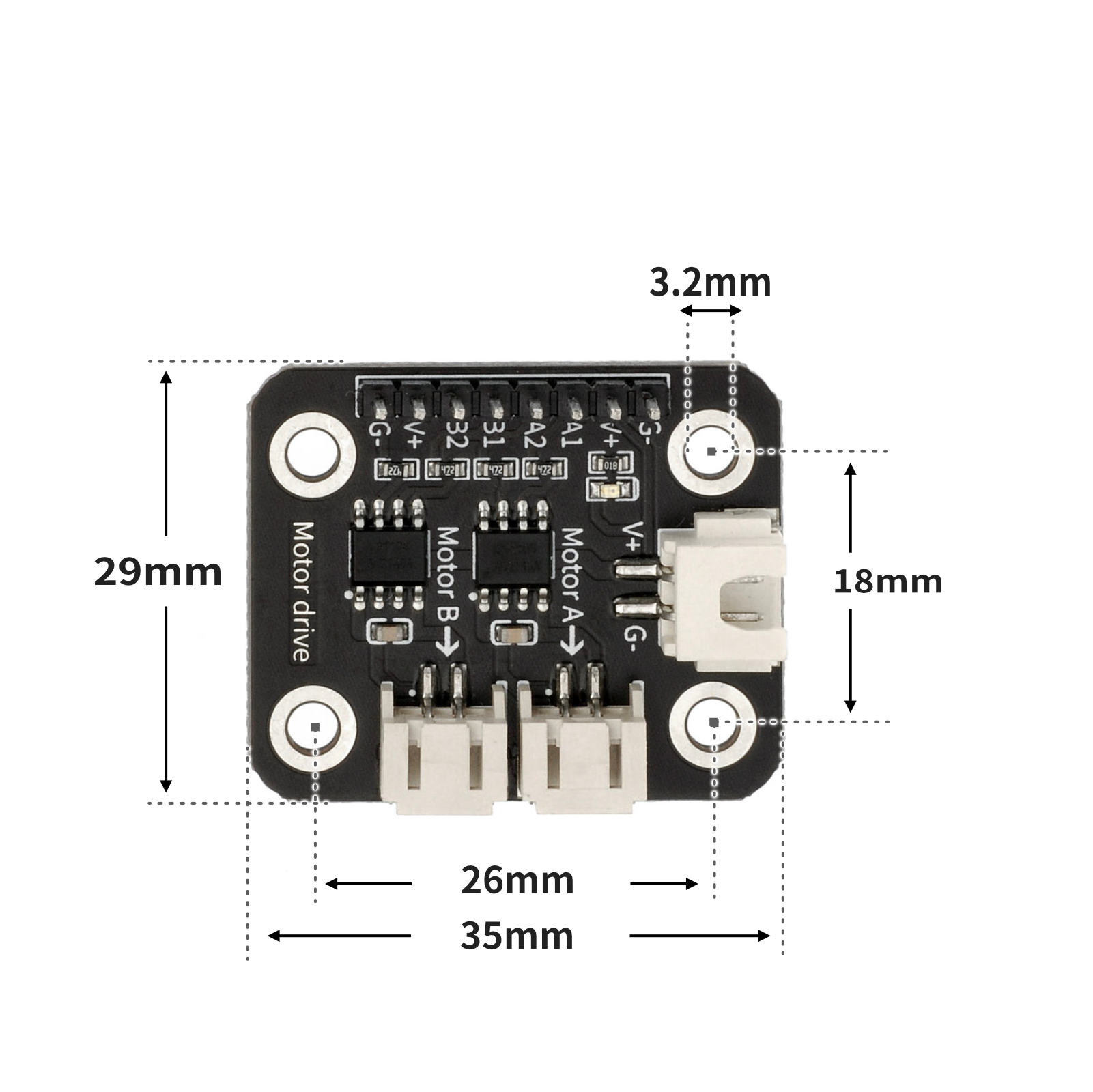
4, Platinegröße
5、Arduino IDE Beispielprogramm
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
Anleitung zum Herunterladen und Importieren der Bibliotheksdateien für das Arduino IDE:Klicken Sie zum Anzeigen
Beispielprogramm (UNO-Entwicklerboard):
int PWM= 0;
void left() {
analogWrite(5, PWM);
analogWrite(6, 0);
}
void right() {
analogWrite(10, PWM);
analogWrite(11, 0);
}
void setup(){
Serial.begin(9600);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(A0, INPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
}
void loop(){
//电机驱动板A1,A2引脚接D5,D6;
//电机驱动板B1,B2引脚接D9,D10;
//电位器模块接A0;
PWM = analogRead(A0) / 4;
left();
right();
Serial.println(PWM);
}6、ESP32 Python Beispiel (für Mixly IDE /米思齐)
Entwicklungsboard auswählen Python ESP32 [ESP32 Generic(4MB)] auf den Code-Modus umschalten und hochladen
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
示例程序(ESP32-Python):
import machine
def left():
pwm12.duty_u16(PWM)
pwm13.duty_u16(0)
def right():
pwm14.duty_u16(PWM)
pwm15.duty_u16(0)
adc32 = machine.ADC(machine.Pin(32))
pwm12 = machine.PWM(machine.Pin(12))
pwm13 = machine.PWM(machine.Pin(13))
pwm14 = machine.PWM(machine.Pin(14))
pwm15 = machine.PWM(machine.Pin(15))
PWM = 0
while True:
PWM = adc32.read_u16()
left()
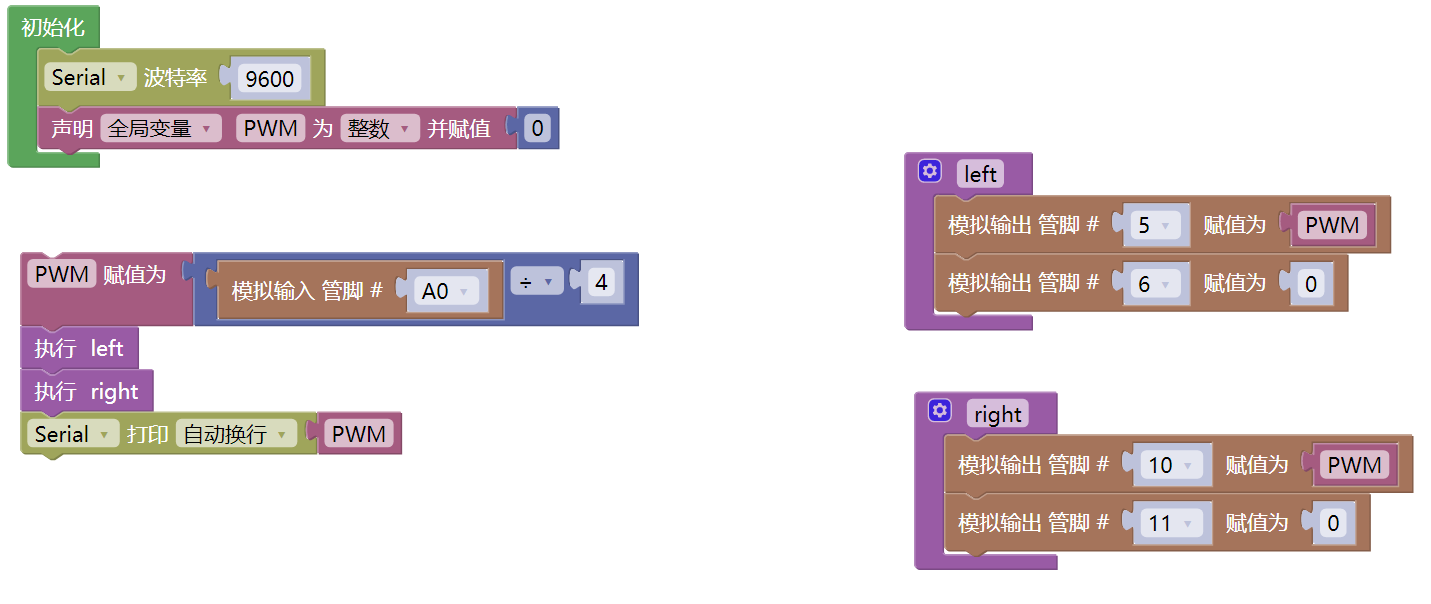
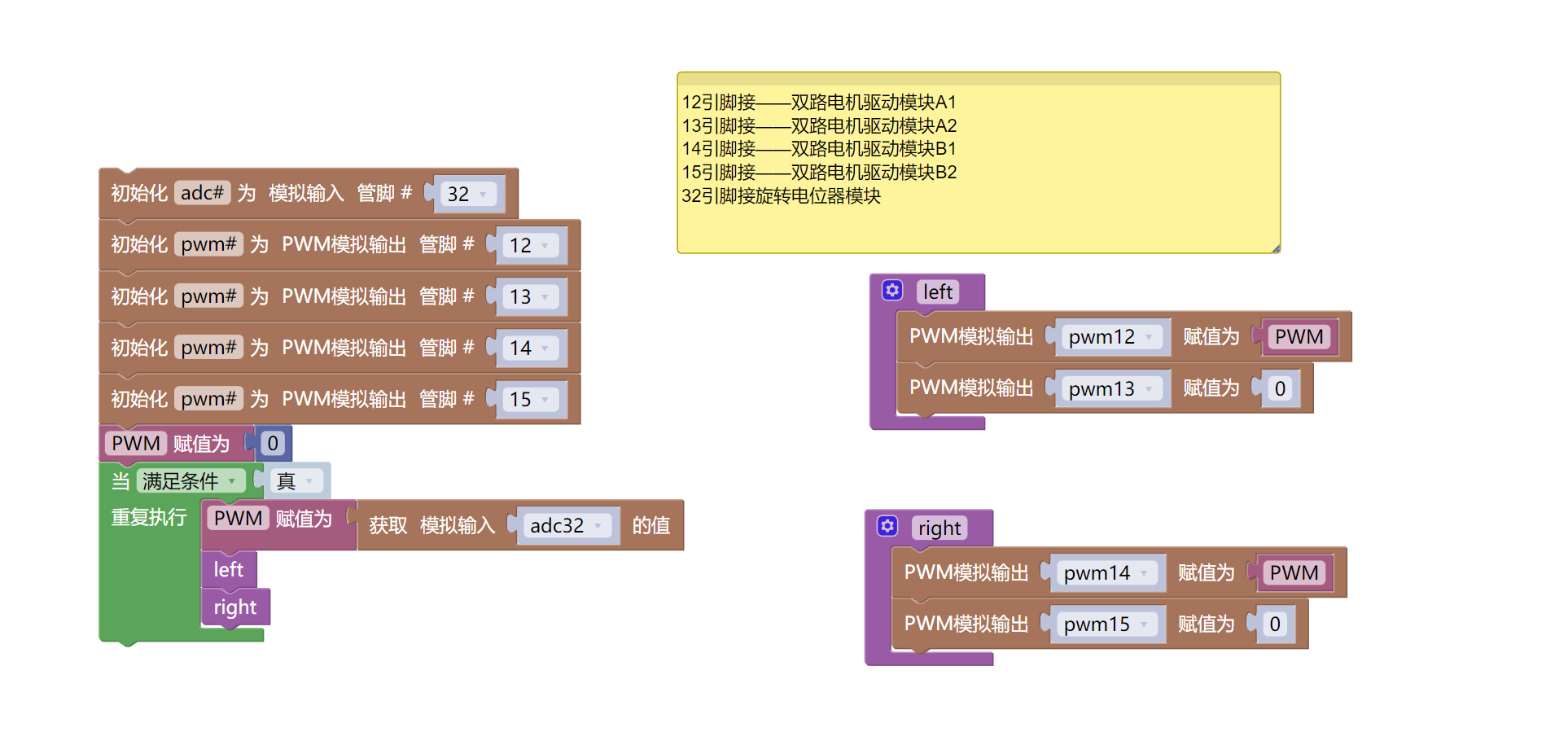
right()7、米思齐 Mixly 示例程序(图形化语言) in Deutsch
Beispielprogramm (UNO-Entwicklerboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE Arduino库文件下载及导入教程:Klicken Sie zum Anzeigen
Beispielprogramm (ESP32-Entwicklungsboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
Achtung: Wenn beim Hochladen des Programms eine Fehlermeldung bezüglich der Bibliotheksdateien angezeigt wird, laden Sie bitte zuerst die Bibliotheksdateien herunter!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:Klicken Sie zum Anzeigen
8、Testumgebung Einrichtung
Testumgebung für Arduino UNO einrichten
Vorbereiten Sie die Komponenten:
UNO-R3 PRO Entwicklungsboard *1
USB type-c Datenkabel *1
Zweifachmotorsteuerungsmodul (HS-F09C) *1
Drehpotentiometermodul (HS-S28A) *1
PH2.0-Anschlussmotor *2
1P Mutter zu Mutter Dupont-Kabel *3 Stück oder 3P Mutter zu Mutter Dupont-Kabel *1 Stück
1P Mutter auf Mutter Dupont-Kabel *4 Stück oder 2P Mutter auf Mutter Dupont-Kabel *2 Stück
3V~5V Akkuhalter *1
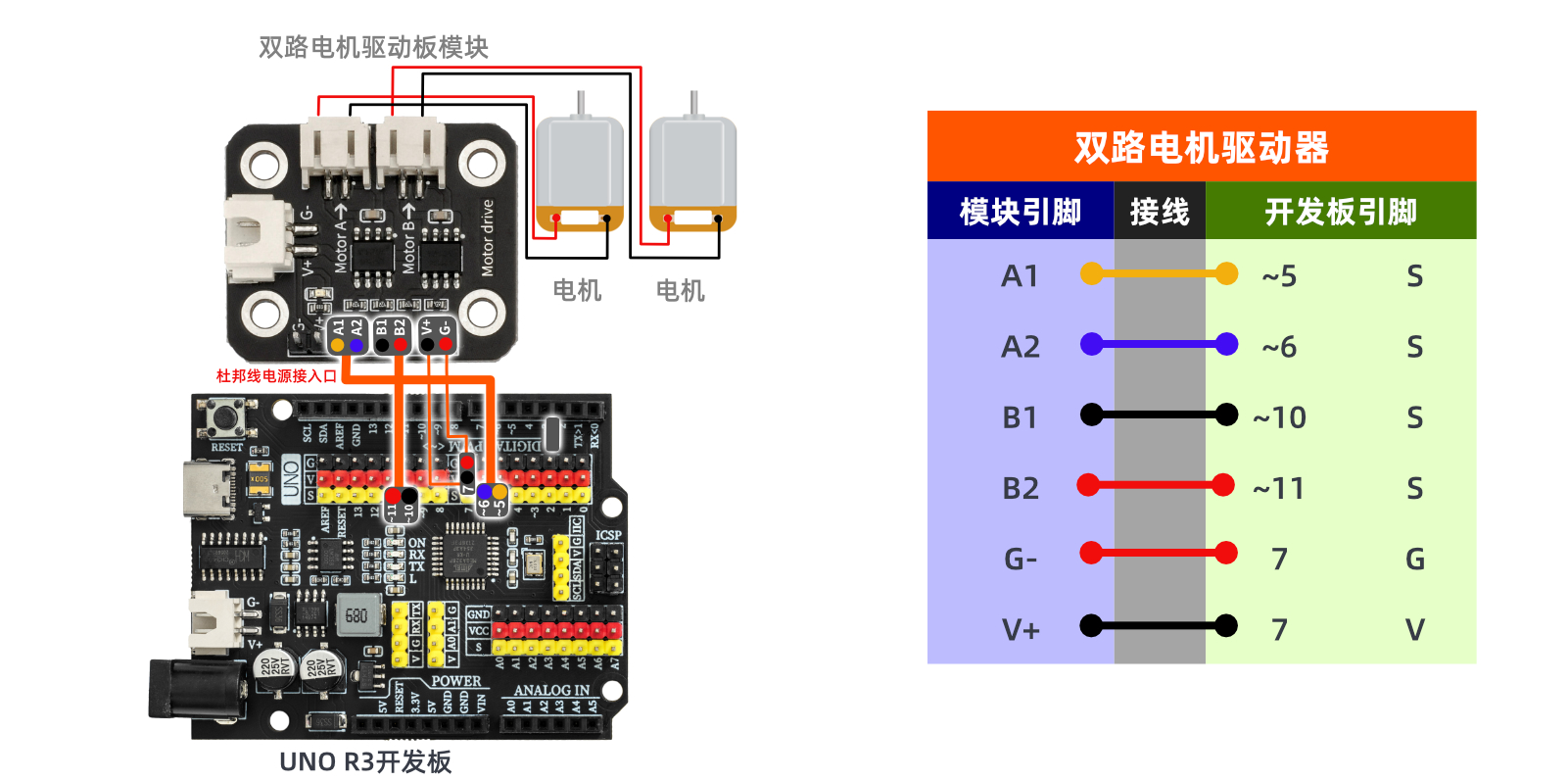
Schaltplan (HS-FO9C Version):
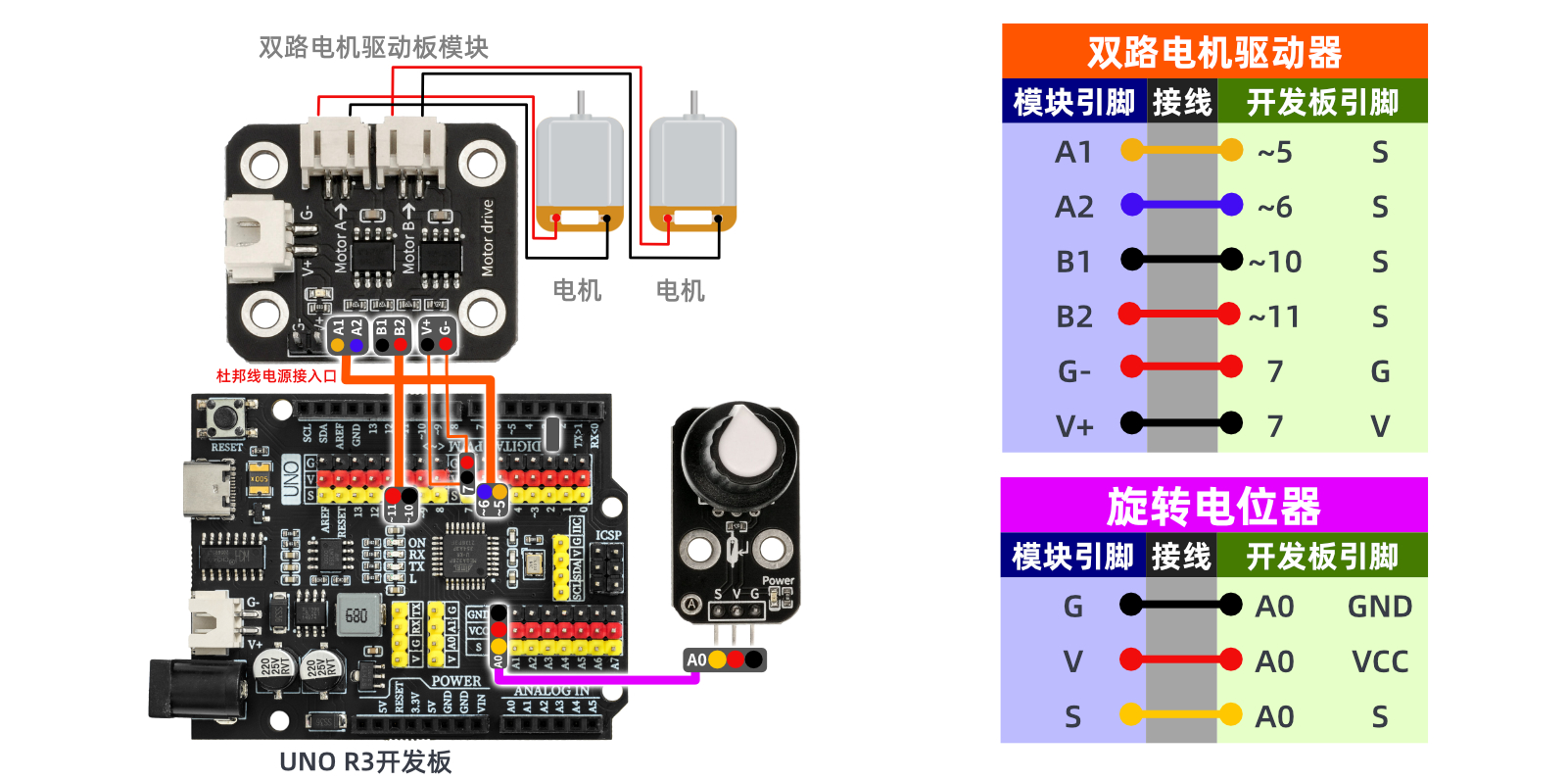
Schaltplan (HS-FO9A Version):
ESP32 Testumgebung einrichten
Vorbereiten Sie die Komponenten:Wird aktualisiert...
Schaltplan der Leitung:Wird aktualisiert...
9、Video-Tutorial
Video-Tutorial:Klicken Sie zum Anzeigen
10、Testergebnis
Arduino UNO Testergebnis:
Nachdem die Kabel am Gerät gut angeschlossen sind, kopieren Sie das obige Programm auf die Entwicklungskarte, öffnen Sie den Schalter im Batteriefach und drehen Sie den Drehwiderstand, um die Drehzahl des Motors anzupassen.