
1、介绍
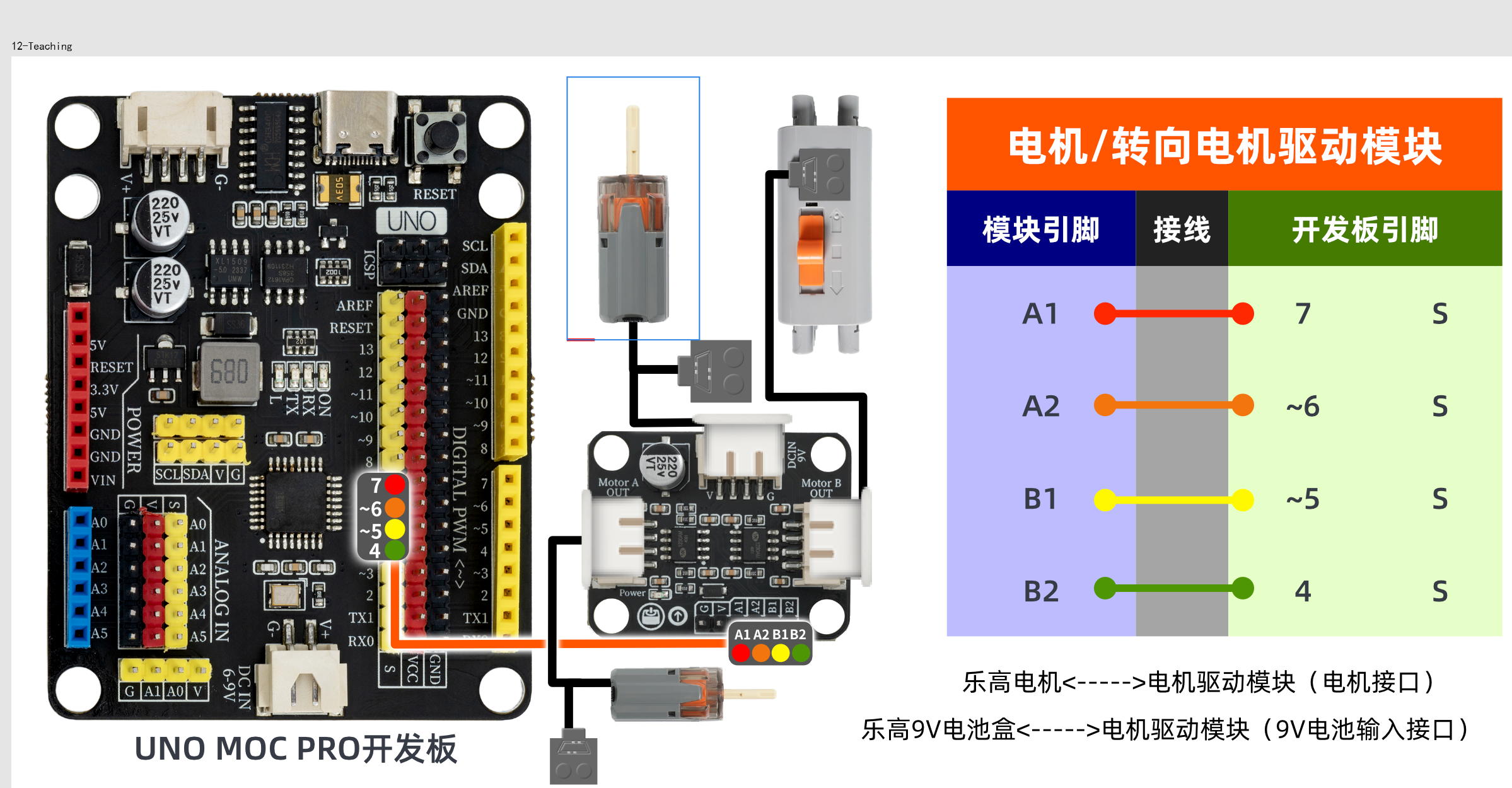
这是一款专为乐高科技积木电机和转向电机开发的电机驱动板,兼容大部分乐高电机,同时也支持乐高电池供电。你可以通过单片机的两个IO口高低电平来控制乐高电机的转动和停止,也可以控制乐高转向电机,切换两个IO口的高低电平,就可以实现正反转。同时可以使用PWM脉冲宽度来调节电机转速,电压低于一定值时马达无法转动。
2、原理图
3、模块参数
引脚名称 | 描述 |
|---|---|
G | GND(电源输入负极) |
V | VCC(电源输入正极) |
B2 | 电机B信号引脚 |
B1 | 电机B信号引脚 |
A2 | 电机A信号引脚 |
A1 | 电机A信号引脚 |
供电电压:5V-9V
连接方式:2.54针脚4P 双头杜邦线
安装方式:双螺丝固定/乐高搭建
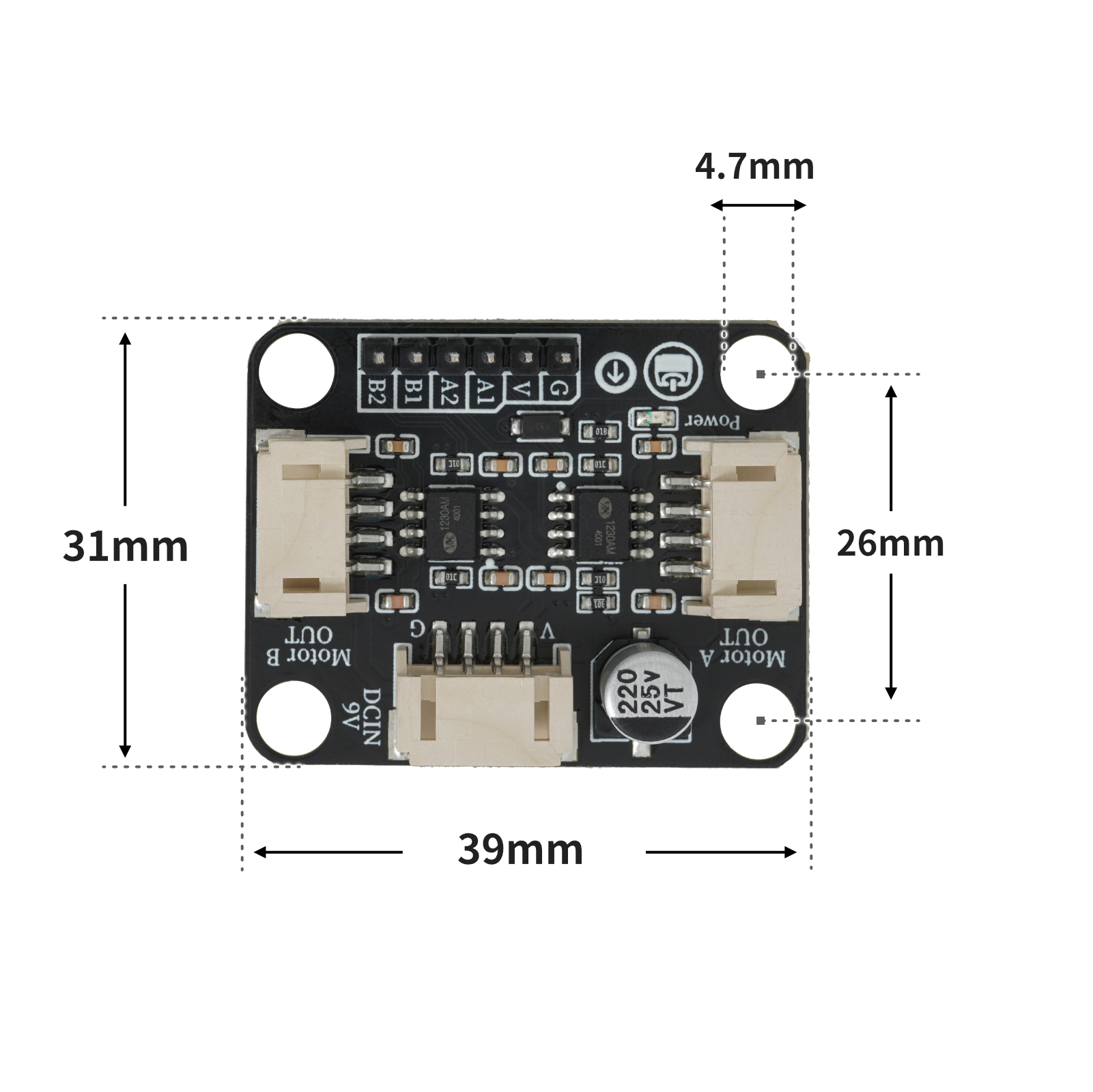
4、电路板尺寸
5、Arduino IDE示例程序
注意:程序上传时如果提示库文件报错,请先导入库文件!
Arduino IDE 库文件下载及导入教程:点击查看
示例程序(UNO开发板):
void setMotor8833(int speedpin, int dirpin, int speed) {
if (speed == 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, 0);
} else if (speed > 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, speed);
} else {
digitalWrite(dirpin, HIGH);
analogWrite(speedpin, 255 + speed);
}
}
void procedure2() {
}
void procedure() {
}
void setup(){
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
digitalWrite(5, LOW);
digitalWrite(4, LOW);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
}
void loop(){
setMotor8833(5, 4, 200);
setMotor8833(6, 7, 200);
delay(3000);
setMotor8833(5, 4, 0);
setMotor8833(6, 7, 0);
delay(1000);
setMotor8833(5, 4, -200);
setMotor8833(6, 7, -200);
delay(3000);
setMotor8833(5, 4, 0);
setMotor8833(6, 7, 0);
delay(1000);
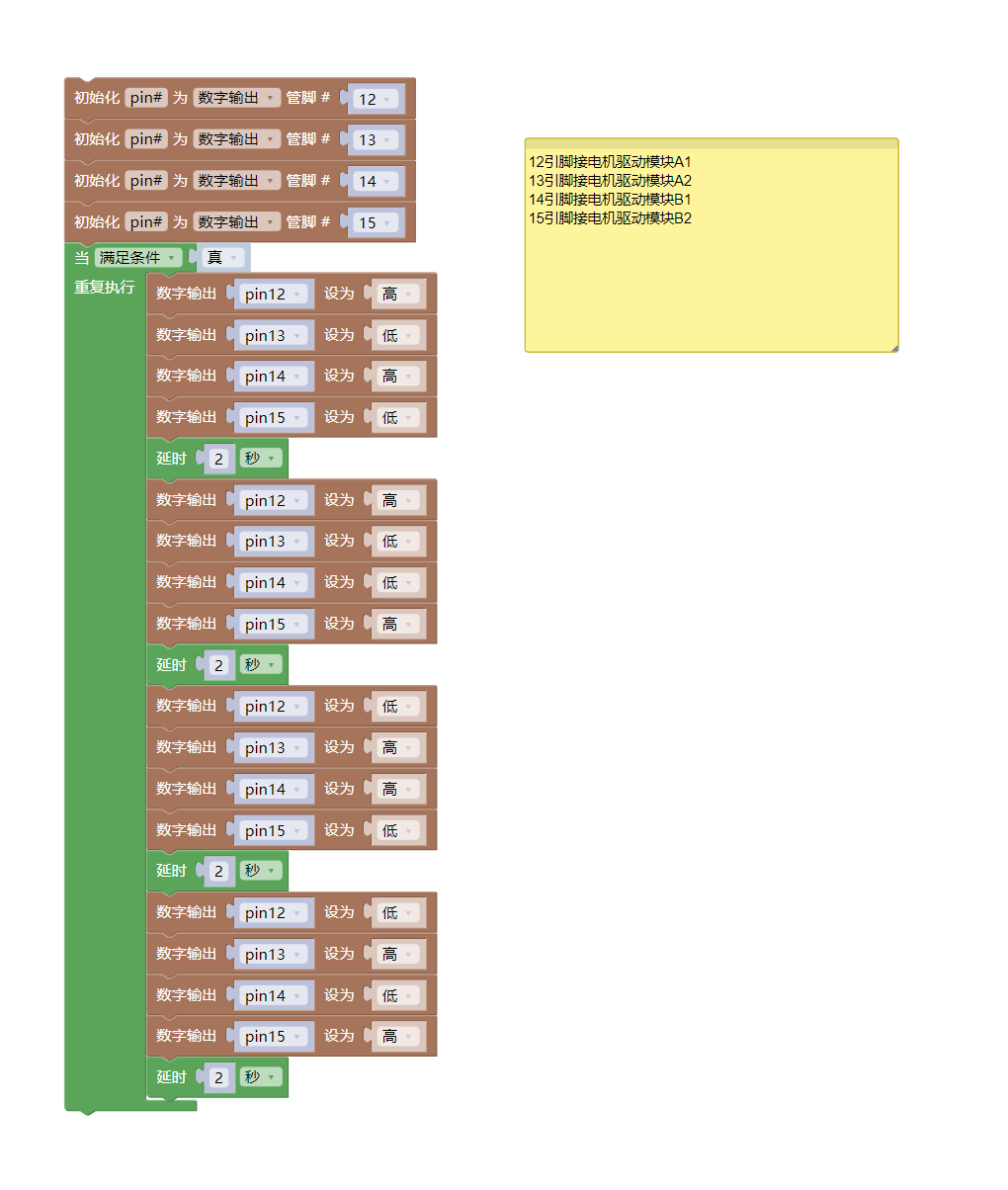
}6、ESP32 Python 示例(适用于Mixly IDE /米思齐)
开发板选择 Python ESP32 【ESP32 Generic(4MB)】切换为代码模式上传
注意:程序上传时如果提示库文件报错,请先导入库文件!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:点击查看
示例程序(ESP32-Python):
import machine
import time
pin12 = machine.Pin(12, machine.Pin.OUT)
pin13 = machine.Pin(13, machine.Pin.OUT)
pin14 = machine.Pin(14, machine.Pin.OUT)
pin15 = machine.Pin(15, machine.Pin.OUT)
while True:
pin12.value(1)
pin13.value(0)
pin14.value(1)
pin15.value(0)
time.sleep(2)
pin12.value(1)
pin13.value(0)
pin14.value(0)
pin15.value(1)
time.sleep(2)
pin12.value(0)
pin13.value(1)
pin14.value(1)
pin15.value(0)
time.sleep(2)
pin12.value(0)
pin13.value(1)
pin14.value(0)
pin15.value(1)
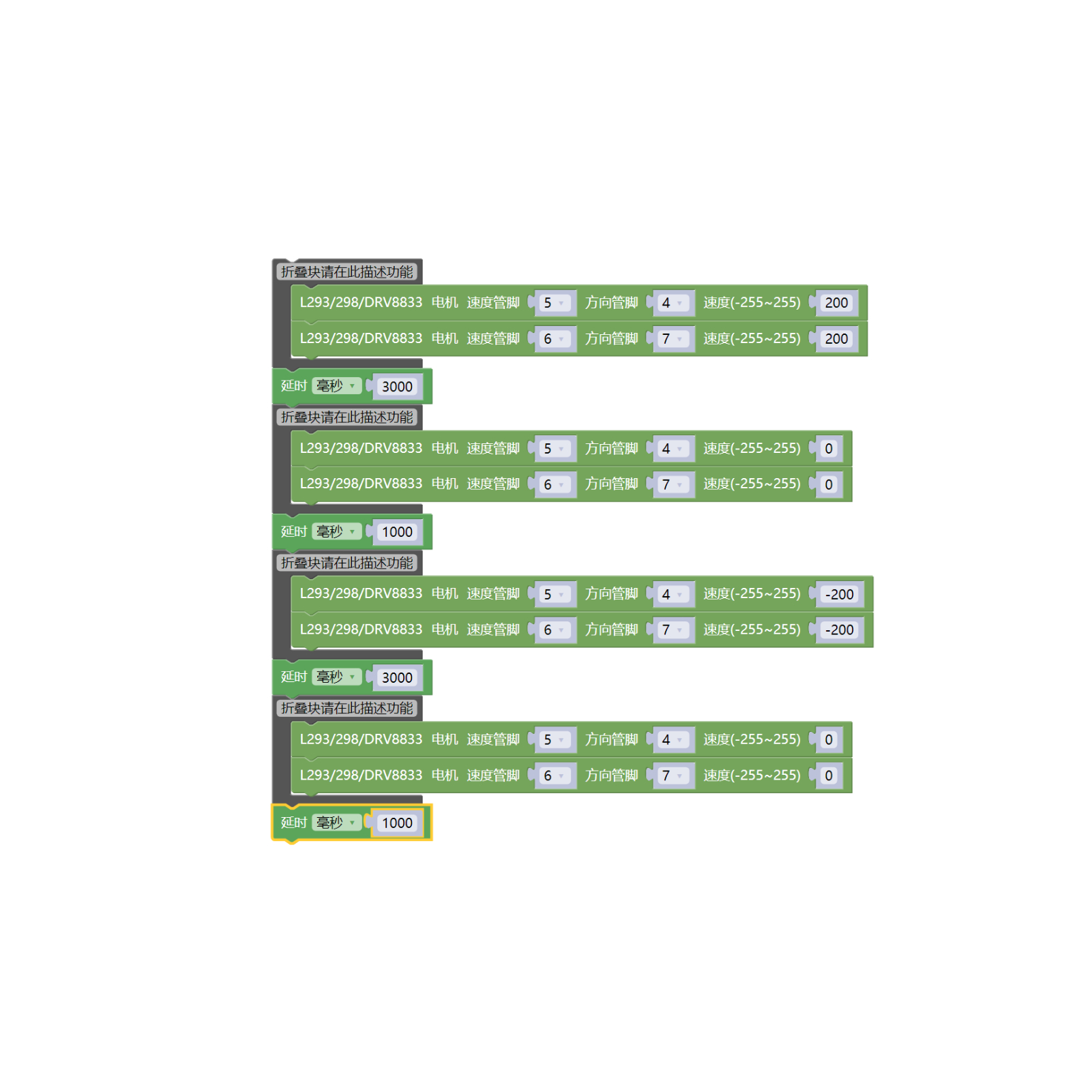
time.sleep(2)7、米思齐 Mixly 示例程序(图形化语言)
示例程序(UNO开发板):点击下载
注意:程序上传时如果提示库文件报错,请先导入库文件!
米思齐(Mixly)IDE Arduino库文件下载及导入教程:点击查看
示例程序(ESP32开发板):点击下载
注意:程序上传时如果提示库文件报错,请先导入库文件!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:点击查看
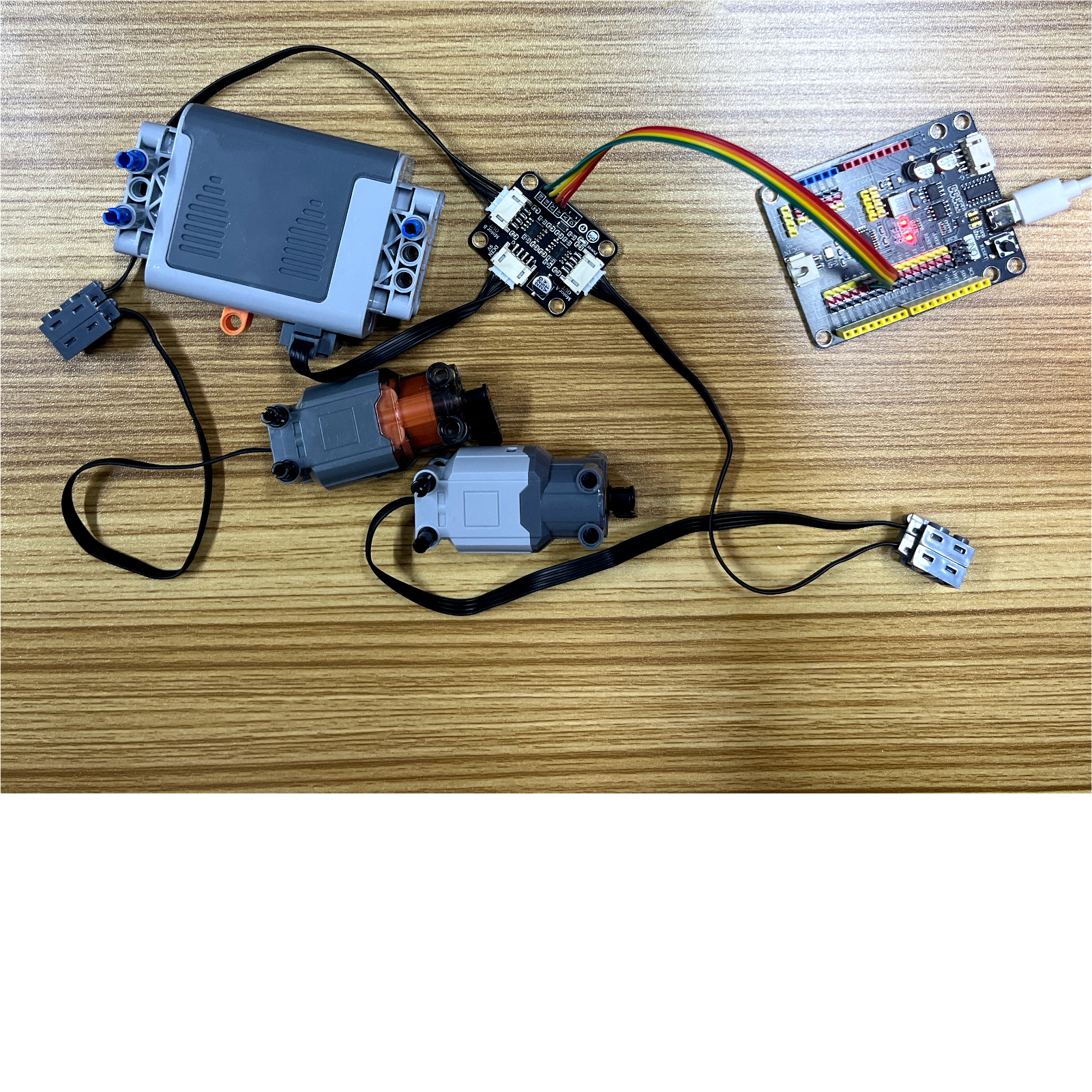
8、测试环境搭建
Arduino UNO 测试环境搭建
准备配件:
HELLO STEM UNO MOC PRO 开发板 *1
USB type-c 数据线 *1
乐高电机*2
乐高电池盒*1
10cm乐高延长线*1
20cm乐高延长线*1
电机驱动模块(HS-F10L-B)*1
2.54针脚4P 双头杜邦线
电路接线图:
ESP32 测试环境搭建
准备配件:待更新...
电路接线图:待更新...
9、视频教程
Arduino UNO视频教程:点击查看
ESP32 Python视频教程:待更新...
10、测试结果
Arduino UNO测试结论:
将器件连接好线之后,上传程序到Arduino UNO 开发板之后,将会发现电机会根据程序先设定转2秒停2秒一直循环。现在您一定已经掌握了直流电机的基本理论和编程。你不仅可以让它前进和后退,还可以调节它的速度。此外,您可以使用所学的知识做更多很棒的应用程序。
ESP32 Python测试结论:
将器件连接好线之后,上传程序到ESP32开发板之后,将会发现电机会根据程序先设定转2秒停2秒一直循环。现在您一定已经掌握了直流电机的基本理论和编程。你不仅可以让它前进和后退,还可以调节它的速度。此外,您可以使用所学的知识做更多很棒的应用程序。