

1、Einführung
Der Joystick ist ein Eingabegerät, das aus einem Stab besteht, der in einem Fußgelenk rotiert und dem gesteuerten Gerät seine Winkel oder Richtungen meldet.Der Joystick wird in der Regel zur Steuerung von Videospielen verwendet, hat normalerweise einen oder mehrere Tasten und sein Zustand kann auch vom Computer gelesen werden.Eine populäre Variante des Joysticks, der auf modernen Videospielsystemen verwendet wird, ist der Analogstick.Der Hebel wird auch zum Steuern von Kranen, Lastwagen, Unterwasserfahrzeugen ohne Skipper, Rollstühlen, Überwachungskameras und Rasenmähern mit Nullwenderadius und anderen Maschinen verwendet.Der Joystick mit kleiner Fingerbedienung wurde als Eingabegerät für kleine elektronische Geräte wie Handys verwendet.
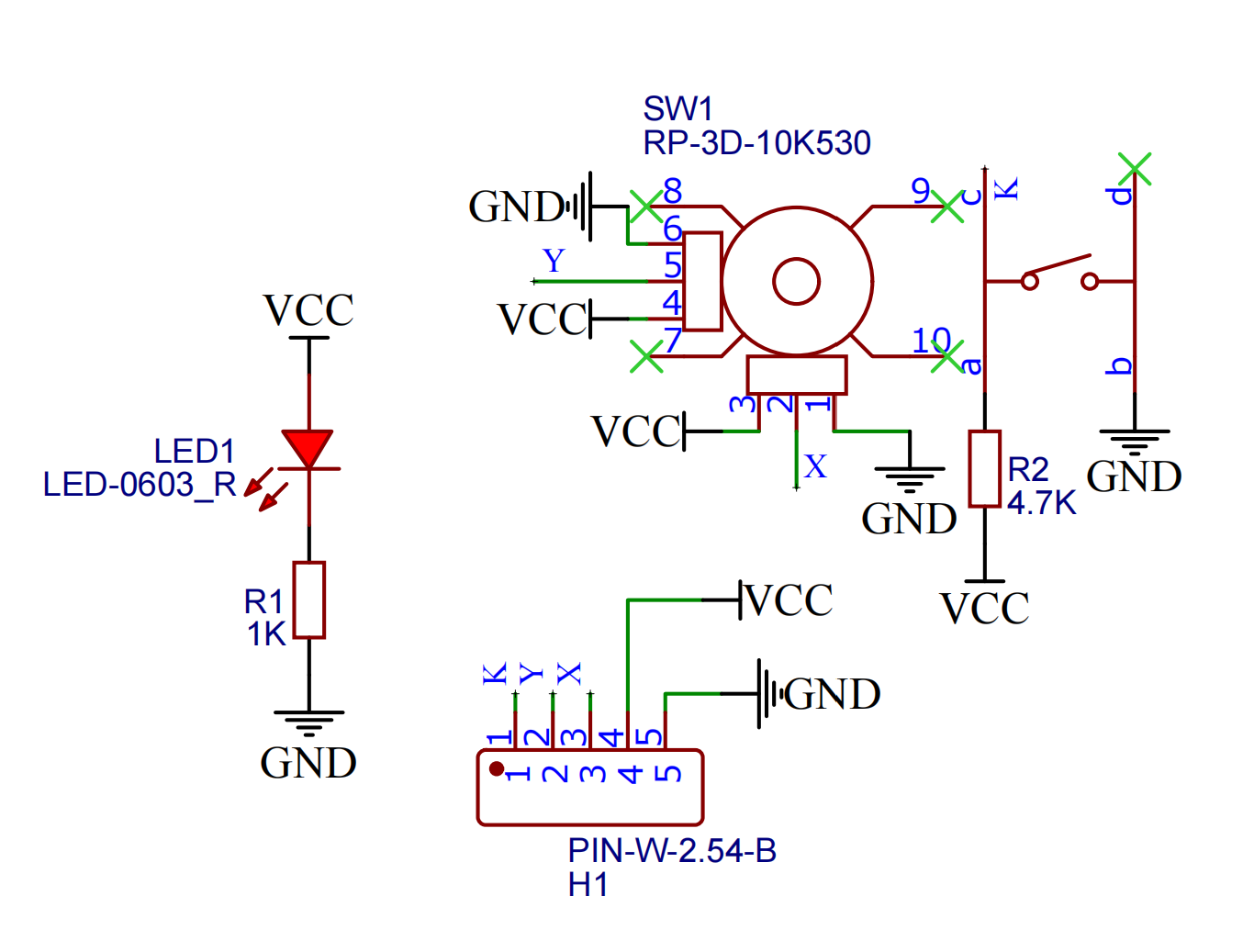
2、Schemazeichnung
3、Modulparameter
Pinbezeichnung | Beschreibung |
|---|---|
G | GND(Spannungsversorgungsminus) |
V | VCC(Spannungsversorgungsplus) |
X | Simulations-Signal-Pin |
Y | Simulations-Signal-Pin |
K | Digital Signalspinne |
Spannungsversorgung: 3.3V / 5V
Verbindungsmethode: PH2.0 Steckerkabel
Montageart: Fest mit vier Schrauben
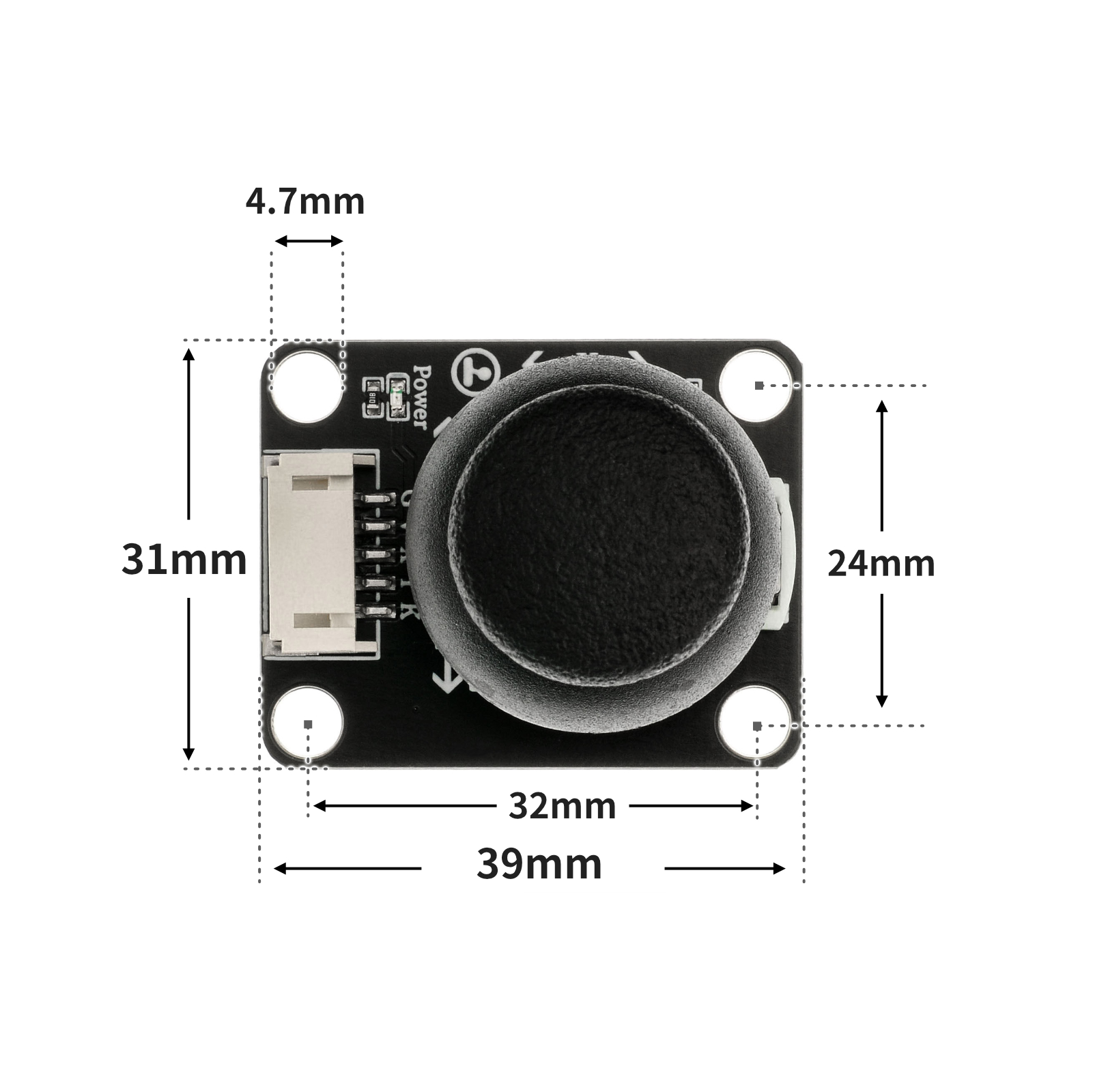
4, Platinegröße
5、Arduino IDE Beispielprogramm
Arduino UNO Beispiel (für Mixly IDE, Arduino IDE):
int x= 0;//定义遥感X轴电压模拟值变量
int y= 0;//定义遥感Y轴电压模拟值变量
boolean k= 0;//定义遥感K引脚状态变量
void setup(){
Serial.begin(9600);//设置波特率
pinMode(A2, INPUT);//定义A2为输入引脚
pinMode(A1, INPUT);//定义A1为输入引脚
pinMode(7, INPUT);//定义A0为输入引脚
}
void loop(){
x = analogRead(A2);//获取遥杆X轴电压模拟值
y = analogRead(A1);//获取遥杆Y轴电压模拟值
k = digitalRead(7);//获取遥杆按键状态
Serial.print("x: ");
Serial.print(x);//打印获取到遥杆X轴电压模拟值
Serial.print("| y: ");
Serial.print(y);//打印获取到遥杆X轴电压模拟值
Serial.print("|K: ");
Serial.println(k);//打印获取到遥杆按键状态
delay(200);
}ESP32 Python-Beispiel (geeignet für Mixly IDE / Mezishi)
(Entwicklungsboard auswählen Python ESP32 【ESP32 Generic(4MB)】in den Code-Modus wechseln und hochladen ):
import machine
import time
adc35 = machine.ADC(machine.Pin(35))
adc34 = machine.ADC(machine.Pin(34))
pin15 = machine.Pin(15, machine.Pin.IN)
while True:
print('X ',end ="")
print(adc35.read_u16(),end ="")
print('Y ',end ="")
print(adc34.read_u16(),end ="")
print('Z ',end ="")
print(pin15.value())
time.sleep_ms(100)
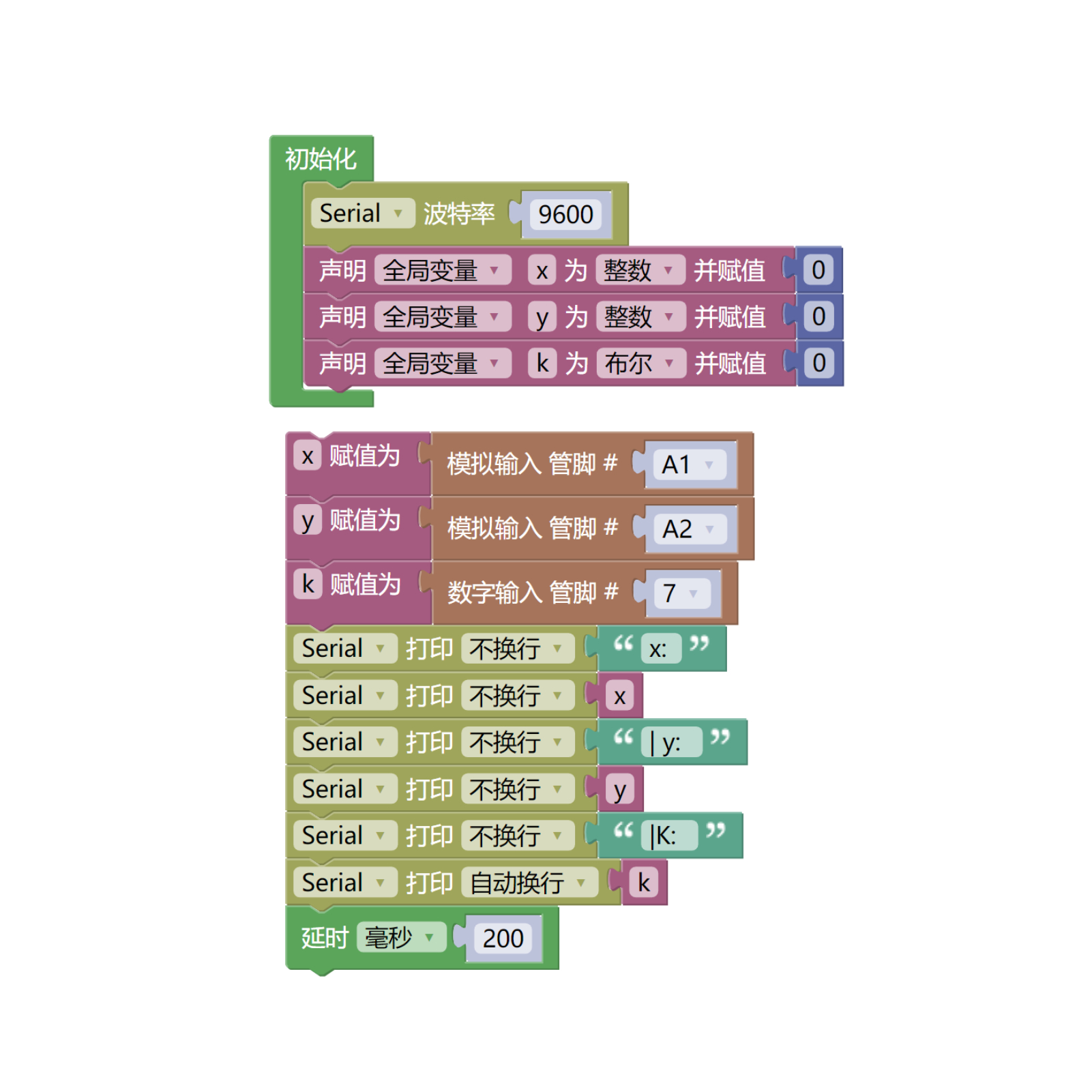
6、米思齐 Mixly 示例程序(图形化语言)
Arduino UNO Grafische Beispielprogramme:2、第二步将UNO开发板的库文件下载后解压在桌面。
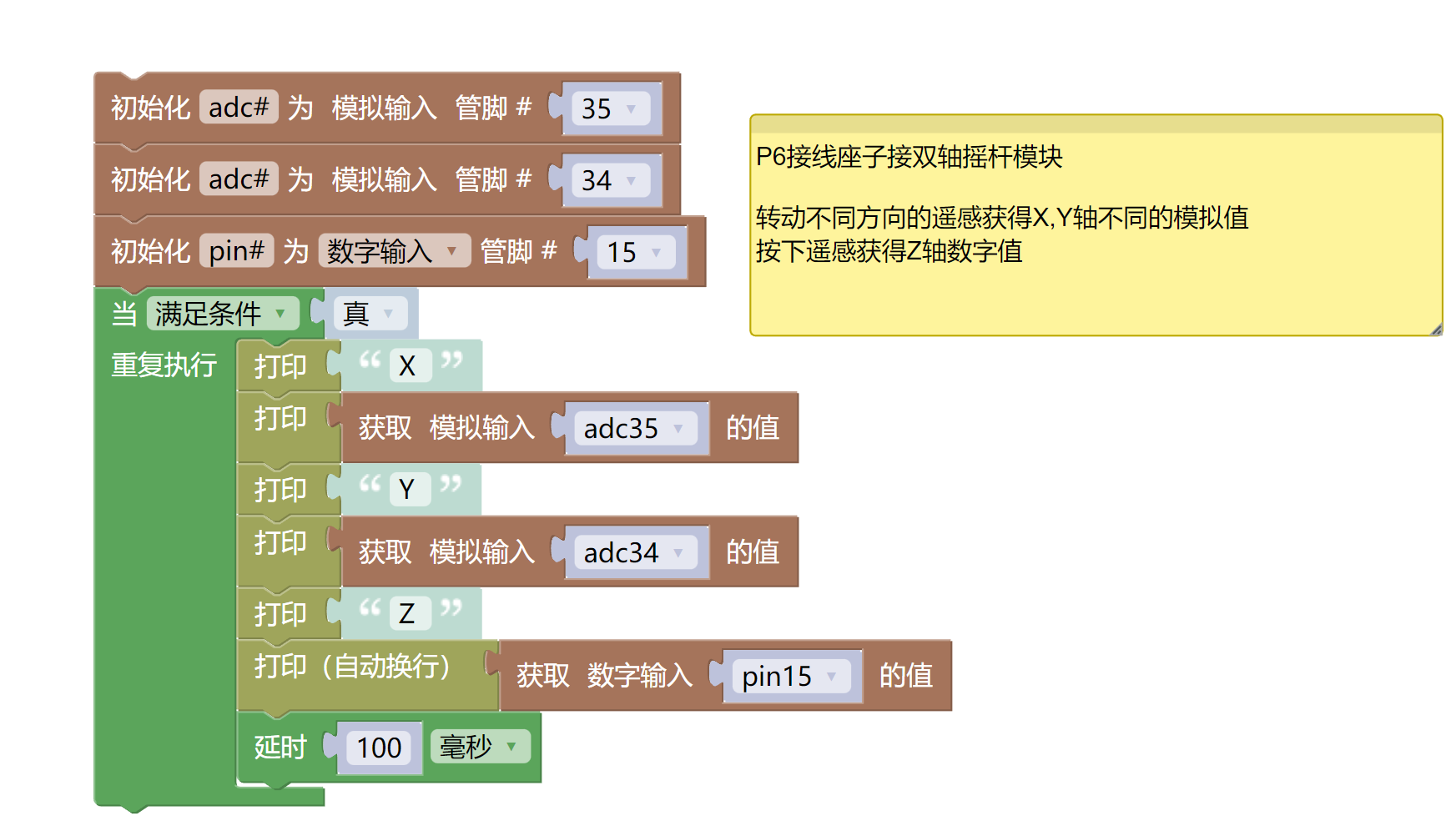
ESP32 Python-Grafikbeispielprogramm:2、第二步将UNO开发板的库文件下载后解压在桌面。
7, Aufbau des Testumgebungs
Testumgebung für Arduino UNO einrichten
Vorbereiten Sie die Komponenten:
HELLO STEM UNO R3 Entwicklungsplatine *1
HELLO STEM UNO R3 P Erweiterungsplatte *1
USB type-c Datenkabel *1
Dual-Axis Joystick Module (HS-S34L) *1
PH2.0 5P杜邦线 *1
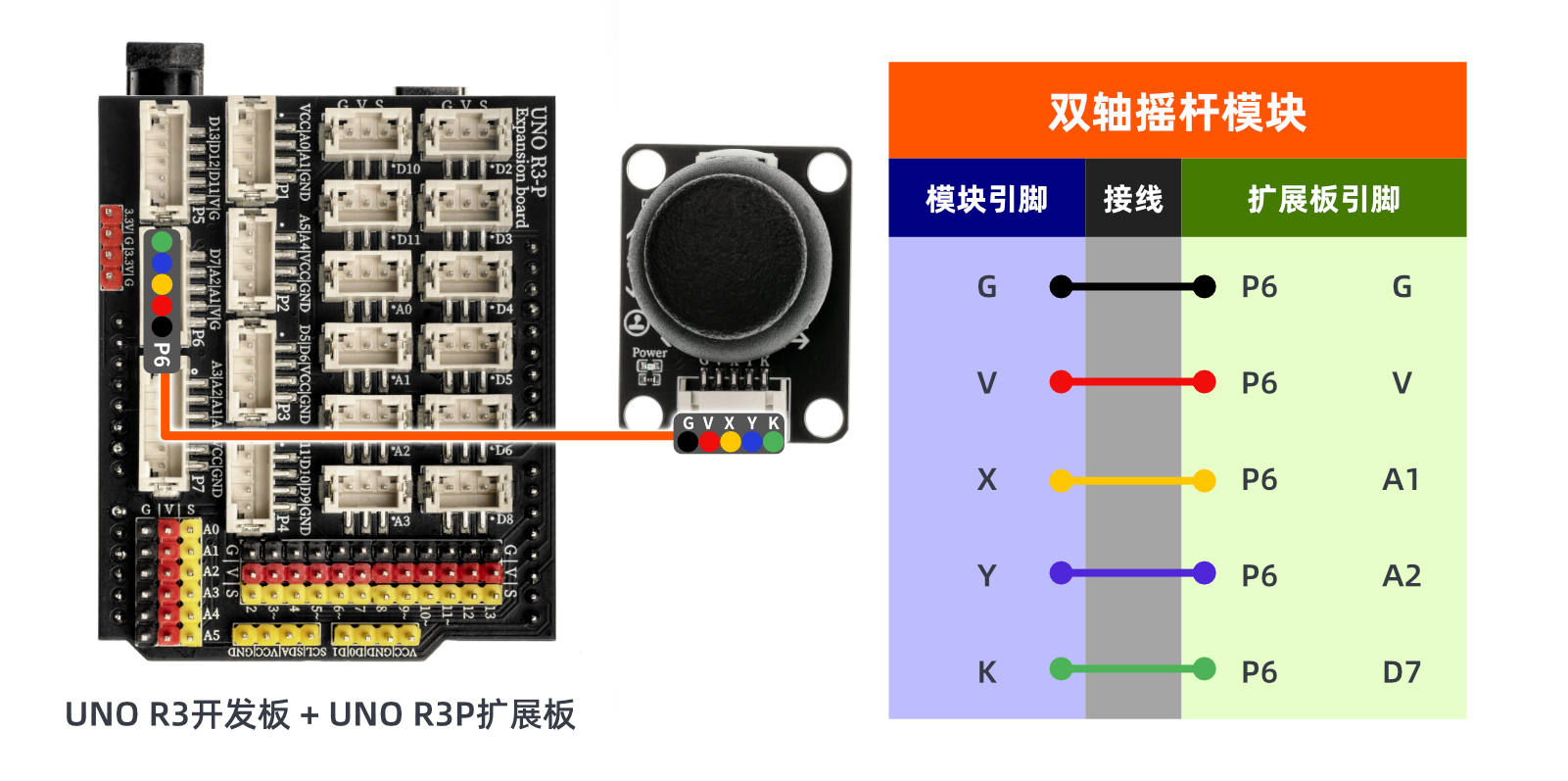
Schaltplan der Leitung:
ESP32 Python Testumgebung Einrichtung
8, Video-Tutorial
Arduino UNO Video-Tutorial:Klicken Sie zum Anzeigen
ESP32 Python Videoanleitung:
9, Testergebnis
Arduino UNO Testergebnis:

ESP32 Python-Testergebnis: