
1、Einführung
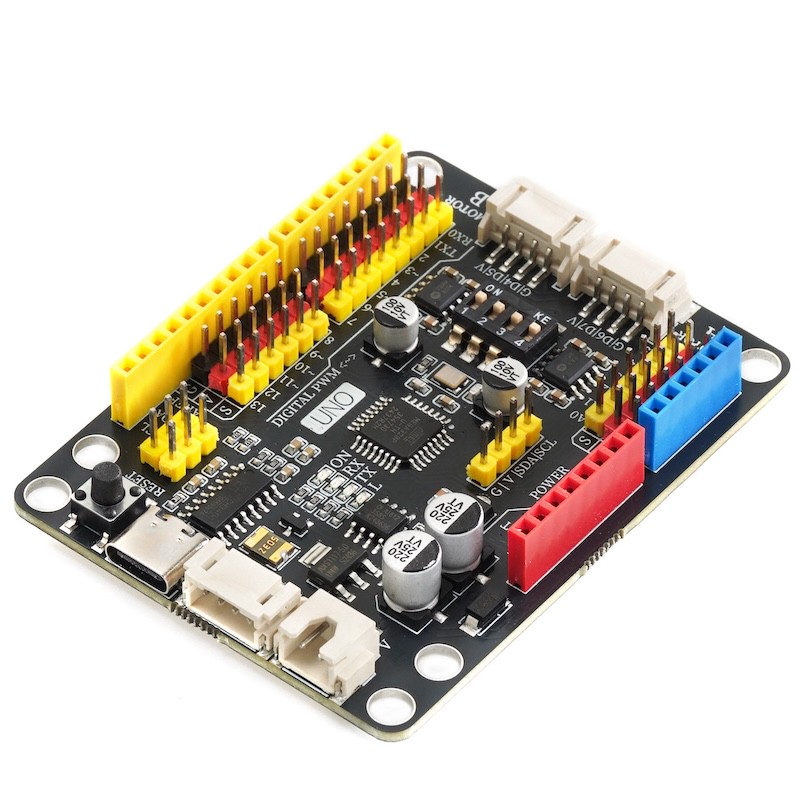
Dieses Arduino-Entwicklerboard ist speziell für Lego-Fans und Kreativen konzipiert und ist kompatibel mit Lego-Programmierungsbausteinen. Es kann leicht auf Lego-Technik- und MOC-Bausteinen montiert werden.Nicht nur das, es unterstützt auch LEGO-Batteriebetrieb, was Ihre Kreativität noch mobiler macht.
Dieses Entwicklungsboard verfügt über zwei Motorsteuerungen, die über das Programmieren gesteuert werden können, um Vorwärts- und Rückwärtsgang sowie Drehzahl zu kontrollieren. Die Ausgangsleistung beträgt bis zu 9V/2A und die Ausgangsschnittstelle ist mit den Lego-Motoranschlüssen kompatibel, was eine perfekte Unterstützung für Lego-Drehmotoren ermöglicht.Darüber hinaus ist der Motorstromausgang mit einem separaten Schalter ausgestattet, der es Ihnen ermöglicht, ihn zu steuern.
Es verfügt auch über eine 2,54-Zoll-Steckverbinder-Expansions-Schnittstelle, mit der Sie bequem mehr Sensorgeräte erweitern können und mehr Funktionen für Ihr Projekt hinzufügen können.
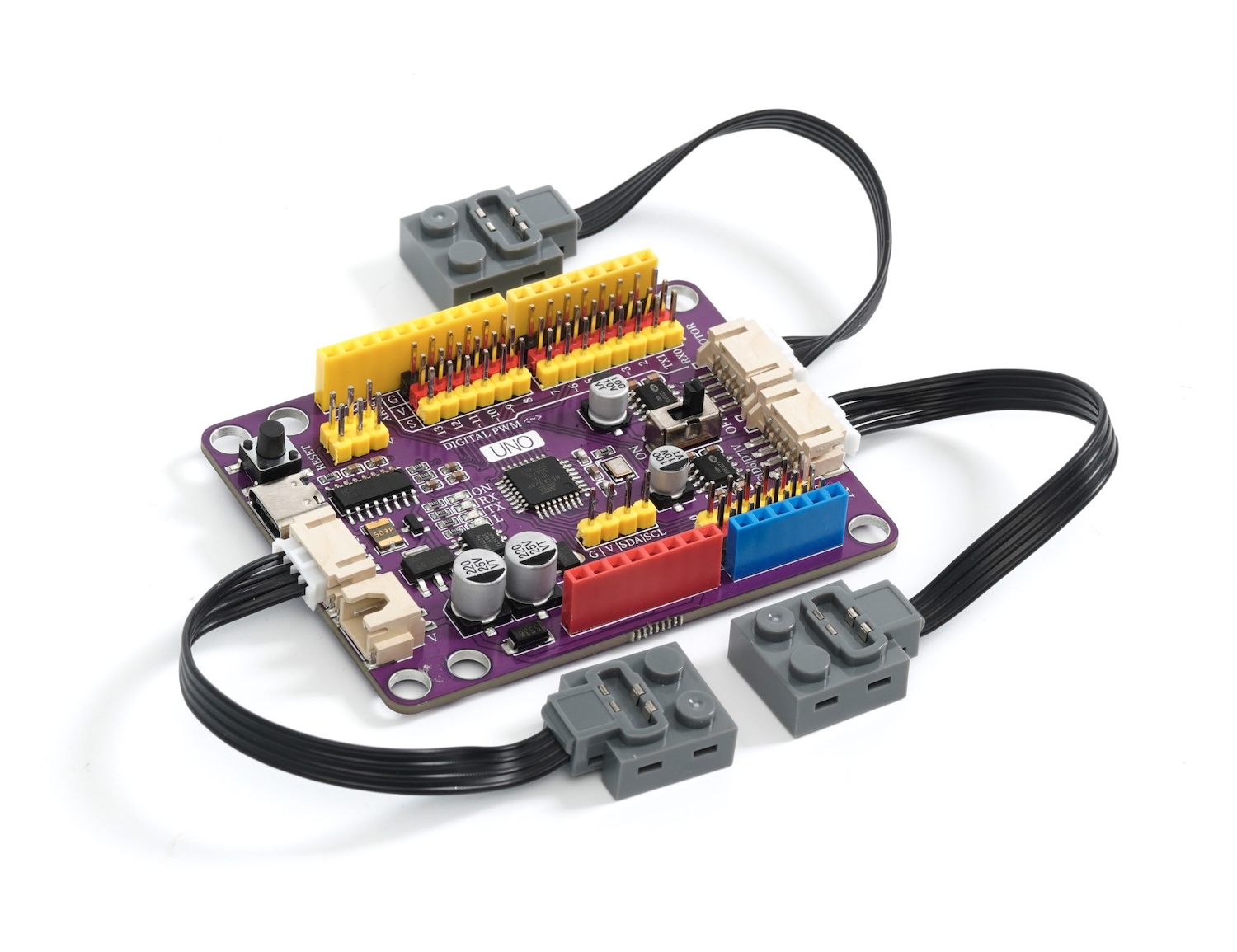
Wenn Sie die HS-UNO-EXP3 PH MOC Erweiterungsplatine verwenden, können Sie die PH2.0 Steckerkabel nutzen, um die Verbindung zwischen Entwicklungskarte und Sensor mit einem Kabel zu realisieren und den Verdrahtungsprozess zu vereinfachen.
Zusammengefasst bietet diese Arduino-Entwicklungsplatine, die mit Lego-Programmierungsbausteinen kompatibel ist, mehr Möglichkeiten für deine Lego-Kreationen und lässt deine Phantasie voll entfalten.Obwohl es sich um ein Roboterprojekt, ein intelligentes Gebäude oder andere kreative Werke handelt, wird es dein kreatives Potenzial unterstützen.Entdecken Sie die unendlichen Möglichkeiten der LEGO-Welt!
2、Technische Spezifikationen
Mikrocontroller: ATmega328P
Betriebsspannung: 5V
Eingangsspannung (empfohlen): 6-9V
Digitale Eingabe-/Ausgabepins: 14 Stück (davon können 6 Pins als PWM-Pins verwendet werden)
PWM-Pins: 6 Stück
Simulations-Eingangspins: 6 Stück
Eingabe-/Ausgabestecker-Direktstrom:20 Milliamper
3.3V-Stromleitung: 500 Milliamper
Flash Memory (Flash-Speicher): 32 KB
SRAM ( statische Speicher ): 2 KB
EEPROM: 1 KB
integrierte LED-Pin: 13
Download-Interface: USB Type-C
串口控制器:CH340C
支持的开发IDE:Arduino IED,Mixly,mblock, Scratch
3、Eigenschaften
Dies ist eine Arduino-Entwicklungsplatine, die mit LEGO-Programmierungsteilen kompatibel ist und auf LEGO-Technik- und MOC-Steinen installiert werden kann.
Die Entwicklungsplatine wird von LEGO-Batterien versorgt.
Entwicklungsboard mit zwei integrierten Motorsteuerungen, die über Programmierung die Vorwärts- und Rückwärtsrichtung sowie die Drehzahl steuern können, Ausgangsleistung von 9V/2A, Ausgangsschnittstelle kompatibel mit Lego-Motoranschlüssen, unterstützt Lego-Drehmotoren, der Motorstromausgang wird mit einem separaten Schalter gesteuert.
Mit 2,54-Zoll-Abstand versehene G-V-S-Stecker-Verlängerungsstecker, um mehr Sensoreinheiten zu erweitern, praktisch.
Kombinieren Sie das HS-UNO-EXP3 PH MOC Erweiterungsboard, Sie können das PH2.0 Steckerkabel verwenden, um die Verbindung zwischen der Entwicklungsplatine und dem Sensor mit einem Kabel herzustellen.
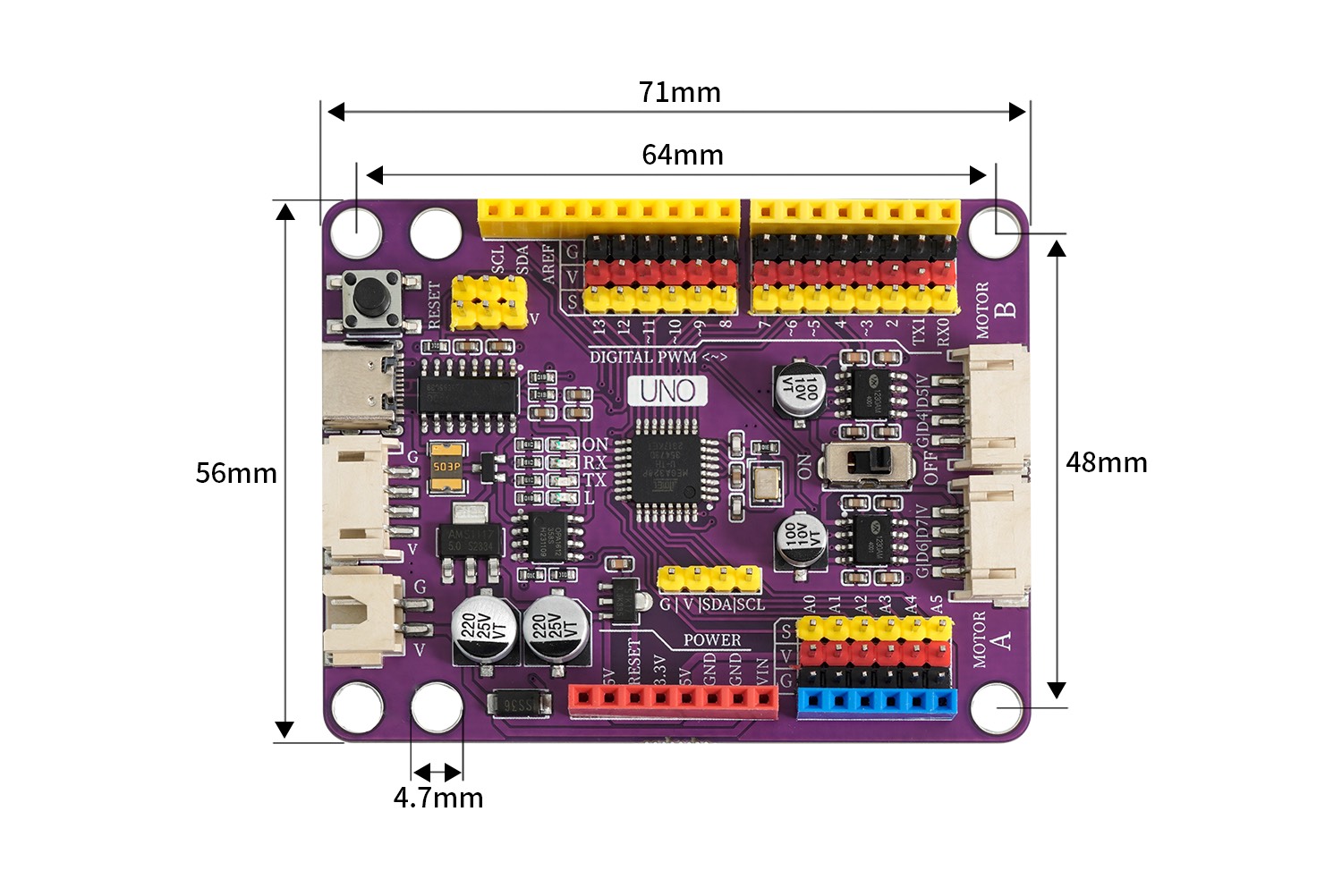
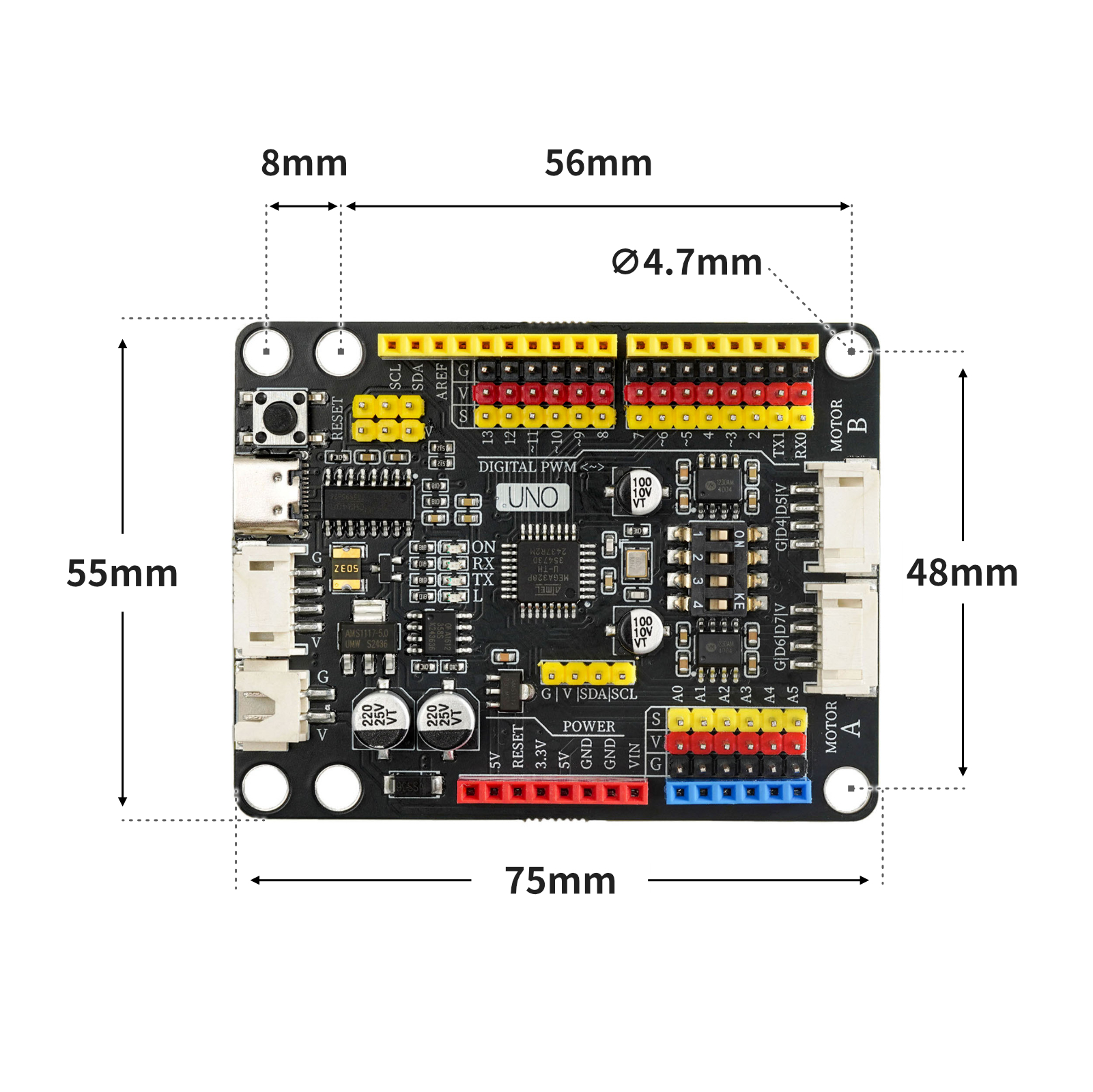
4, Platinegröße
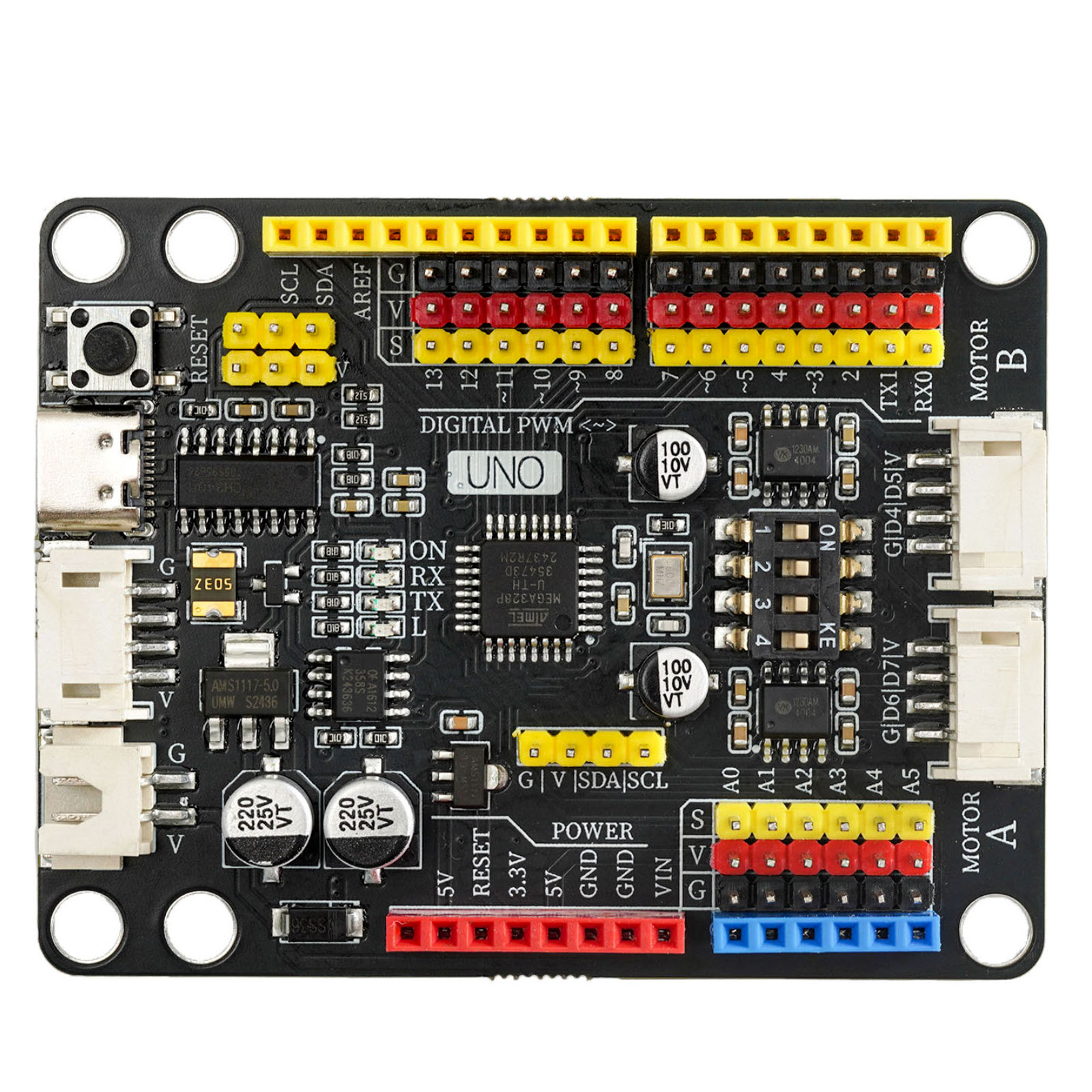
5、Entwicklungsboard-Decodierung
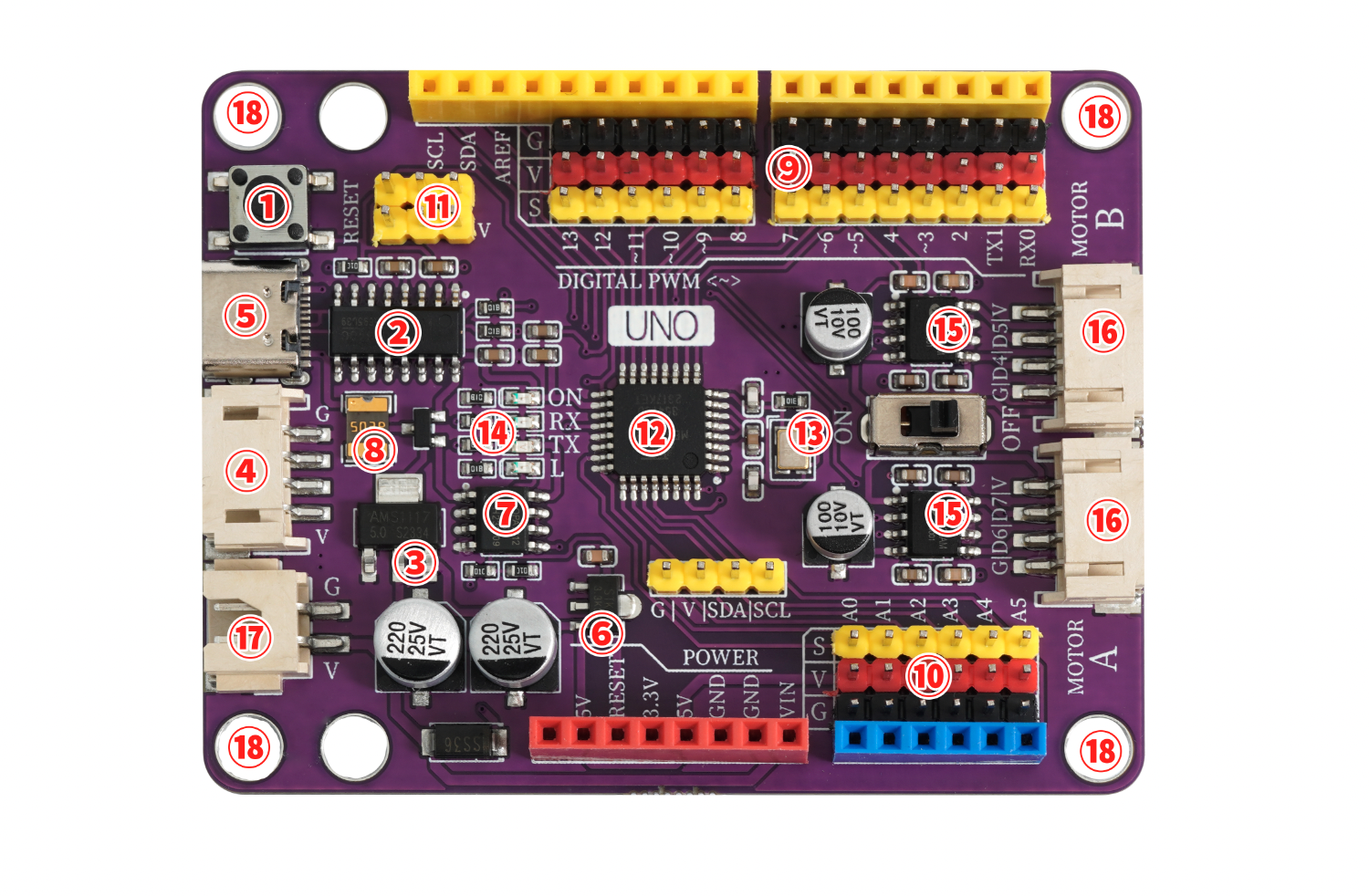
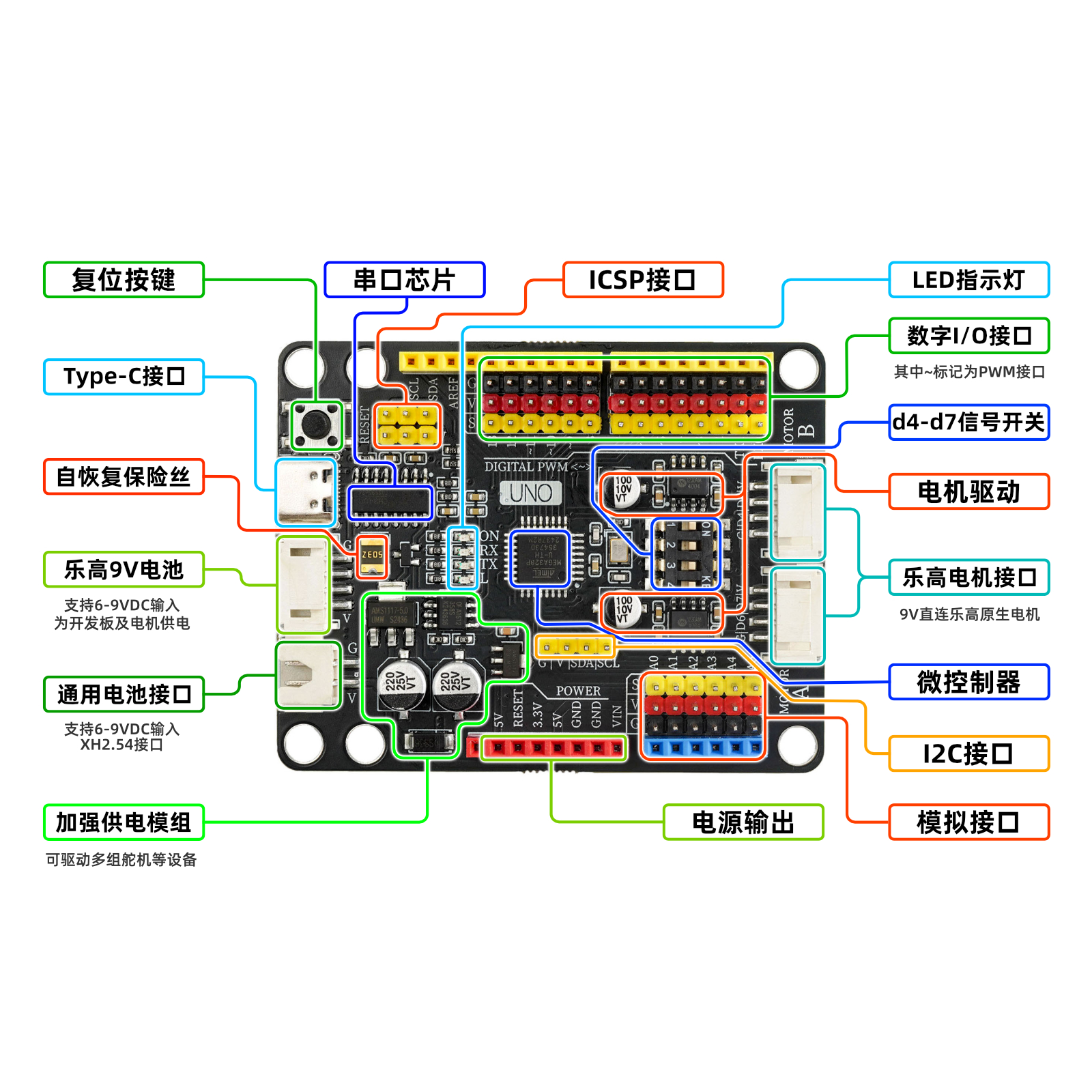
① Reset-Taste
Drücken Sie die Reset-Taste, um das Programm neu zu starten.② USB-Serielschnittstelle
Der Chip ist verantwortlich für die Umwandlung der vom USB empfangenen Daten in Seriendaten für den Hauptchip.③5V/1A Stromversorgungsmodul
Der Strommodul ist verantwortlich für die Stromversorgung der Hauptplatine, die 6-12V externen Spannungseingang wird auf 5V/2A/10W Spannungsregler ausgegeben, kann mehrere Gruppen von Servomotoren, Spielmotoren, Mikro-Plattformen und andere Geräte ansteuern.④PH2.0 4P Stromanschluss (kompatibel mit Lego Batterieboxen)
Das Interface ist kompatibel mit dem LEGO-Batteriebox-Kabelprotokoll und kann mit dem beiliegenden Stromkabelanschluss mit der LEGO-Batteriebox verbunden werden.Der Ausgangsstrom dieses Interfaces beträgt 6-9V, abhängig von Ihrem Eingangsstrom.⑤USB-Anschluss
USB Type-C-Anschluss, verantwortlich für Daten herunterladen und USB-Stromversorgung.⑥3,3V Stromversorgungshalbleiter
Bietet der Entwicklungsplatine 3,3V Spannungsausgang.⑦Automatischer Umschalter zwischen externer Stromversorgung und USB-Stromversorgung.
FDN340P Feldeffekttransistor + LMV358IDGKR Verstärker组成的外部給電とUSB給電自動切換制御システム。Die Entwicklungskarte wird standardmäßig über den USB-Anschluss mit Strom versorgt. Wenn externe Spannung zugeführt wird, schaltet der Controller automatisch vom USB-Stromversorgung ab und schaltet auf die externe Spannungsversorgung um. Wenn die externe Spannung unterbrochen wird, schaltet sie automatisch zurück auf die USB-Stromversorgung. Diese Funktion schützt den Computer vor Störungen durch die externe Stromversorgung der Entwicklungskarte.⑧Selbstaufheilende Sicherungswiderstände
Wenn die Entwicklungsplatine aufgrund eines fehlerhaften Verbindungsfehlers einen Kurzschluss verursacht, schaltet der Sicherungsdraht automatisch die Stromverbindung zwischen der Entwicklungsplatine und dem Computer unterbrochen, um den Computer-USB-Anschluss vor dem Verbrennen oder dem Absturz des Computers zu schützen.⑨ 数字 G|V|S 扩展接口 in Deutsch
Die auf dem Board befindliche G|V|S-Schnittstelle ist beim Verbinden von Sensoren oder Aktoren bequemer und schneller, und es ist auch kein Erweiterungsboard mehr erforderlich, um ein Projekt aufzubauen.G ist der negative Pol des GND-Stromversorgungsanschlusses, V ist der positive Pol des VCC-Stromversorgungsanschlusses, S ist der IO-Signalanschluss, G/V liefert eine Ausgangsleistung von 5V/2A, was den Strombedarf der meisten Sensoren und Aktoren deckt.⑩ 模拟 G|V|S 扩展接口 in Deutsch
Das onboarde Simulationsmodul G|V|S für die Verbindung mit den Simulationssensoren ist bequemer und schneller, es gibt neue Analogeingangsschnittstellen A6 und A7, um mehr Sensoren anzuschließen.⑪ICSP-Serialdaten-Schnittstelle
Initialisierungsprogramm für die Entwicklungsplatine schreiben oder diesen Anschluss beim Download der Programme mit dem Compiler verbinden.⑫ ATMEGA328P-Mikrocontroller
ATMEGA328P Hauptkontrollchip ist das Gehirn der Entwicklungsplatine, verantwortlich für die Programm speichern, ausführen, Berechnung und Verarbeitung, Signal Eingang und Ausgang und andere Funktionen.⑬Oszillator
Stellt dem ATMEGA328P-Mikrocontroller eine Taktzeit zur Verfügung。⑭LED-Indikatorleuchte
Bordmounted 4 LED indicators, (ON) as power indicator, lights up when powered on, (RX)(TX) as serial port signal indicators, the LED light flashes when there is serial port signal communication, (L) as D13 pin light, the light turns on when the D13 signal is high.⑮Motor, Antriebshalbleiter und Antriebschalter
Brettgehäuse mit zwei D-Steuerchips, Ausgangsleistung 9V |2A, unterstützt PMW-Geschwindigkeitssteuerung, in der Mitte des Steuerchips befindet sich ein Schiebeschalter, um zu steuern, ob der Motorantrieb arbeitet oder nicht.⑯Motor, Motoranschluss
Der Motoranschluss verwendet einen PH2.0 4P Steckeranschluss, der mit der Steckerleitung des Lego-Motors kompatibel ist. Mit dem beiliegenden Adapterkabel kann der Motor direkt mit dem Lego-Motor verbunden werden.⑰XH2.54 Stromstecker
Dieser Stecker wird hauptsächlich zur Verbindung mit Lithium-Ionen-Akkus mit Spannungen von 6 bis 9V verwendet.⑱Lego Baustein Montagebohrung
Befestigungslöcherdurchmesser 4,7 mm, voll kompatibel mit Lego-Steinen.
Notwendigkeit
HELLO STEM UNO MOC Driver hat eine wiederherstellbare Mehrsicherung und schützt den USB-Anschluss des Computers vor Kurzschluss und Überstrom.Wenn über 1A Strom auf den USB-Anschluss gelegt wird, schaltet der Sicherungszylinder automatisch ab, bis der Kurzschluss oder die Überlastung beseitigt ist.
6. Spezial Lego-Motor, Motor-Anschluss
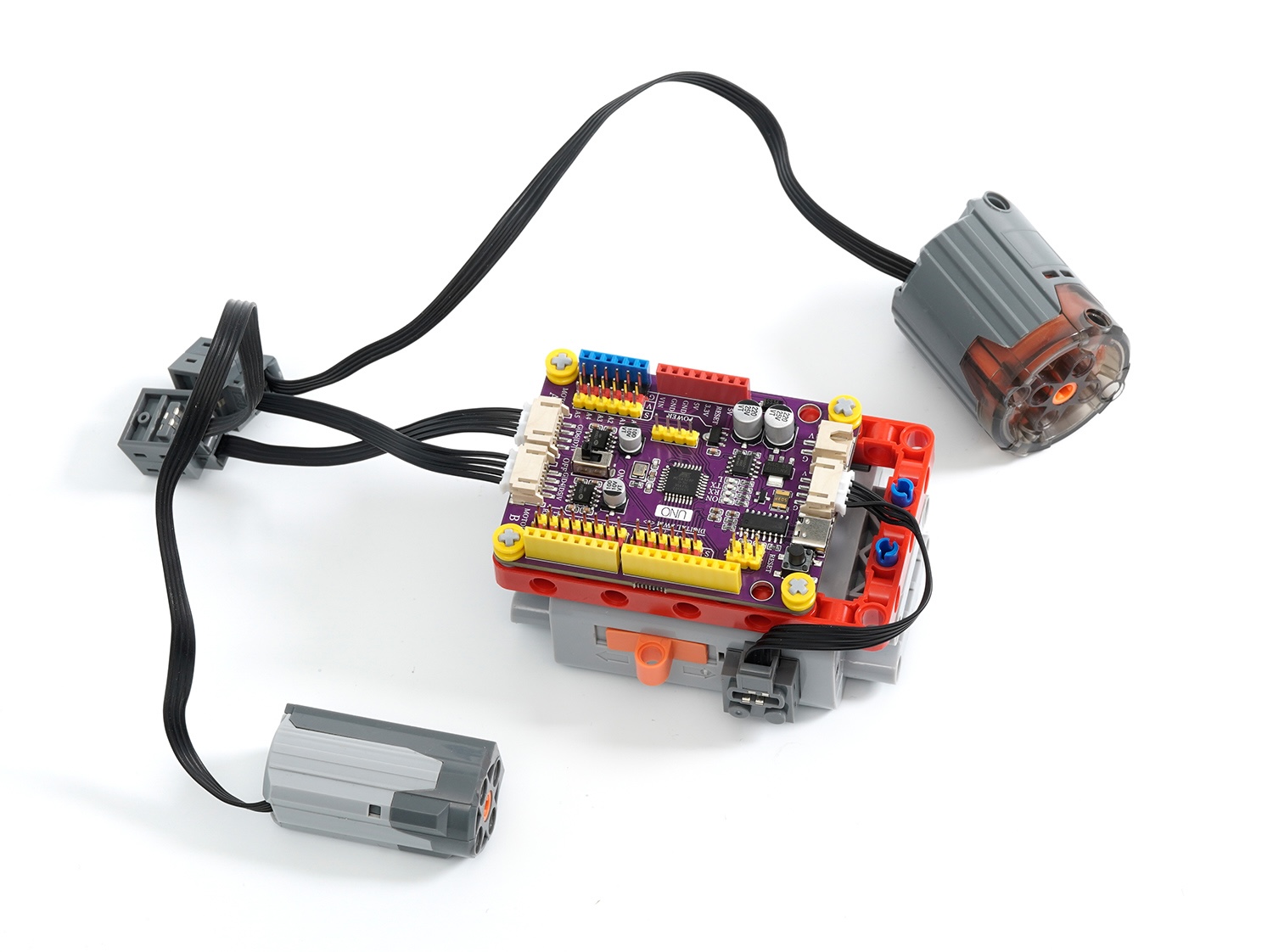
Der Motoranschluss verwendet einen PH2.0 4P Steckeranschluss, der mit der Steckerleitung des Lego-Motors kompatibel ist. Mit dem beiliegenden Adapterkabel kann der Motor direkt mit dem Lego-Motor verbunden werden.
7、Sensor- und Erweiterungsanschlüsse
Die G|V|S-Schnittstelle ist beim Verbinden von Sensoren oder Aktoren bequemer und schneller, und es ist auch kein Erweiterungsboard mehr erforderlich, um Projekte zu erstellen.G/V bietet eine Ausgangsleistung von 5V/2,5A, die den Strombedarf der meisten Sensoren und Aktoren deckt.
8. Erweiterungsplatte hinzufügen
Erweiterungsplatten hinzufügen, Sie können die PH2.0 Steckerleitung nutzen, um die Verbindung zwischen Entwicklungskarte und Sensor mit einer Linie zu realisieren, den Kabelverbindungsvorgang zu vereinfachen und Anfänger leichter einzuführen.
9、Treiber Herunterladen und Installieren
Windows 7, 8, 10, 11 System USB-Treiber Herunterladen und Installationsmethoden:Klicken Sie zum Anzeigen
Mac OS Systems USB Treiber Herunterladen:CH34X USB-Serie Mac OS Treiber Download- und Installationsanleitung
10、Beispiel aufbauen und Beispielprogramm
1、Brettmotor/Motordrive-Test
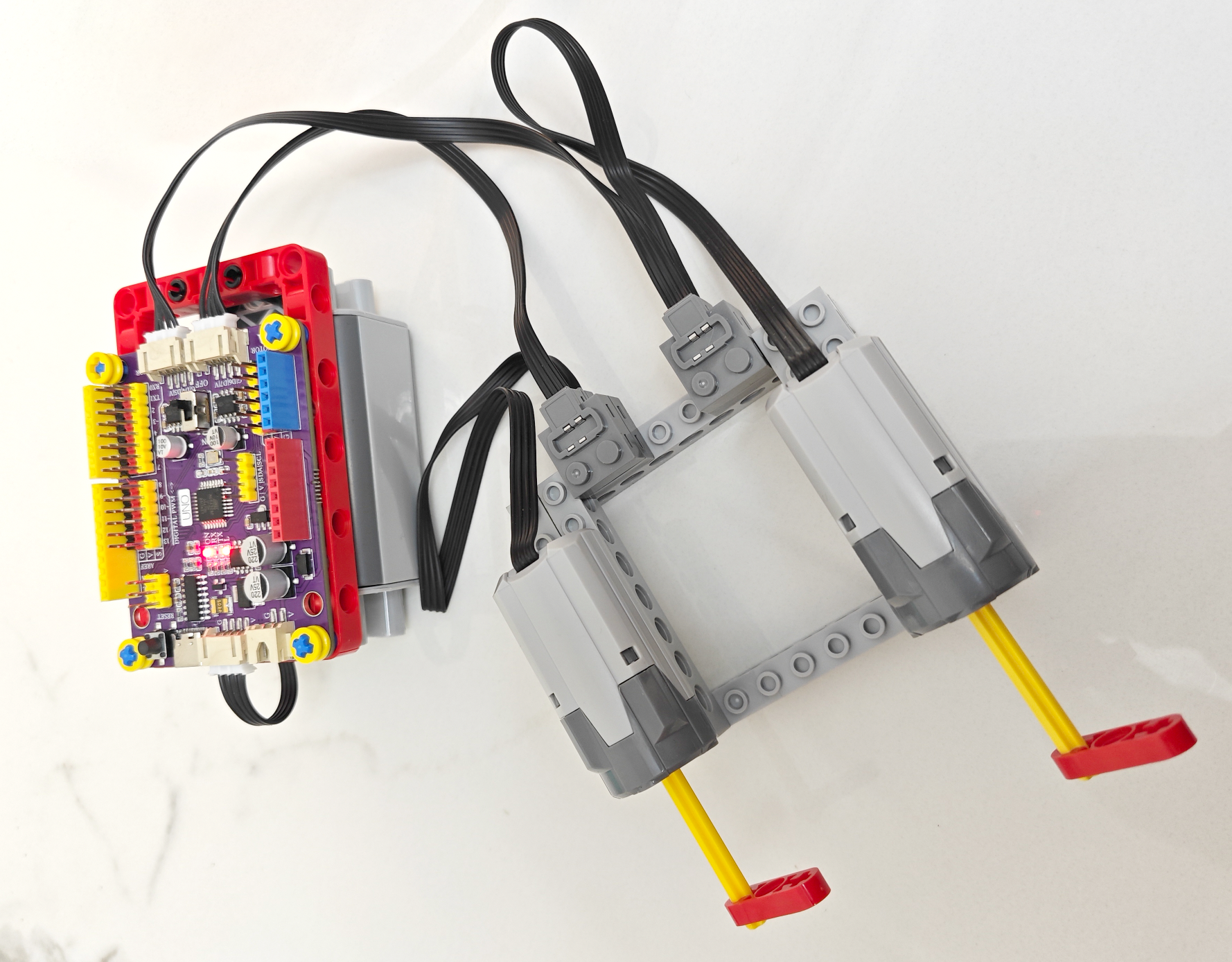
Achtung: Der Akku-Box des Legos 9686 gibt 9V aus, die Antriebsquelle des Motors ist direkt an den Eingangsstecker der Akku-Box des 9686 angeschlossen, die Antriebsspannung ist gleich der Akkuspannung, daher kann der Board-Steuerung nur mit kompatiblen Lego-Motoren/Motoren verbunden werden, und nicht-kompatible Lego-Motoren können nach dem Stromverschluss beschädigt werden.
Da Stromverbrauch der Lego-Motoren ist relativ hoch, daher wird empfohlen, die Nanfu-Batterien zu verwenden, andere Batterien funktionieren aufgrund des geringeren Stroms nicht ordnungsgemäß.
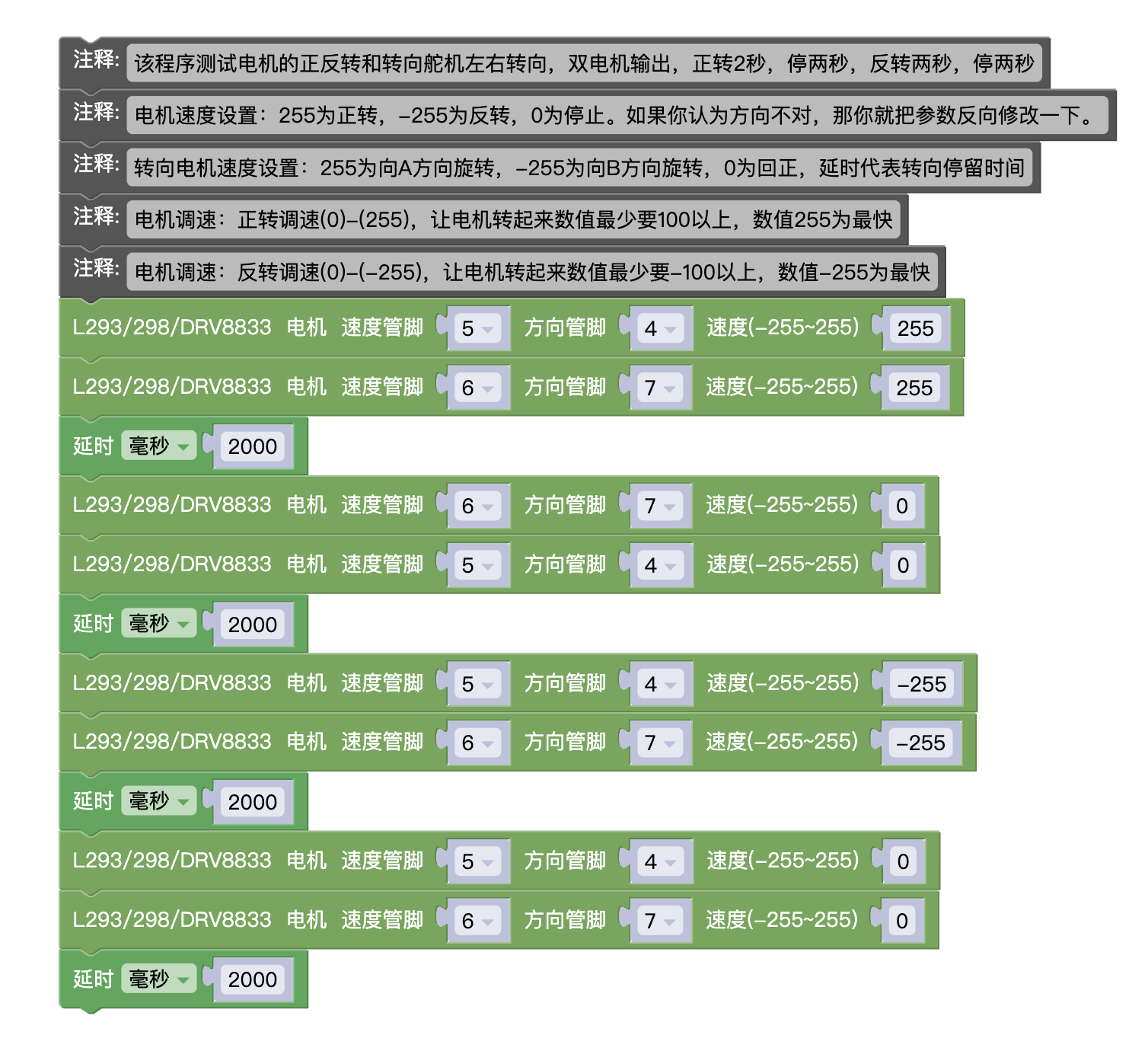
Mixly 米思齐测试程序1:2、第二步将UNO开发板的库文件下载后解压在桌面。
Bitte beachten Sie: 1. Dieses Programm ist geeignet zum Testen von Lenk- und Motoren, da keine Bremssoftware hinzugefügt wurde. Beim Testen des Motors wird die Drehmomentinertie des Motors die Genauigkeit des Drehens beeinträchtigen.
2、开发板不稳定的情况通常是因为电池供电不足,请将速度值设置得更低,例如(200)或(-200)
Arduino IDE Testprogramm 1 (Kopieren Sie den folgenden Code in den IDE-Editor und laden Sie ihn hoch)
Achtung: 1. Dieses Programm ist nur für den Test von M-Nummer-Motoren und Lenkmotoren geeignet, da keine Bremsprogramme hinzugefügt wurden. Beim Test der Motoren beeinflusst die Drehmomentinertia der Motoren die Drehgenauigkeit.
2、开发板不稳定的情况通常是因为电池供电不足,请将速度值设置得更低,例如(200)或(-200)
//该程序测试电机的正反转和转向舵机左右转向,双电机输出,正转2秒,停两秒,反转两秒,停两秒
//电机速度设置:255为正转,-255为反转,0为停止。如果你认为方向不对,那你就把参数反向修改一下。
//转向电机速度设置:255为向A方向旋转,-255为向B方向旋转,0为回正,延时代表转向停留时间
//电机调速:正转调速(0)-(255),让电机转起来数值最少要100以上,数值255为最快
//电机调速:反转调速(0)-(-255),让电机转起来数值最少要-100以上,数值-255为最快
void setMotor8833(int speedpin, int dirpin, int speed) {
if (speed == 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, 0);
} else if (speed > 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, speed);
} else {
digitalWrite(dirpin, HIGH);
analogWrite(speedpin, 255 + speed);
}
}
void setup(){
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
digitalWrite(5, LOW);
digitalWrite(4, LOW);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
}
void loop(){
setMotor8833(5, 4, 255);
setMotor8833(6, 7, 255);
delay(2000);
setMotor8833(6, 7, 0);
setMotor8833(5, 4, 0);
delay(2000);
setMotor8833(5, 4, -255);
setMotor8833(6, 7, -255);
delay(2000);
setMotor8833(5, 4, 0);
setMotor8833(6, 7, 0);
delay(2000);
}Mixly 米思齐 Testprogramm 2:2、第二步将UNO开发板的库文件下载后解压在桌面。
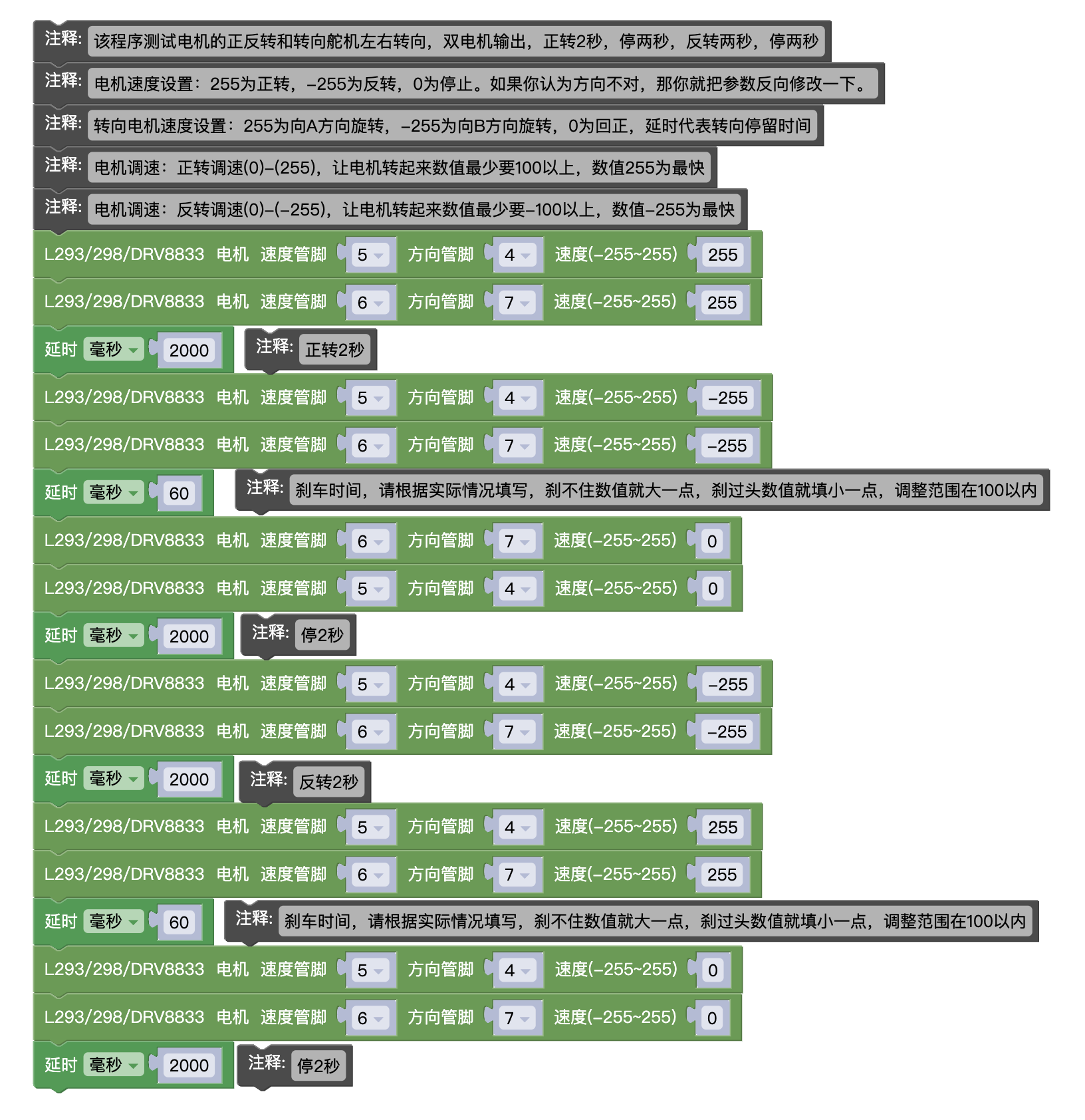
Achtung: 1. Dieses Programm ist speziell für den Motorprüfungsversuch bestimmt und geeignet für die Prüfung der Motoren M, L, XL, bei der Prüfung sollte die Bremszeit nach实际情况进行调整
2、开发板不稳定的情况通常是因为电池供电不足,请将速度值设置得更低,例如(200)或(-200)
Arduino IDE Testprogramm 2 (Kopieren Sie den folgenden Code in den IDE-Editor und laden Sie ihn hoch)
Hinweis: 1、Dieses Programm ist speziell zum Testen von Motoren entwickelt und geeignet für die Tests von Motoren der Größen M, L, XL. Bitte passen Sie die Bremszeit während des Tests entsprechend der tatsächlichen Situation an
2、开发板不稳定的情况通常是因为电池供电不足,请将速度值设置得更低,例如(200)或(-200)
void setMotor8833(int speedpin, int dirpin, int speed) {
if (speed == 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, 0);
} else if (speed > 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, speed);
} else {
digitalWrite(dirpin, HIGH);
analogWrite(speedpin, 255 + speed);
}
}
void setup(){
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
digitalWrite(5, LOW);
digitalWrite(4, LOW);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
}
void loop(){
setMotor8833(5, 4, 255);
setMotor8833(6, 7, 255);
delay(2000);
setMotor8833(5, 4, -255);
setMotor8833(6, 7, -255);
delay(60); //刹车时间
setMotor8833(6, 7, 0);
setMotor8833(5, 4, 0);
delay(2000);
setMotor8833(5, 4, -255);
setMotor8833(6, 7, -255);
delay(2000);
setMotor8833(5, 4, 255);
setMotor8833(6, 7, 255);
delay(60); //刹车时间
setMotor8833(5, 4, 0);
setMotor8833(6, 7, 0);
delay(2000);
}