

1、Einführung
Das Herzfrequenzsensor ist ein elektronisches Gerät zur Überwachung der Herzschlagfrequenz und -rhythmus, das in der medizinischen Gesundheitsversorgung, Sportgymnastik und intelligenten Kleidung weit verbreitet ist.
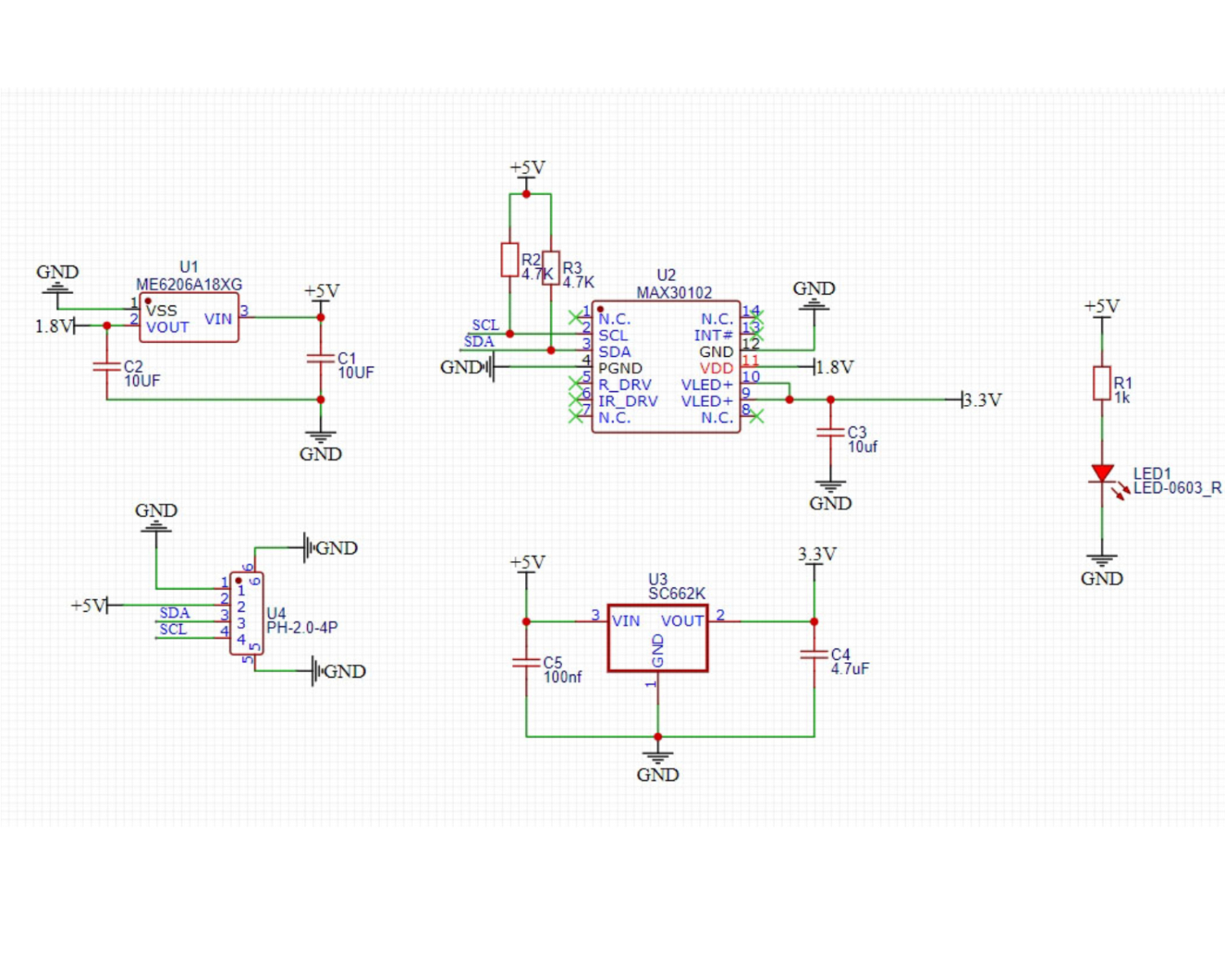
2、Schemazeichnung
3、Modulparameter
Pinbezeichnung | Beschreibung |
|---|---|
GND | GND(Spannungsversorgungsminus) |
VCC | VCC(Spannungsversorgungsplus) |
A | IIC-Datenübertragungsstecker |
L | IIC-Kommunikationsuhrstecker |
Spannungsversorgung: 3.3V - 5V
Verbindungsmethode: PH2.0 4P Steckerkabel
Installationsmethode: Bausteinmontage
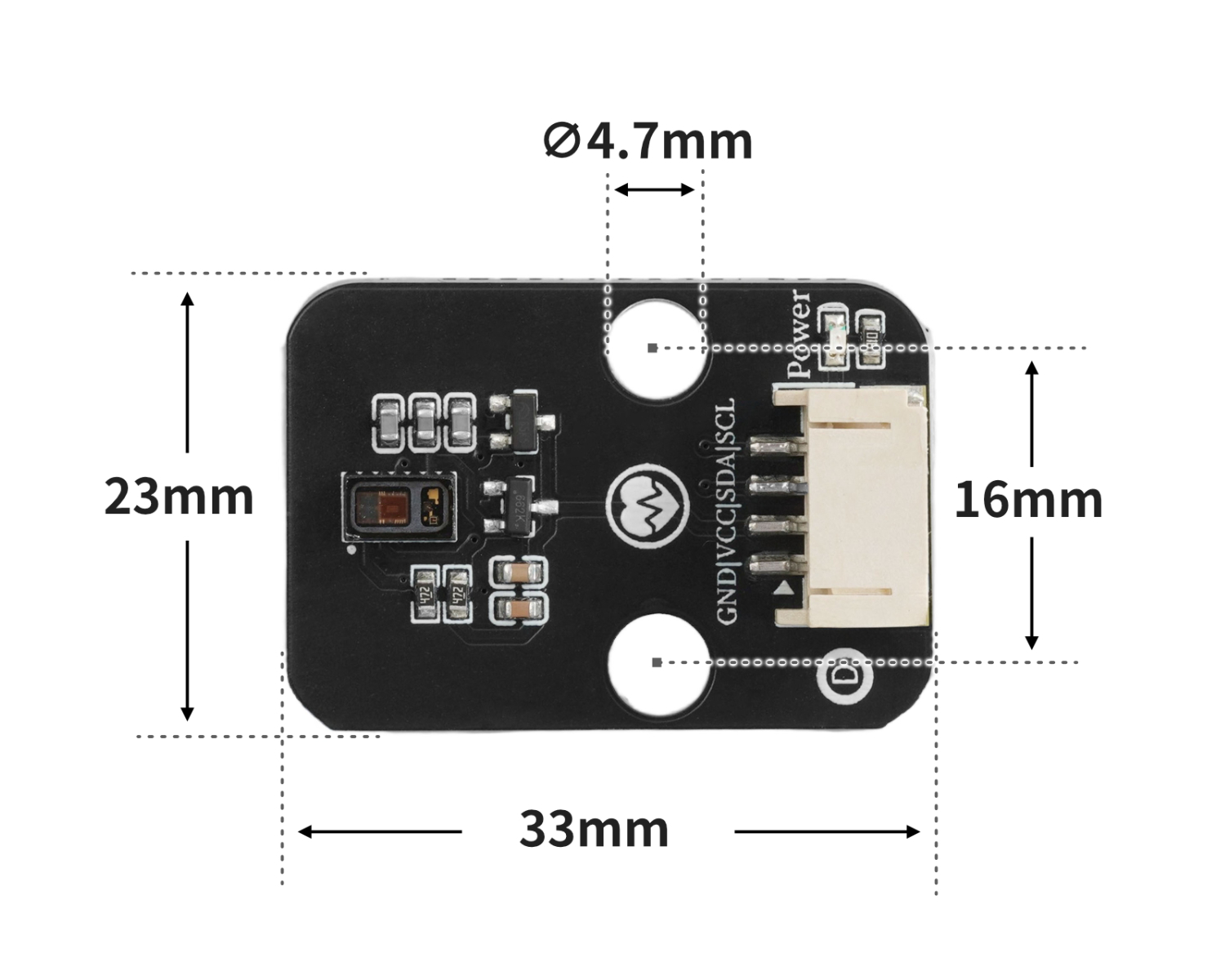
4, Platinegröße
5、Arduino IDE Beispielprogramm
Beispielprogramm (UNO-Entwicklerboard): Klicken Sie zum Herunterladen
#include <Wire.h>
#include "MAX30105.h"
#include "heartRate.h"
MAX30105 particleSensor;
const byte RATE_SIZE = 4; //Increase this for more averaging. 4 is good.
byte rates[RATE_SIZE]; //Array of heart rates
byte rateSpot = 0;
long lastBeat = 0; //Time at which the last beat occurred
float beatsPerMinute;
int Bpm_value;
void setup(){
Serial.begin(9600);
particleSensor.begin(Wire, I2C_SPEED_FAST);
particleSensor.setup(); //Configure sensor with default settings
particleSensor.setPulseAmplitudeRed(0x0A); //Turn Red LED to low to indicate sensor is running
particleSensor.setPulseAmplitudeGreen(0); //Turn off Green LED
}
void loop(){
long irValue = particleSensor.getIR();
if (checkForBeat(irValue) == true)
{
//We sensed a beat!
long delta = millis() - lastBeat;
lastBeat = millis();
beatsPerMinute = 60 / (delta / 1000.0);
if (beatsPerMinute < 255 && beatsPerMinute > 20)
{
rates[rateSpot++] = (byte)beatsPerMinute; //Store this reading in the array
rateSpot %= RATE_SIZE; //Wrap variable
//Take average of readings
Bpm_value = 0;
for (byte x = 0 ; x < RATE_SIZE ; x++)
Bpm_value += rates[x];
Bpm_value /= RATE_SIZE;
}
}
Serial.print("Bpm_value = ");
Serial.print(Bpm_value);
Serial.println(" bpm");
}Beispielprogramm (ESP32-Entwicklungsboard - basierend auf Python, kann nicht mit Arduino IDE hochgeladen werden):
from machine import I2C, Pin
import time
MAX3010X_I2C_ADDR = 0x57
REG_FIFOWRITEPTR = 0x04
REG_FIFOOVERFLOW = 0x05
REG_FIFOREADPTR = 0x06
REG_FIFODATA = 0x07
REG_FIFOCONFIG = 0x08
REG_MODECONFIG = 0x09
REG_PARTICLECONFIG = 0x0A
REG_LED1_PA = 0x0C
REG_LED2_PA = 0x0D
REG_MULTILEDCONFIG1= 0x11
REG_MULTILEDCONFIG2= 0x12
REG_PARTID = 0xFF
EXPECTED_PARTID = 0x15
def _mask_write(i2c, addr, reg, mask, bits):
cur = i2c.readfrom_mem(addr, reg, 1)[0]
cur &= mask
cur |= bits
i2c.writeto_mem(addr, reg, bytes([cur]))
class MAX3010x:
def __init__(self, i2c, address=MAX3010X_I2C_ADDR):
self.i2c = i2c
self.address = address
def read_reg(self, reg):
return self.i2c.readfrom_mem(self.address, reg, 1)[0]
def write_reg(self, reg, val):
self.i2c.writeto_mem(self.address, reg, bytes([val & 0xFF]))
def soft_reset(self):
_mask_write(self.i2c, self.address, REG_MODECONFIG, 0xBF, 0x40)
t0 = time.ticks_ms()
while time.ticks_diff(time.ticks_ms(), t0) < 100:
if (self.read_reg(REG_MODECONFIG) & 0x40) == 0:
return True
time.sleep_ms(1)
return False
def setup(self):
self.soft_reset()
_mask_write(self.i2c, self.address, REG_FIFOCONFIG, 0b11100000, 0x40)
_mask_write(self.i2c, self.address, REG_FIFOCONFIG, 0xEF, 0x10)
_mask_write(self.i2c, self.address, REG_MODECONFIG, 0xF8, 0x03)
_mask_write(self.i2c, self.address, REG_PARTICLECONFIG, 0x9F, 0x60)
_mask_write(self.i2c, self.address, REG_PARTICLECONFIG, 0xE3, 0x00)
_mask_write(self.i2c, self.address, REG_PARTICLECONFIG, 0xFC, 0x03)
self.write_reg(REG_LED1_PA, 0x4F)
self.write_reg(REG_LED2_PA, 0x4F)
_mask_write(self.i2c, self.address, REG_MULTILEDCONFIG1, 0xF8, 0x01)
_mask_write(self.i2c, self.address, REG_MULTILEDCONFIG1, 0x8F, 0x20)
self.write_reg(REG_FIFOREADPTR, 0)
self.write_reg(REG_FIFOOVERFLOW, 0)
self.write_reg(REG_FIFOWRITEPTR, 0)
def read_fifo_red_ir(self):
if self.read_reg(REG_FIFOREADPTR) == self.read_reg(REG_FIFOWRITEPTR):
return None
data = self.i2c.readfrom_mem(self.address, REG_FIFODATA, 6)
red = ((data[0] << 16) | (data[1] << 8) | data[2]) & 0x3FFFF
ir = ((data[3] << 16) | (data[4] << 8) | data[5]) & 0x3FFFF
return red, ir
lastBeatTime = 0
threshold = 2000
peak = 0
trough = 999999
amp = 0
IBI = 600
firstBeat = True
secondBeat = False
rate = [600] * 10
rate_index = 0
def checkForBeat(ir_value):
global threshold, peak, trough, amp
global lastBeatTime, firstBeat, secondBeat
global IBI, rate, rate_index
now = time.ticks_ms()
signal = ir_value
if signal < threshold and signal < trough:
trough = signal
if signal > threshold and signal > peak:
peak = signal
if signal > threshold and (time.ticks_diff(now, lastBeatTime) > 300):
IBI = time.ticks_diff(now, lastBeatTime)
lastBeatTime = now
if firstBeat:
firstBeat = False
secondBeat = True
return False
if secondBeat:
secondBeat = False
for i in range(len(rate)):
rate[i] = IBI
rate[rate_index] = IBI
rate_index = (rate_index + 1) % len(rate)
amp = peak - trough
threshold = trough + amp * 0.5
peak = threshold
trough = threshold
return True
if time.ticks_diff(now, lastBeatTime) > 2500:
threshold = signal * 0.97
peak = threshold
trough = threshold
firstBeat = True
secondBeat = False
return False
def read_bpm(timeout_ms=8000):
i2c = I2C(1, scl=Pin(22), sda=Pin(21), freq=400000)
sensor = MAX3010x(i2c)
sensor.setup()
start = time.ticks_ms()
while time.ticks_diff(time.ticks_ms(), start) < timeout_ms:
data = sensor.read_fifo_red_ir()
if not data:
time.sleep_ms(5)
continue
red, ir = data
if ir < 20000:
continue
if checkForBeat(ir):
avg_IBI = sum(rate) / len(rate)
bpm = 60000 / avg_IBI
new_bpm = bpm - 80
if new_bpm < 0:
return 0
else:
return int(new_bpm)
return 0
import machine
while True:
xinlv = read_bpm()
print(('心率值(BMP):' + str(xinlv)))
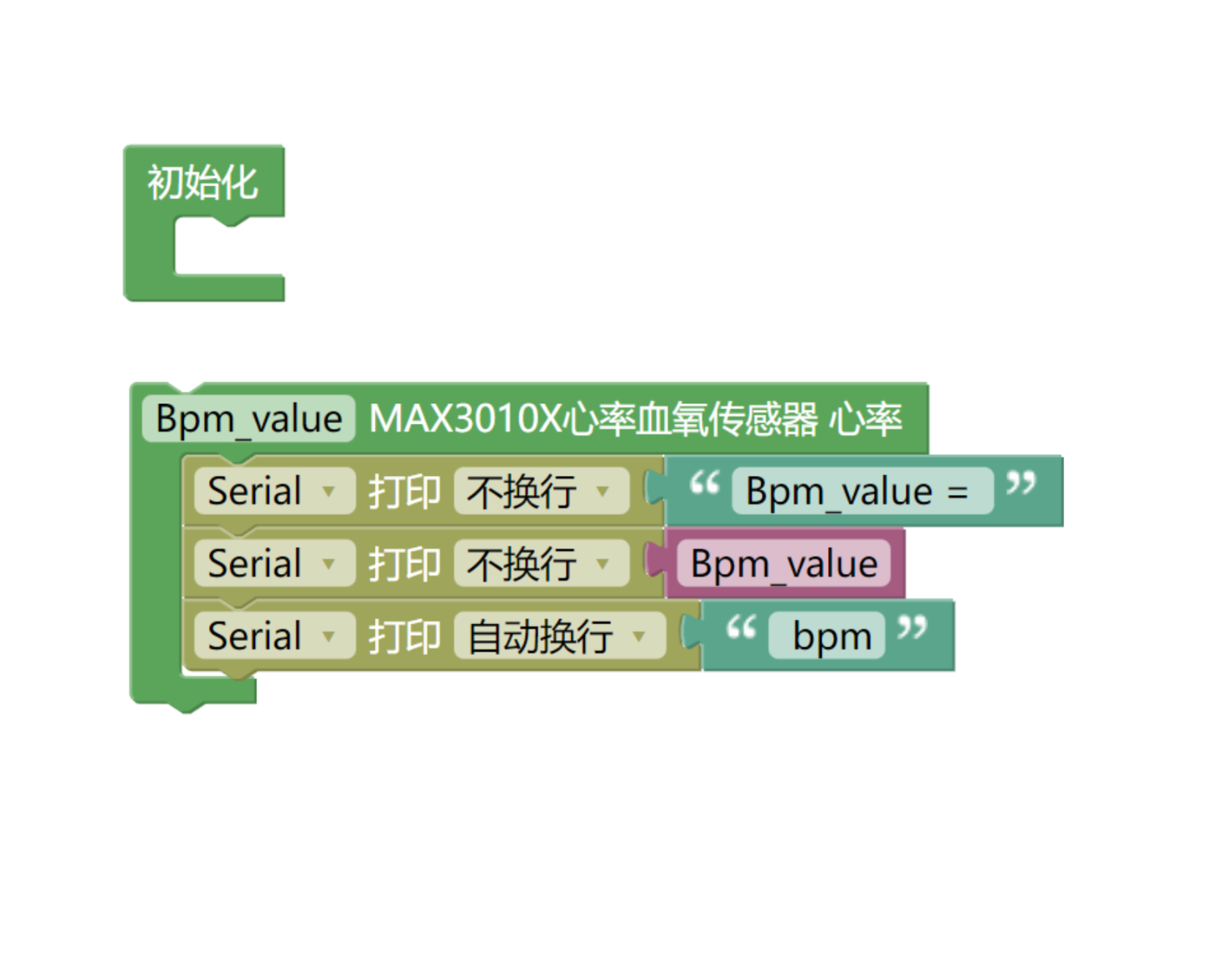
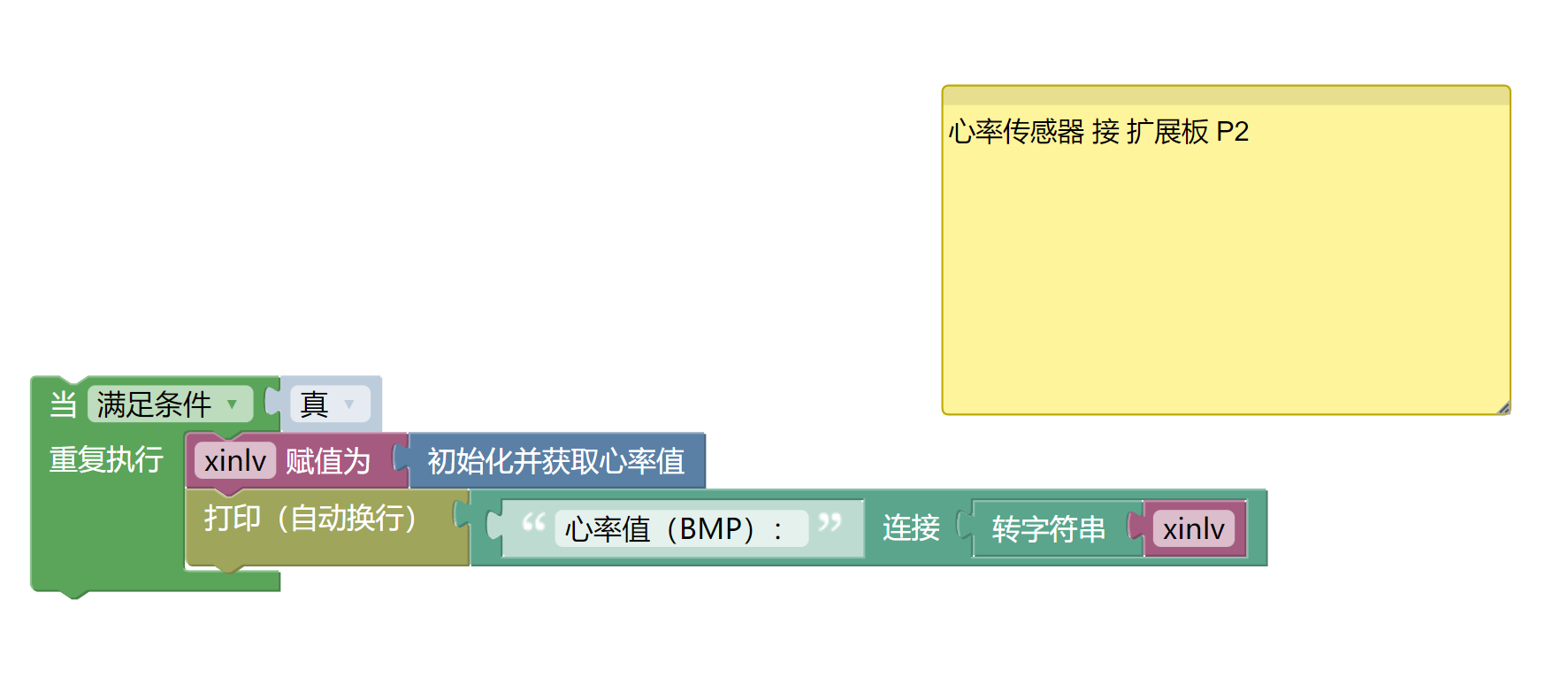
6、米思齐 Mixly 示例程序(图形化语言)
Beispielprogramm (UNO-Entwicklerboard):2、第二步将UNO开发板的库文件下载后解压在桌面。
示例程序(ESP32开发板):2、第二步将UNO开发板的库文件下载后解压在桌面。
7, Aufbau des Testumgebungs
Arduino-Umgebung einrichten
Vorbereiten Sie die Komponenten:
HELLO STEM UNO R3 Entwicklungsplatine *1
HELLO STEM UNO EXP1 Erweiterungsplatte *1
USB type-c Datenkabel *1
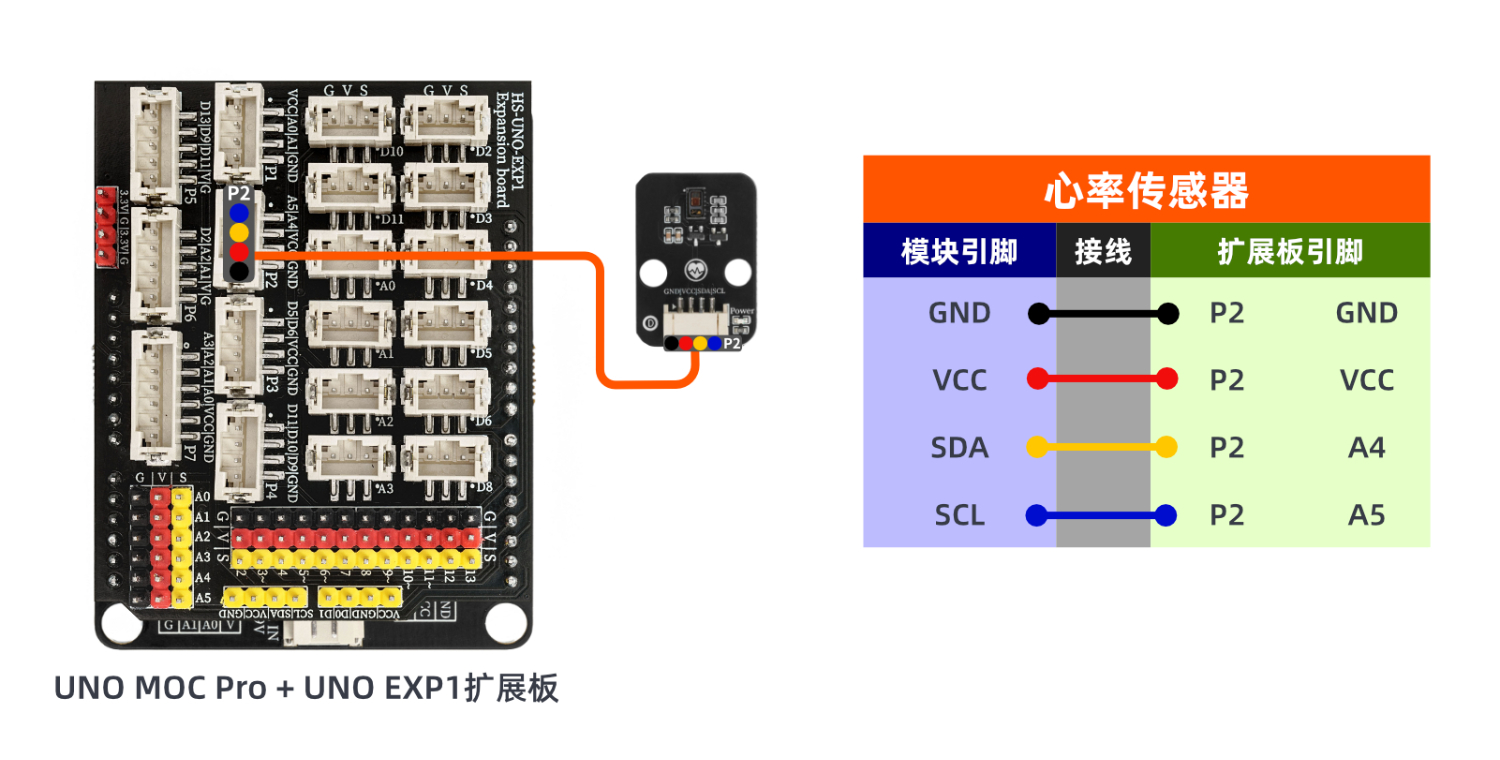
Herzfrequenzsensor-Modul (HS-S70-L)*1
PH2.0 4P Steckerkabel *1
Schaltplan der Leitung:
Einrichtung der Micropython-Umgebung
Vorbereiten Sie die Komponenten:
ESP32EA MOC Entwicklungsboard *1
ESP32-EXP1 Erweiterungsplatine *1
USB type-c Datenkabel *1
Herzfrequenzsensor-Modul (HS-S70-L)*1
PH2.0 4P Steckerkabel *1
Schaltplan der Leitung:
8、Arduino-Bibliothek hinzufügen
Hier ist der Bezug für die Verwendung der Bibliothek:Bibliothek installieren und verwenden
Bibliothekskdatei:2、第二步将UNO开发板的库文件下载后解压在桌面。
米思齐UNO开发板库文件安装步骤(使用代码前先下载安装米思齐库文件):参考链接
9、MicroPython-Umgebung-Bibliothekdatei hinzufügen
米思齐ESP32开发板库文件下载安装步骤(使用代码前先下载安装米思齐库文件):参考链接
10、Video-Tutorial
Videoanleitung: Klicken Sie, um anzusehen
11、Testergebnis
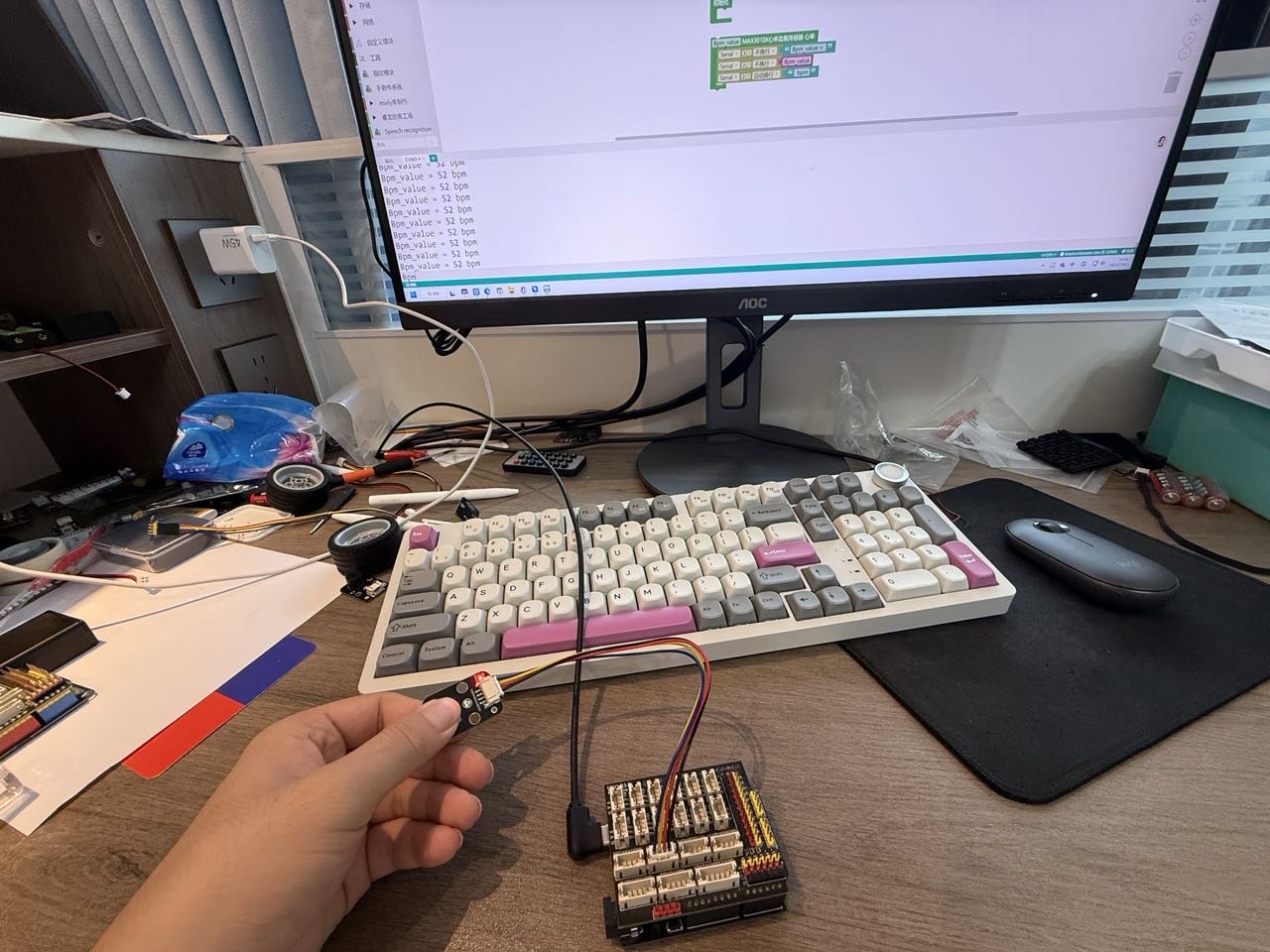
Nachdem die Komponenten angeschlossen und die Leitung gut gemacht sind, laden Sie das obige Programm auf die Entwicklungsplatine hoch, und Sie können die Datenmessung des Herzfrequenzsensormoduls sehen.