
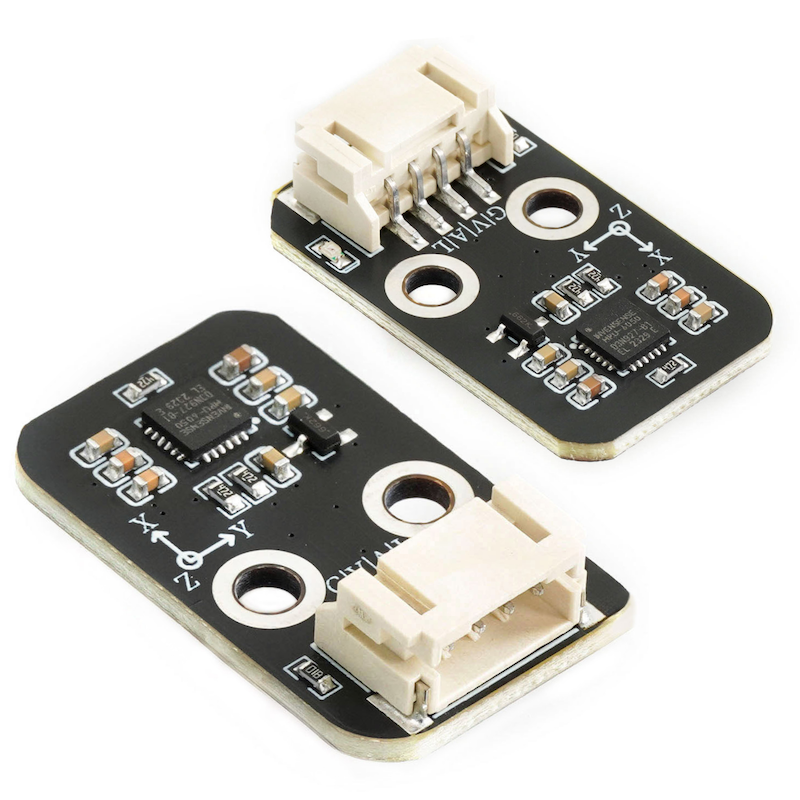
1、소개
2、시뮬레이션 그래프
3、모듈 매개변수
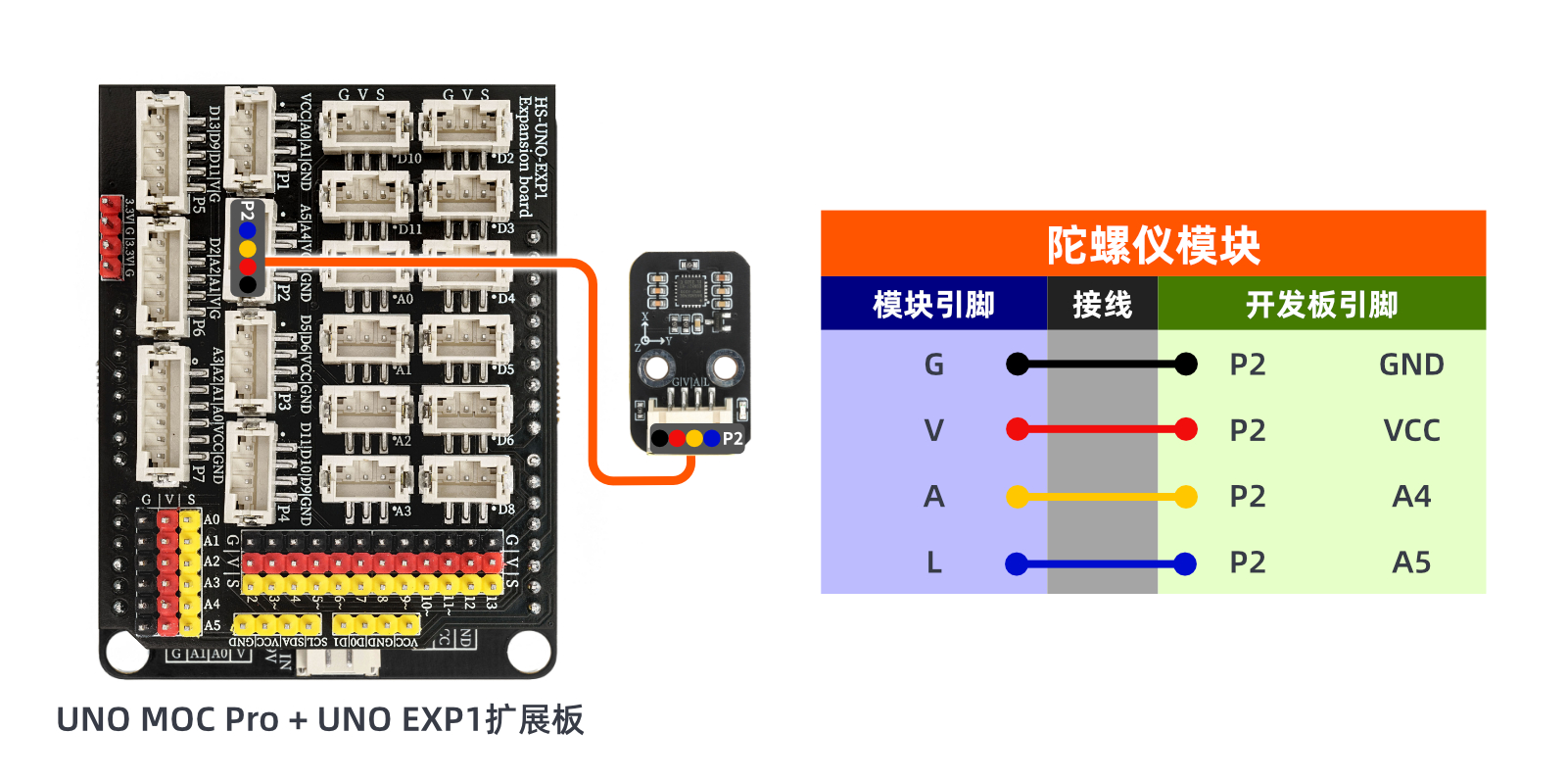
핀 이름 | 설명 |
|---|---|
GND | GND(전원 입력 부정极) |
VCC | VCC(전원 입력 정극) |
SDA | 데이터 전송핀 |
SCL | 통신 클록핀 |
전원 전압: 3.3V - 5V
연결 방식: PH2.0 4P 핀 라인
安装方式:螺丝固定
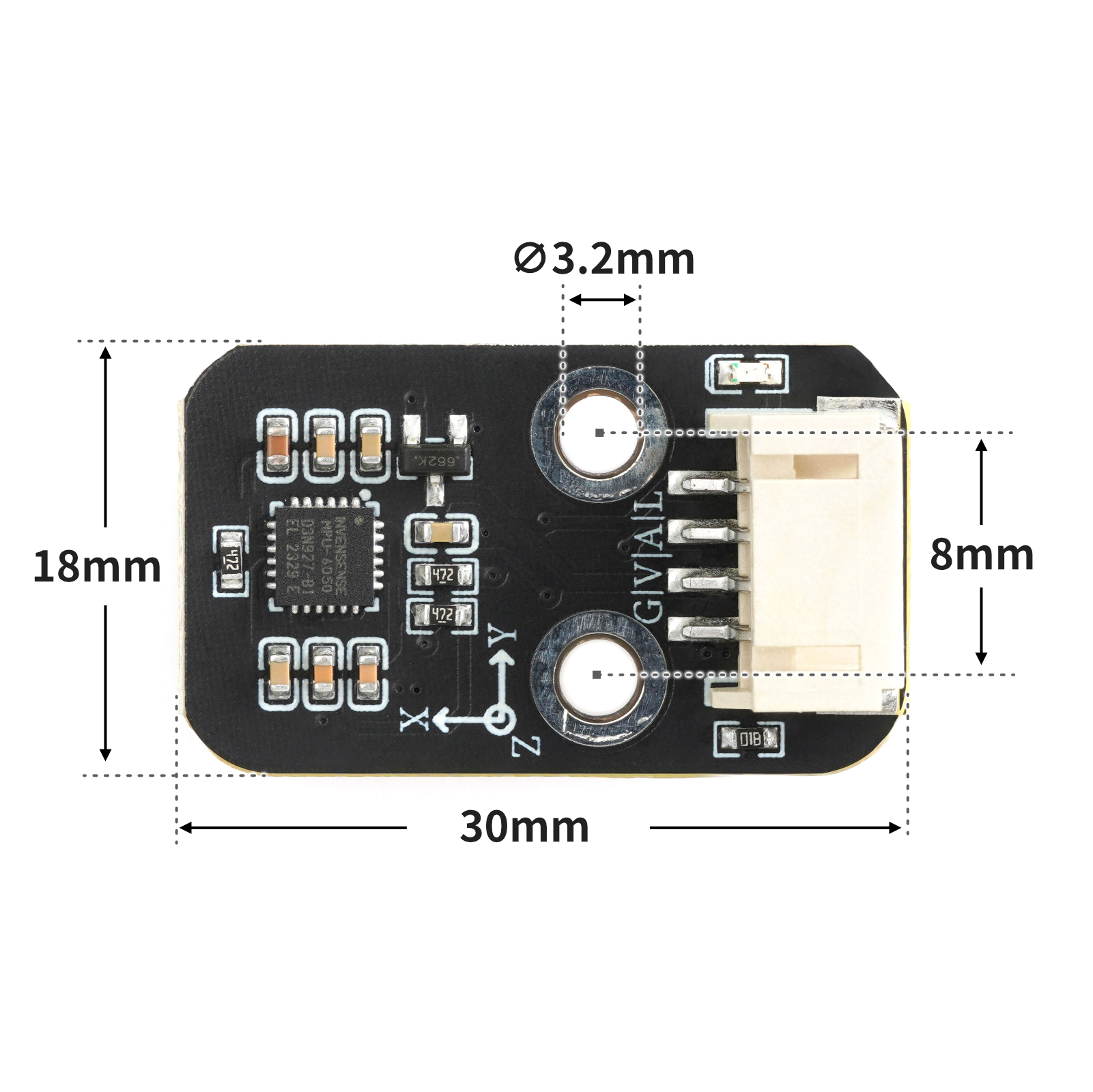
4、회로판 크기
5、아두이노 IDE 예제 프로그램
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
Arduino IDE 라이브러리 다운로드 및 导入 가이드:点击查看
예제 프로그램(UNO 개발 보드):
#include <MPU6050_tockn.h>
#include <Wire.h>
MPU6050 mpu6050(Wire);
void setup(){
Serial.begin(9600);
Wire.begin();
mpu6050.begin();
mpu6050.calcGyroOffsets(true);
}
void loop(){
//读取MPU6050数据\n连接方式:MPU6050连接主控板的IIC接口
mpu6050.update();
Serial.print("\nX轴加速度:");
Serial.print(mpu6050.getAccX());
Serial.print("\tY轴加速度:");
Serial.print(mpu6050.getAccY());
Serial.print("\tZ轴加速度:");
Serial.println(mpu6050.getAccZ());
Serial.print("X轴角度:");
Serial.print(mpu6050.getAngleX());
Serial.print("\tY轴角度:");
Serial.print(mpu6050.getAngleY());
Serial.print("\tZ轴角度:");
Serial.println(mpu6050.getAngleZ());
Serial.print("温度:");
Serial.println(mpu6050.getTemp());
Serial.print("###############################################");
delay(1000);
}6、ESP32 Python 예제(Mixly IDE /미스키에 적용됨)
개발 보드를 선택하세요 Python ESP32 【ESP32 Generic(4MB)】를 코드 모드로 전환하여 업로드하십시오
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미시지(Mixly)IDE ESP32 라이브러리 다운로드 및 가져오기 가이드:点击查看
예제 프로그램(ESP32-Python):
import mpu6050
import machine
import time
# 请勿修改变量
i2c_extend = machine.SoftI2C(scl = machine.Pin(22), sda = machine.Pin(21), freq = 100000)
# 请勿修改变量
# 初始化语句请勿修改里面的变量
accel = mpu6050.accel(i2c_extend)
while True:
# 获传感器数据语句,请勿修改里面的变量。获取的值为字典类型
print(accel.get_values())
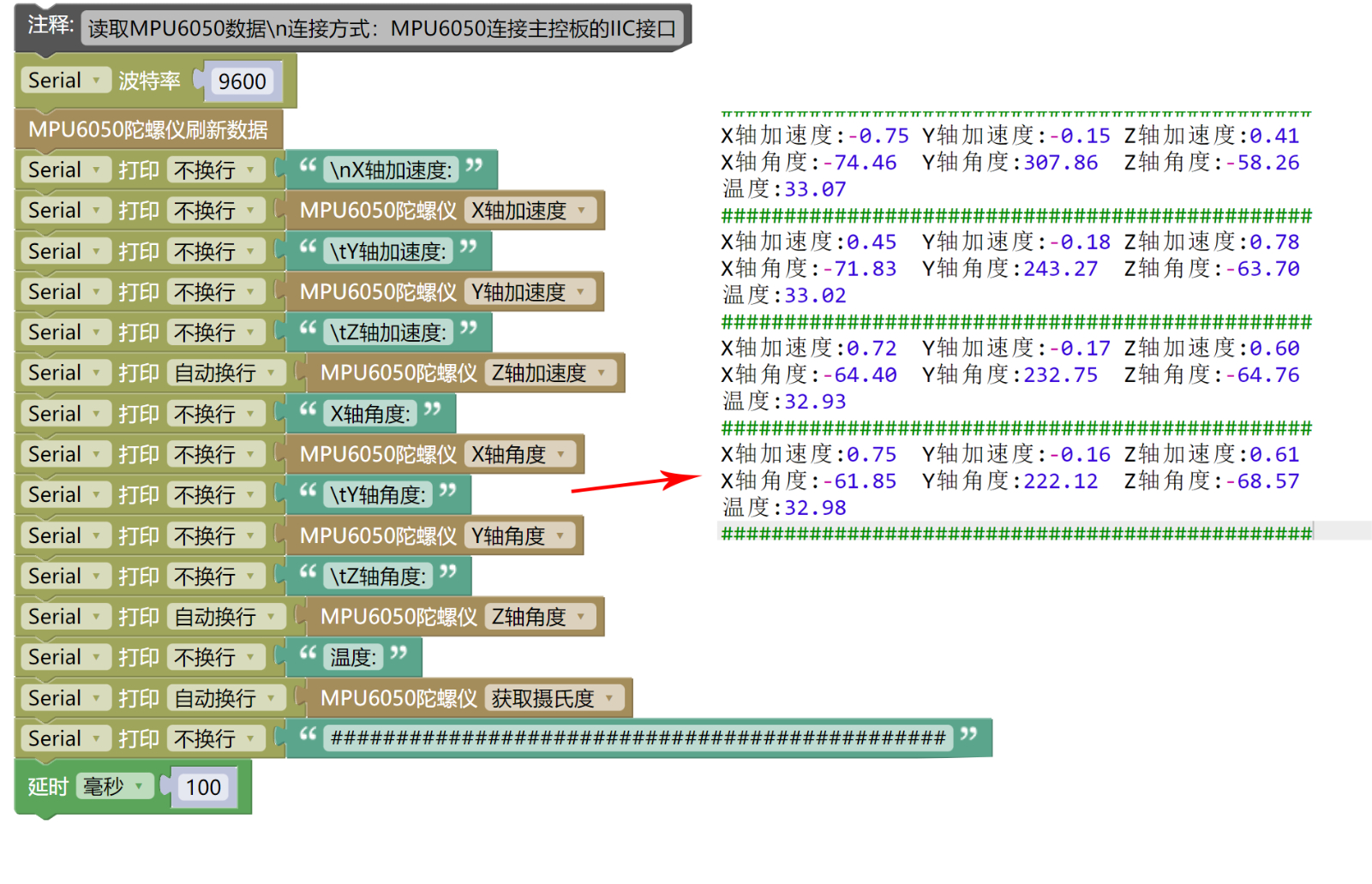
time.sleep_ms(300)7、미스키 Mixly 예제 프로그램(그래픽 언어)
예제 프로그램(UNO 개발 보드):다운로드 클릭
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미스키(Mixly)IDE Arduino 라이브러리 다운로드 및 가져오기 가이드:点击查看
예제 프로그램(ESP32 개발 보드):다운로드 클릭
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미시지(Mixly)IDE ESP32 라이브러리 다운로드 및 가져오기 가이드:点击查看
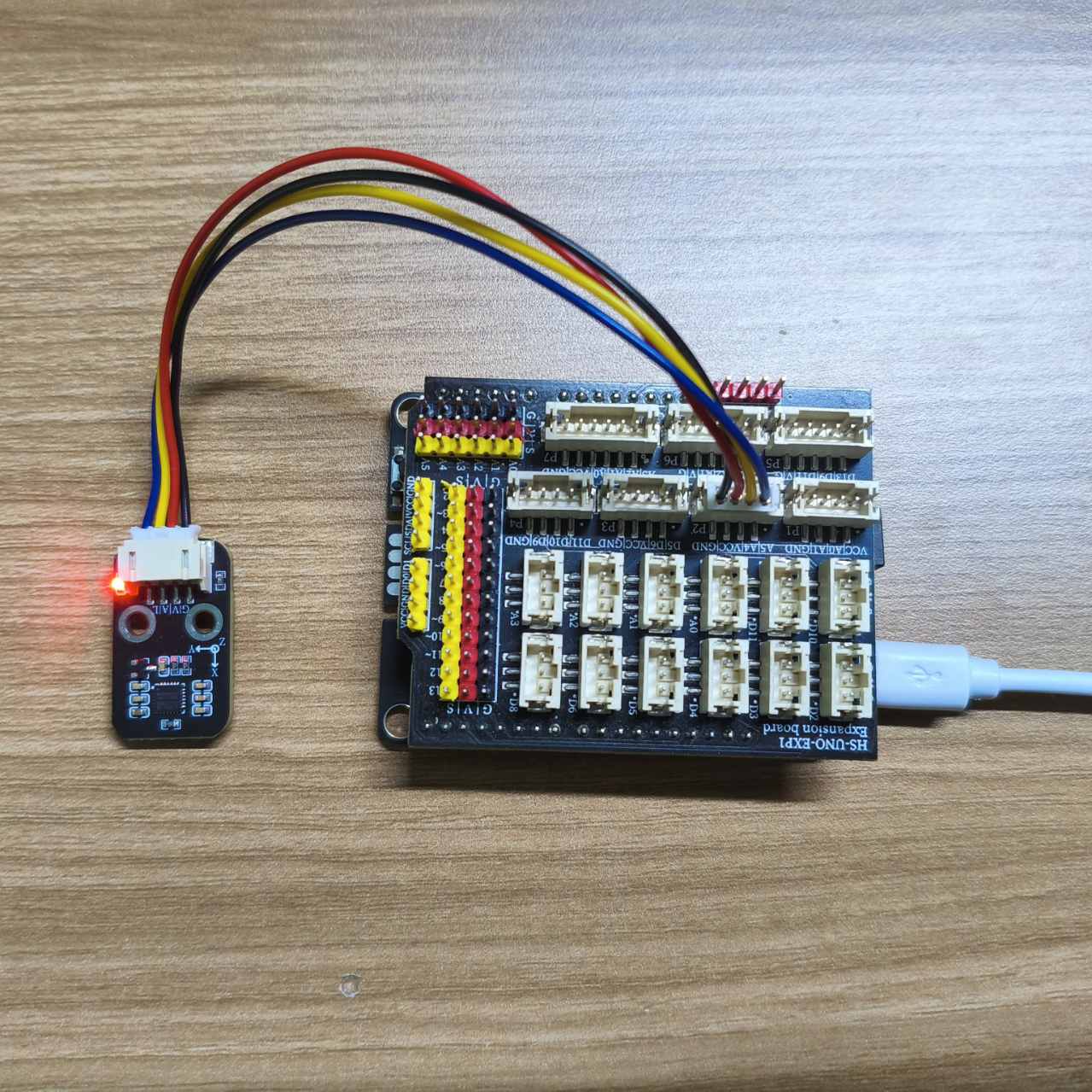
8、테스트 환경 구축
Arduino UNO 테스트 환경 구축
부품 준비:“
HELLO STEM UNO R3 개발 보드 *1
HELLO STEM UNO EXP1 확장보드 *1
USB type-c 데이터 케이블 *1
MPU6050陀螺仪 모듈*1
PH2.0 4P 케이블 *1
전기 연결도):
ESP32 테스트 환경 설정
부품 준비:“
ESP32EA MOC 개발 보드 *1
ESP32-EXP1 확장 보드 *1
USB type-c 데이터 케이블 *1
MPU6050陀螺仪 모듈*1
PH2.0 4P 케이블 *1
전기 연결도): 업데이트 대기 중...
9、비디오 강의
비디오 강의:点击查看
10、테스트 결과
Arduino UNO 테스트 결과:
선이 연결되면, 위의 프로그램을 개발 보드에 업로드한 후, MPU6050 가속도계 모듈 데이터 테스트를 볼 수 있습니다.
ESP32 테스트 결과:
업데이트 대기 중...