
1、소개
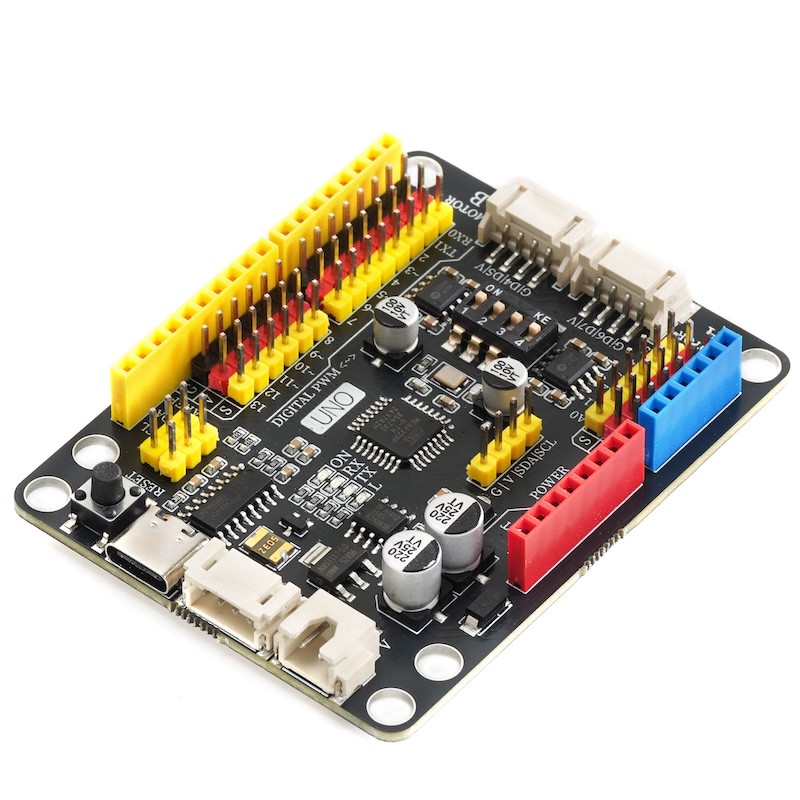
이 아르디놀로 개발 보드는 레고 애호가와 창의자를 위해 설계된 것이며, 레고 프로그래밍 블록과 호환되고, 레고 테크놀로지 블록과 MOC 블록에 쉽게 설치할 수 있습니다.그 이상이 아니라, 레고 배터리로도 지원되어 더 쉽게 창의적인 작업을 할 수 있습니다.
이 개발 보드는 두 개의 모터 드라이버를 내장하고 있으며, 프로그래밍을 통해 정방향 및 역방향 및 속도를 제어할 수 있으며, 출력 전력은 최대 9V/2A에 달하며, LEGO 모터 인터페이스와 호환되어 LEGO 방향 모터를 완벽하게 지원합니다。그럼에도 불구하고, 모터 전원 출력에는 독립 스위치가 있어서 제어하기 편리합니다.
그것은 또한 2.54 밀리미터 간격의 GVS 패널 확장 인터페이스를 갖추고 있으며, 더 많은 센서 장치를 편리하게 확장할 수 있도록 해 주어 프로젝트에 더 많은 기능을 추가할 수 있습니다。
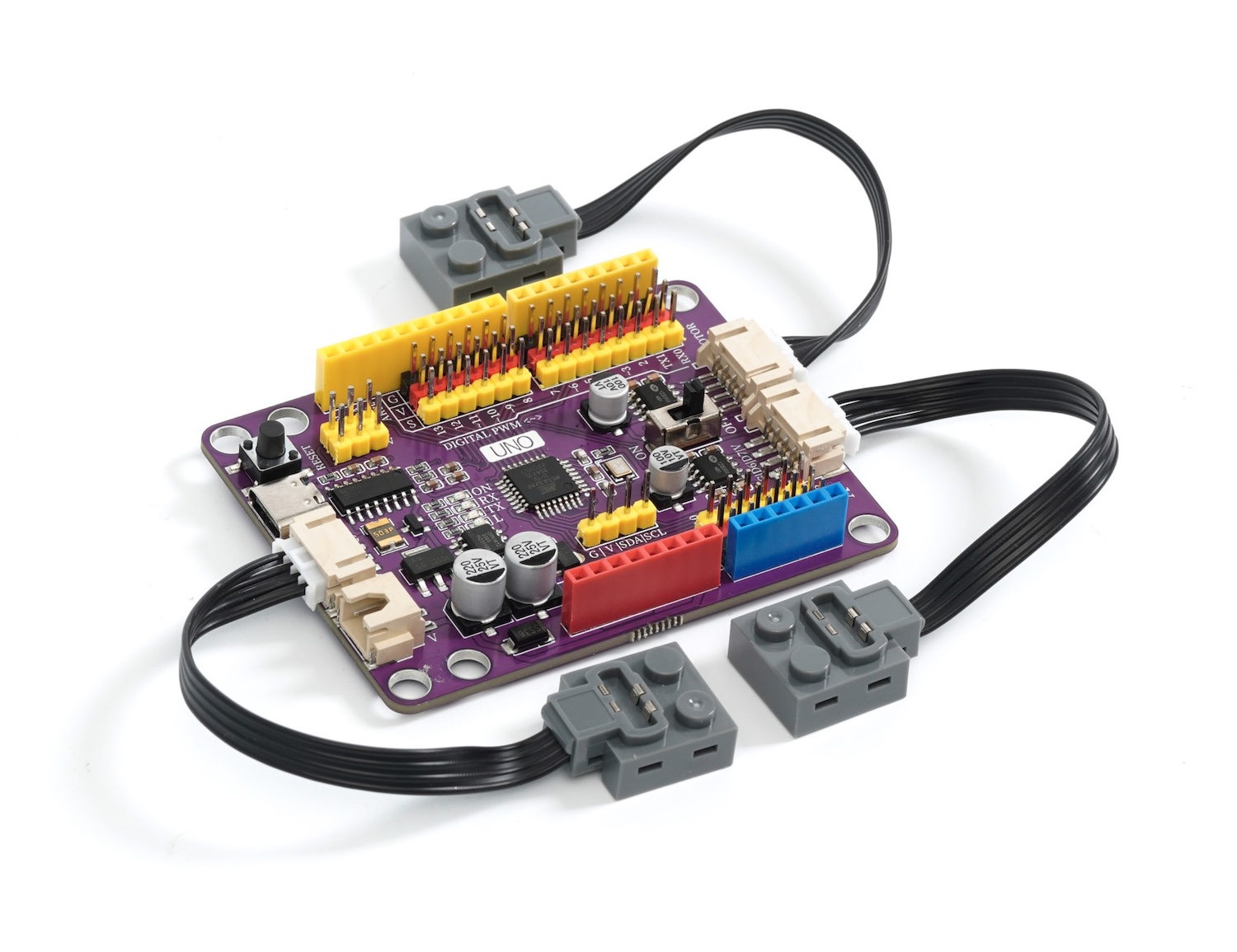
HS-UNO-EXP3 PH MOC 확장판과 함께 사용할 때, PH2.0 콘ector 라인을 사용하여 개발 보드와 센서를 일선으로 연결할 수 있으며, 연결 과정을 간소화할 수 있습니다.
결국, 이 乐고 프로그래밍 블록과 호환되는 Arduino 개발 보드는 당신의 레고 창의성에 더 많은 가능성을 제공합니다.그것이든지 로봇 프로젝트든지, 인공지능 건물이든지, 그리고 다른 창의적인 작품이든지, 그것은 당신의 창의를 실현하는 데 도움이 되는 강력한 도구가 될 것입니다.快来探索乐高世界的无限可能吧!
2、기술 스펙ifik에션
マイココントローラ:ATmega328P
動作電圧:5V
入力電圧(推奨):6-9V
디지털 입력/출력 핀: 14개(그 중 6개 핀이 PWM 핀으로 사용될 수 있습니다)
PWM 핀: 6개
시뮬레이션 입력 핀: 6개
입력/출력 핀 직류 전류:20마이크로암
3.3V 핀 전류:500마이크로암
플래시 메모리(플래시):32KB
SRAM(静态存储器):2KB 한국어
EEPROM:1KB 한국어
내장된 LED핀:13 한국어
다운로드 인터페이스:USB Type-C 한국어
串口控制器:CH340C 한국어
지원하는 프로그래밍 IDE:Arduino IED, Mixly, mblock, Scratch 한국어
3、특징
이는 레고 프로그래밍 블록과 호환되는 아두이노 개발판입니다. 이는 레고 테크 블록과 MOC 블록에 설치할 수 있습니다.
개발판은 레고 배터리 공급을 지원합니다.
개발보드에 내장된 두 가지 마터 드라이버는 프로그래밍을 통해 정방향 및 역방향 및 회전 속도를 제어할 수 있으며, 출력 전력은 9V/2A로, 레고 마터 인터페이스와 호환되며, 레고 방향 전기 모터를 지원합니다. 마터 전원 출력에는 독립적인 스위치 제어가 있습니다.
自带2.54间距의 G V S 排針 확장 인터페이스, 더 많은 센서 장치를 확장하기 편리합니다。
HS-UNO-EXP3 PH MOC 확장 보드와 함께 사용할 수 있는 PH2.0 정류자선을 사용하여 개발 보드와 센서를 일련의 연결로 연결할 수 있습니다。
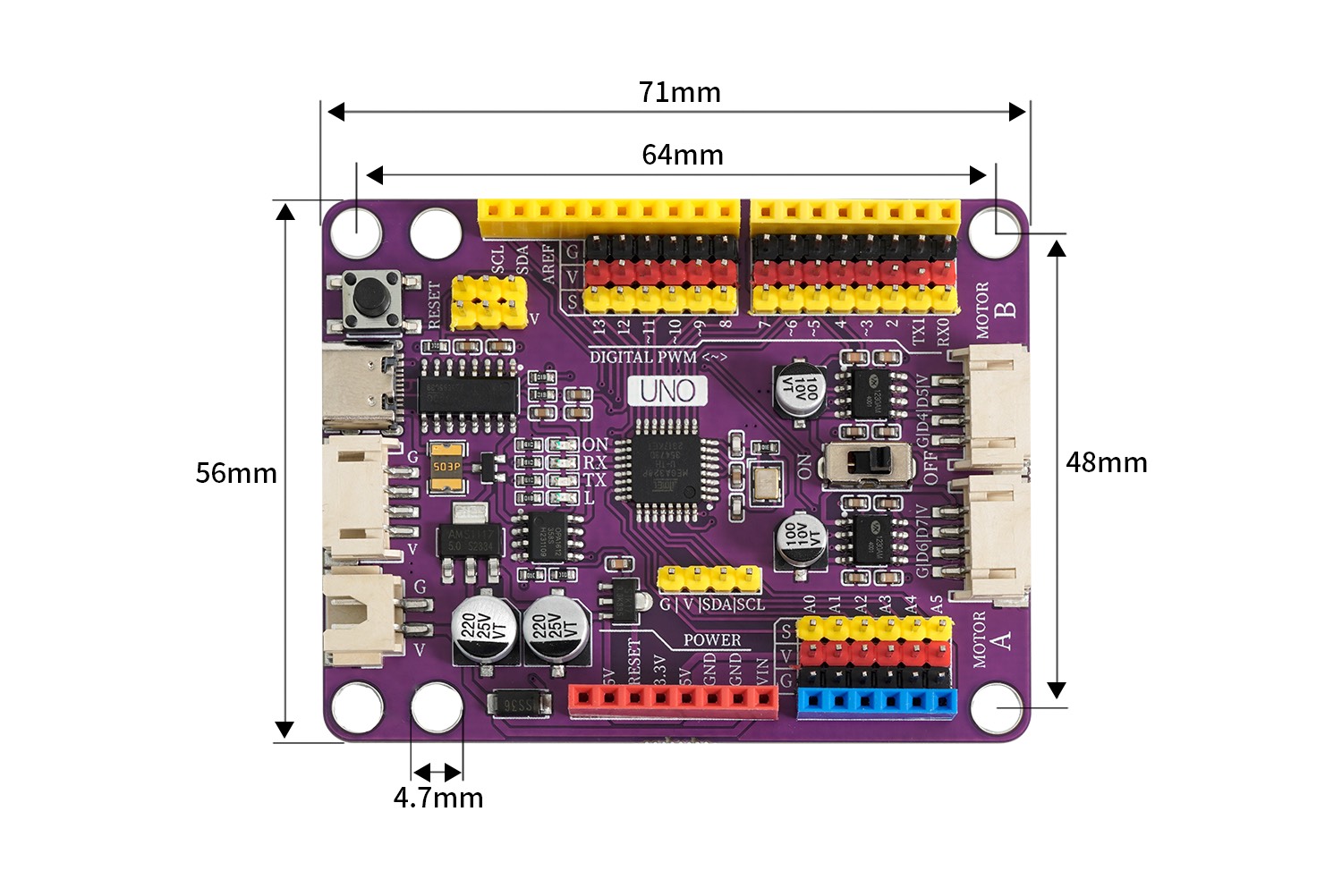
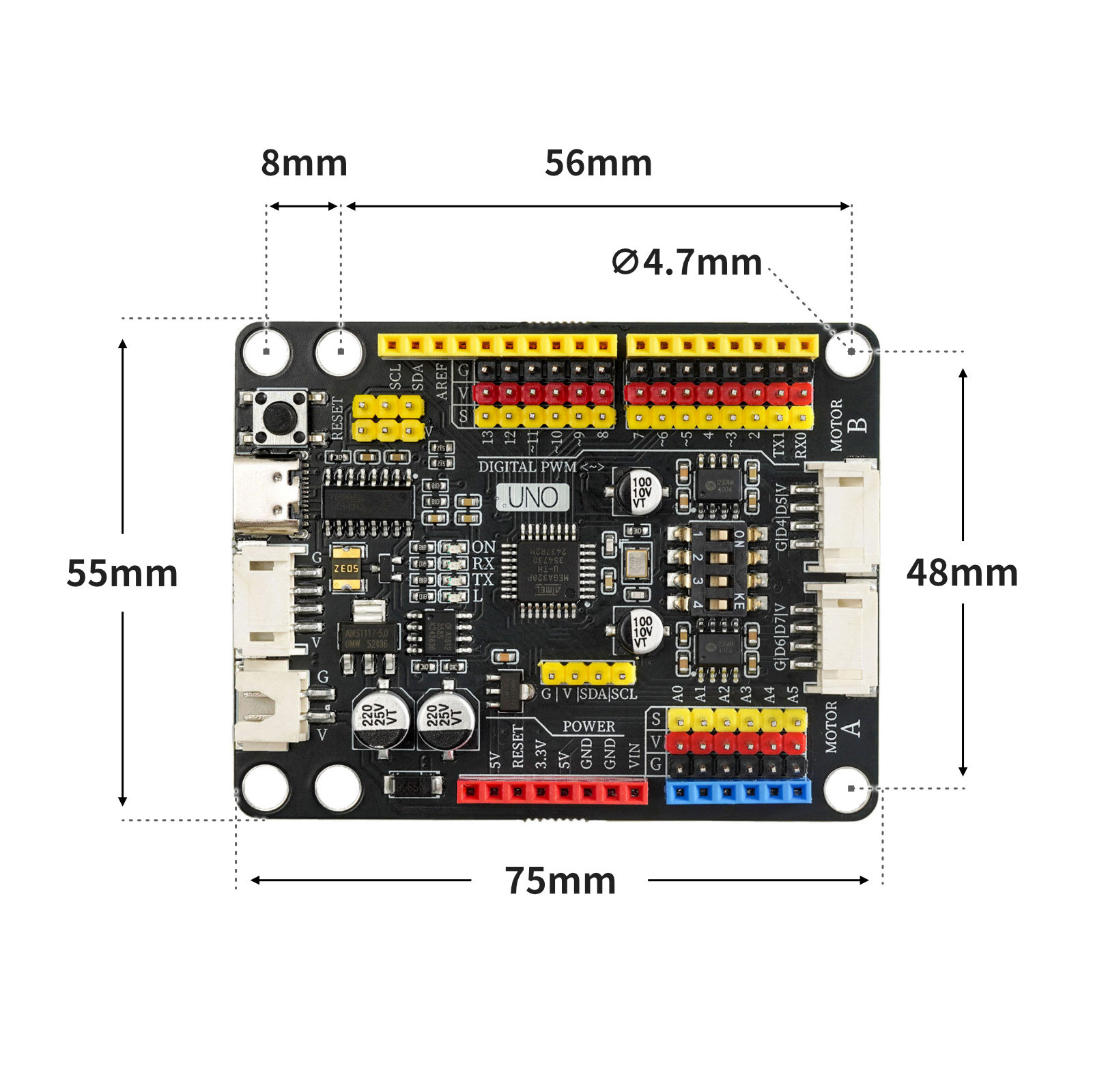
4、회로판 크기
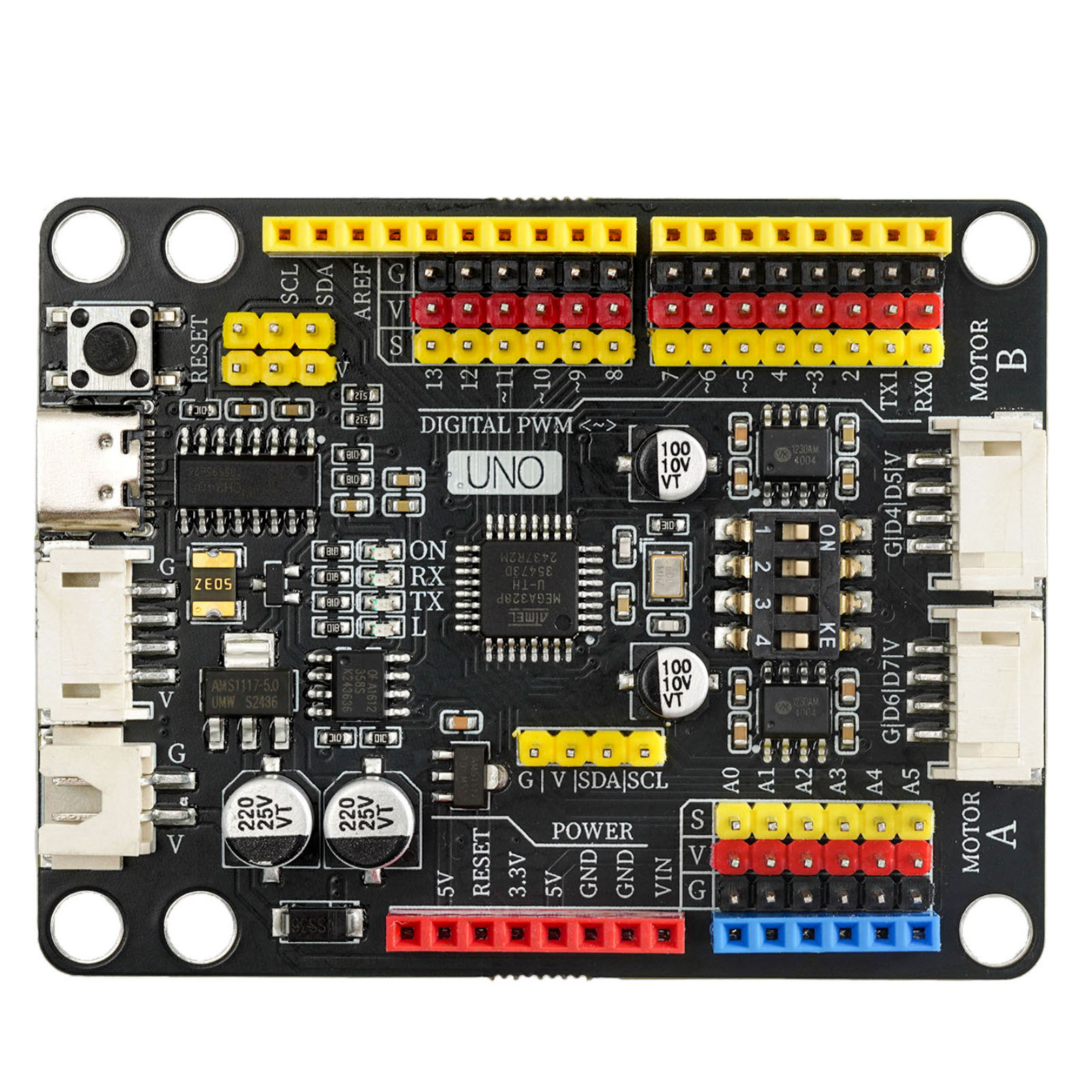
5、개발 보드 해석
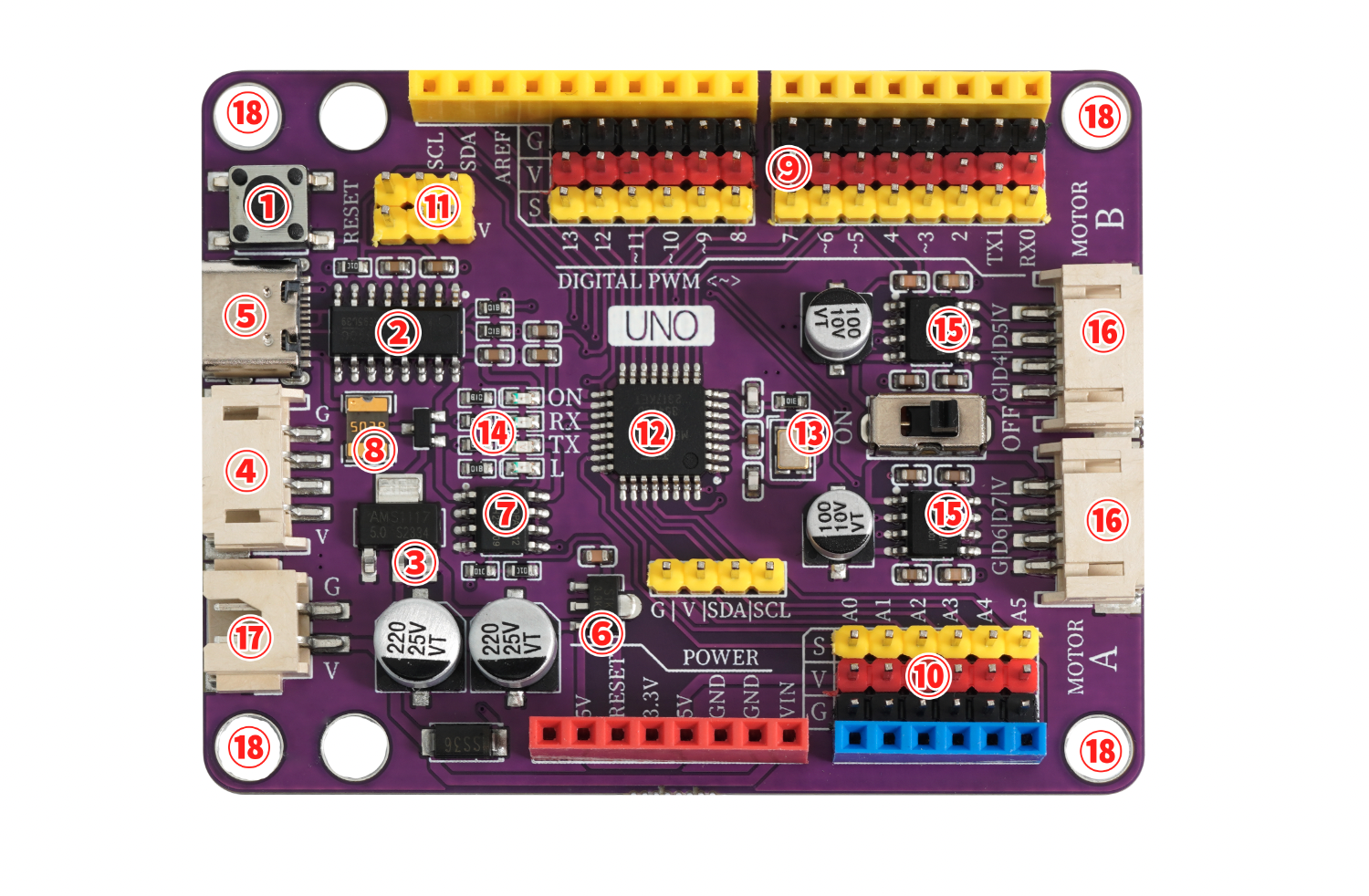
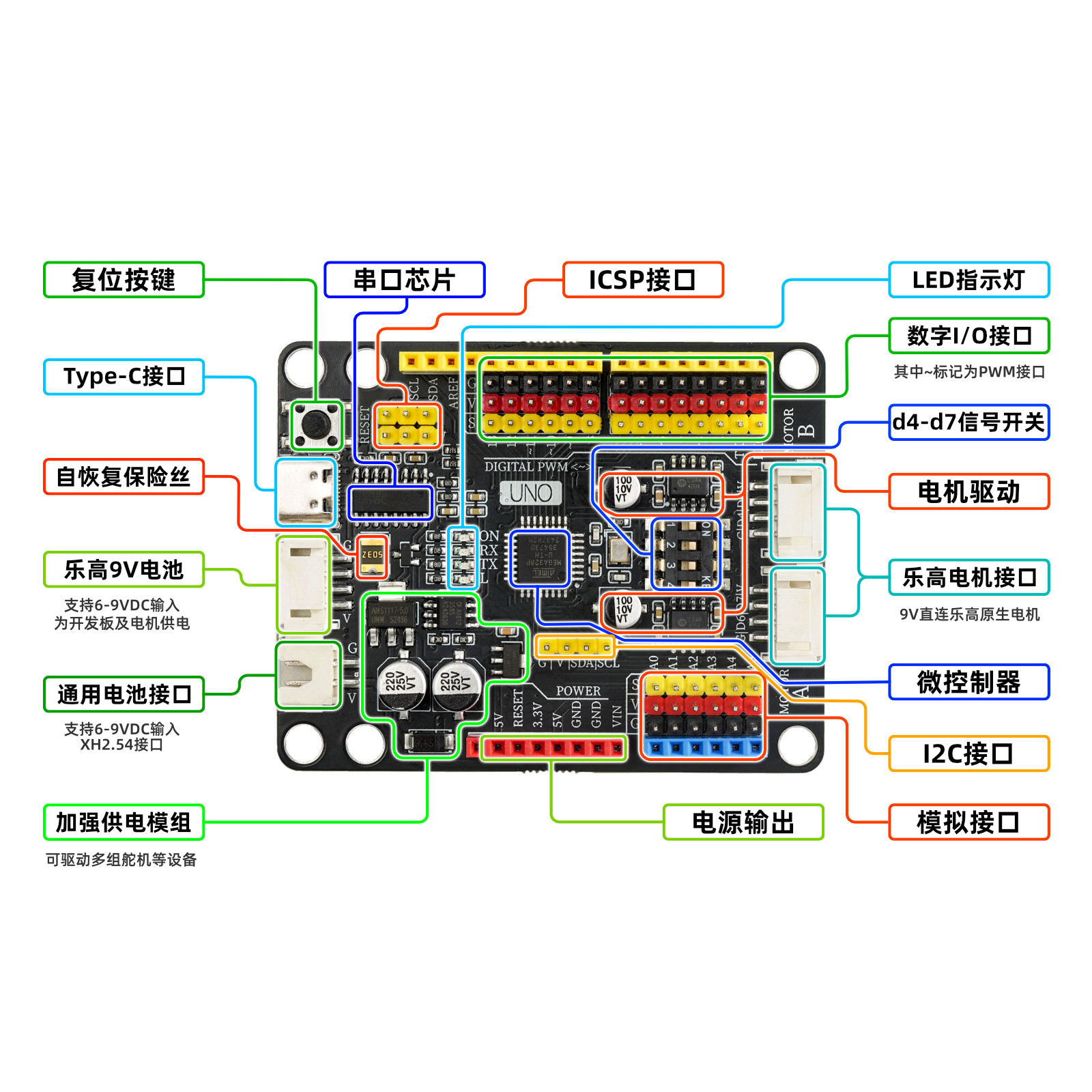
① 리셋 키
复位 버튼을 누르고 프로그램을 다시 실행하세요。②USB串口칩
이 칩은 USB에서 수신된 데이터를 시리얼 데이터로 변환하여 메인 칩에 제공하는 역할을 합니다。③5V/1A 공급 모듈
전원 모듈은 메인보드의 전원 공급을 책임지며, 외부에서 접속된 6-12V 전원을 5V/2A/10W 출력으로 안정화하여 여러 그룹의 서보 모터, 장난감 모터, 미니 슬라이드 등의 장치를 운전할 수 있습니다。④PH2.0 4P 전원 인터페이스(레고 배터리 상자와 호환)
이 인터페이스는 레고 배터리 박스 라인 서리 프로토콜과 호환되며, 제공되는 전원 전선 연결기를 사용하여 레고 배터리 박스와 연결할 수 있습니다.이 인터페이스에서 출력되는 전압은 6-9V입니다. 입력 전압에 따라 결정됩니다.⑤USB 인터페이스
USB Type-C 인터페이스, 데이터 다운로드 및 USB 전원 공급을 담당합니다.⑥3.3V 전원 칩
개발 보드에 3.3V 전압 출력을 제공합니다.⑦外部 공급과 USB 공급 자동 전환 컨트롤러
FDN340P 场效應管+LMV358IDGKR 放大器로 구성된 외부 공급 및 USB 공급 자동 전환 제어 시스템.개발보드는 기본적으로 USB 인터페이스로 전원 공급되며, 외부 전원이 연결되면 컨트롤러가 자동으로 USB 전원을 끊고 외부 전원으로 전환됩니다. 외부 전원이 끊어지면 다시 USB 전원으로 전환되며, 이 기능은 컴퓨터가 개발보드 외부 전원의 전원 방해로부터 보호되도록 합니다.⑧자 복구 보험 단자
개발판이 오류 연결로 인해 단썩이 발생할 때, 보이스터는 자동으로 개발판과 컴퓨터 간의 전기 연결을 끊어 컴퓨터 USB 인터페이스가 불타거나 컴퓨터가 마비되지 않도록 보호합니다。⑨ 숫자 G|V|S 확장 인터페이스
G|V|S 인터페이스를 센서나 액추에이터에 연결할 때 더 편리하고 빠르며, 프로젝트를 구축할 때 확장 보드도 필요 없습니다。G는 GND전원부의 부정극, V는 VCC전원부의 정극, S는 IO신호 인터페이스, G/V는 5V/2A의 출력 전력을 제공하여 대부분의 센서와 기계장치의 전원 공급 요구를 충족합니다。⑩ 모의 G|V|S 확장 인터페이스
보드 내장 모니터링 G|V|S 확장 인터페이스를 통해 모니터링 센서를 연결할 때 더 편리하고 빠르게 할 수 있습니다. 새로운 A6, A7 모니터링 입력 인터페이스를 추가하여 더 많은 센서를 연결할 수 있습니다.⑪ICSP串行数据인터페이스
개발 보드에 초기화 프로그램을 쓰거나 컴파일러를 사용하여 프로그램을 다운로드할 때 이 인터페이스를 연결하세요。⑫ ATMEGA328P메인컨트롤러칩
ATMEGA328P 주컴 칩은 개발 보드의 뇌자라고, 프로그램 저장, 실행, 계산 처리, 신호 입력 출력 기능 등을 담당합니다.⑬크리스탈온
ATMEGA328P 메인 컨트롤러 칩에 시계 신호를 제공합니다。⑭LED지시등
보드에 4개의 LED 신호등이 장착되어 있으며, (ON)은 전원 신호등이며, 전원을 공급하면 바로 밝아집니다. (RX)(TX)는 시리얼 신호 신호등으로, 시리얼 신호가 통신할 때 LED 불이 반짝입니다. (L)는 D13핀 불로, D13 신호가 High일 때, 이 불이 켜집니다.⑮모터, 전동기 드라이브 칩 및 드라이브 스위치
보드에 두 개의 다이나믹 드라이버 칩이 장착되어 있으며, 출력 전력은 9V |2A로, PMW 조속을 지원합니다. 드라이버 칩의 중간에는 스위치가 있어 모터 드라이버가 작동하는지 제어할 수 있습니다.⑯마터, 전동기 인터페이스
마터 인터페이스는 PH2.0 4P 케이블 인터페이스를 사용하며, 인터페이스 라인 순서는 레고 마터 라인 순서와 호환되며, 부속된 전선을 사용하여 직접 레고 마터와 연결할 수 있습니다。⑰XH2.54 전원 인터페이스
이 인터페이스는 주로 리튬이온 배터리 전원을 연결하는 데 사용되며, 입력 전압은 6-9V입니다。⑱레고 블록 설치 구멍
안정공압경질 4.7mm, 레고 블록 부품과 완벽히 호환됩니다。
주의사항
UNO MOC Driver 2.0 개발보드와 UNO MOC Driver 개발보드의 성능은 완전히 동일합니다. 유일한 차이점은 UNO MOC Driver 개발보드의 키패드 스위치가 동시에 2개의 레고 모터 인터페이스 스위치를 제어할 수 있다는 것입니다. 반면에 UNO MOC Driver 2.0 개발보드는 그 중 2개의 레고 모터 인터페이스를 독립적으로 제어할 수도 있으며, 모두를 열거나 닫을 수도 있습니다.
HELLO STEM UNO MOC 드라이버는 재설정 가능한 다중 안전 기능을 갖추고 있으며, 컴퓨터의 USB 포트를 단락 및 과부하로부터 보호합니다。USB 포트에 1A를 초과하는 전류를 가하면, 자동으로 연결이 끊어지고, 단쇄나 과부하가 제거될 때까지 대기합니다.
6、전용 레고 모터, 전동기 인터페이스
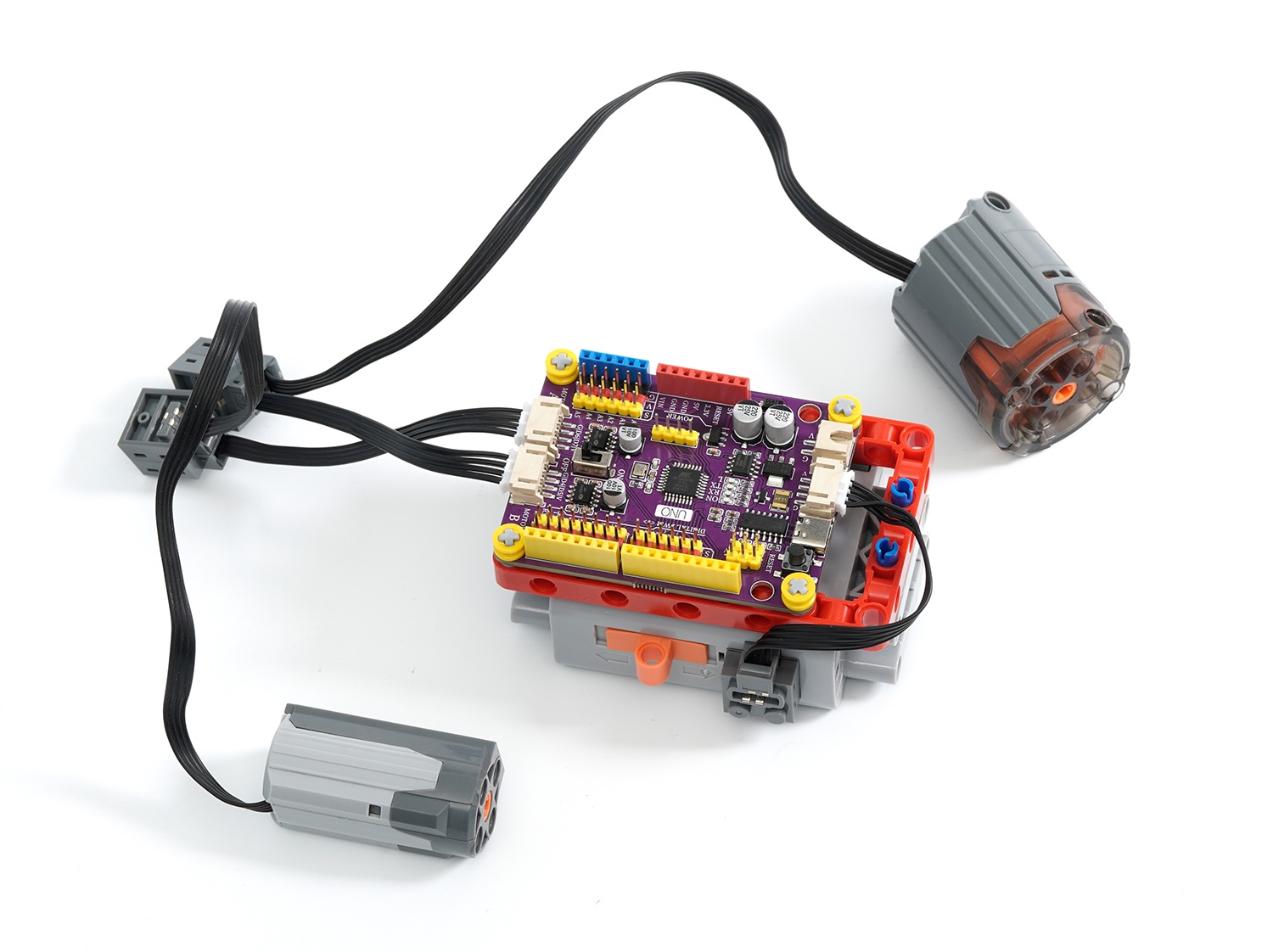
마터 인터페이스는 PH2.0 4P 케이블 인터페이스를 사용하며, 인터페이스 라인 순서는 레고 마터 라인 순서와 호환되며, 부속된 전선을 사용하여 직접 레고 마터와 연결할 수 있습니다。
7、센서 및 확장 부품 인터페이스
보드에 부착된 수치 G|V|S 인터페이스는 센서나 엑서러터와 연결할 때 더 편리하고 빠르며, 프로젝트를 구축할 때 확장 보드도 필요 없습니다。G/V 제공 5V/2.5A의 출력 전력으로 대부분의 센서와 엔진의 전원 공급 요구를 충족합니다.
8、확장 보드 추가
보급형 확장 보드를 설치하면, PH2.0 콘ector 라인을 사용하여 개발 보드와 센서를 일련의 연결로 구현할 수 있으며, 연결 과정을 간소화하여 초보자가 더 쉽게 사용할 수 있습니다。
9、드라이버 다운로드 및 설치
Windows 7, 8, 10, 11 시스템 USB 드라이버 다운로드 및 설치 방법:点击查看
Mac OS 시스템 USB 드라이버 다운로드:CH34X USB串行Mac OS 드라이버 다운로드 및 설치 안내
10、예제 구축 및 예제 프로그램
1、보드 내 모터/马达 드라이버 테스트
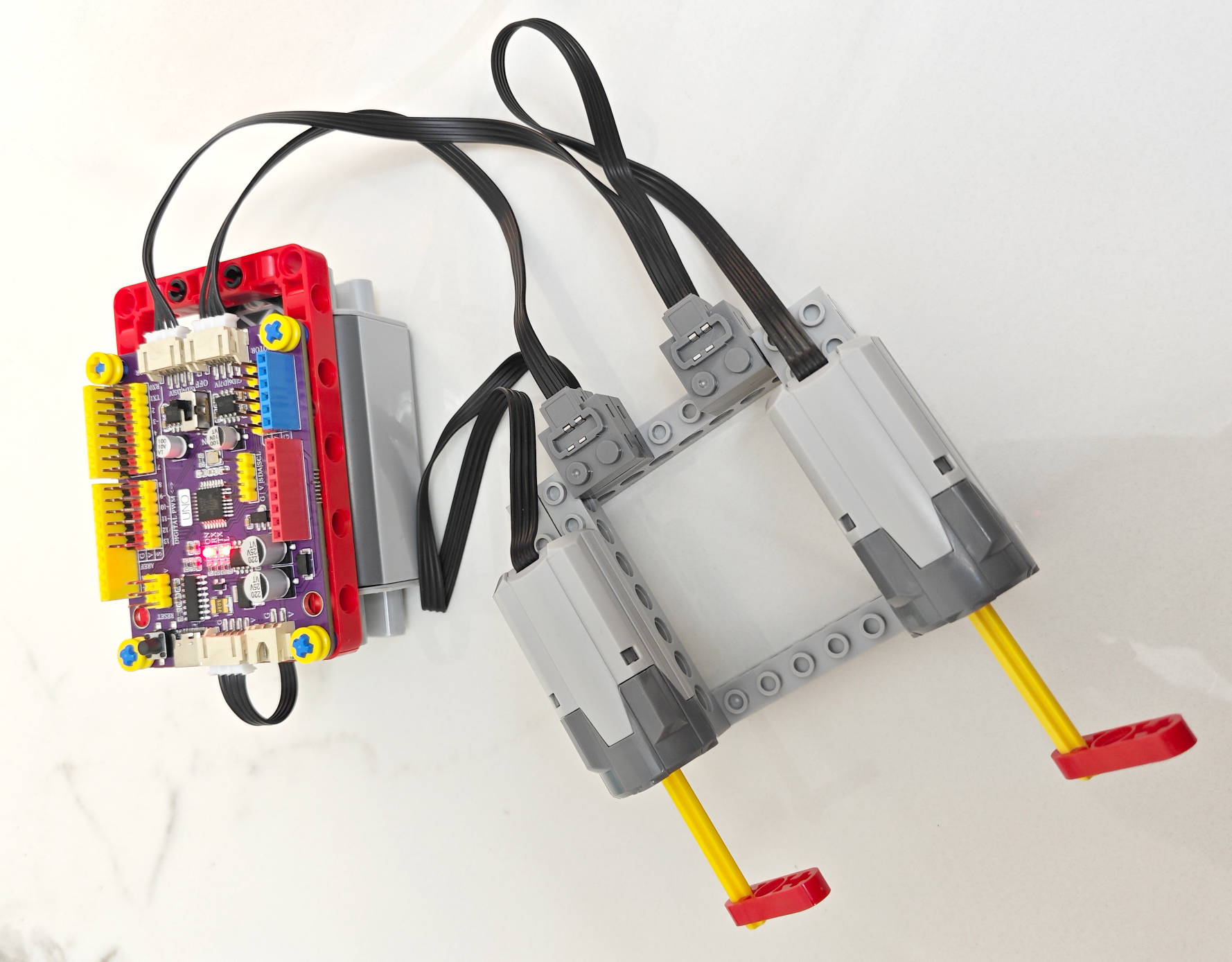
주의: 레고 9686 배터리 박스는 9V를 출력하며, 모터 드라이브 전원은 9686 배터리 박스 입력 단자에 직결되며, 모터 드라이브 전압과 배터리 박스 전압이 일치하므로 출력도 9V입니다. 따라서 보드 탑재 드라이브는 레고와 호환되는 모터/마отор만 연결할 수 있습니다. 호환되지 않는 레고 모터는 전원 공급이 되면 타이어될 수 있습니다.
이 레고 모터의 전력 소비가 크기 때문에, 남후전지를 사용하는 것이 좋습니다. 다른 배터리는 전류가 충분하지 않아 정상적으로 작동하지 않습니다.
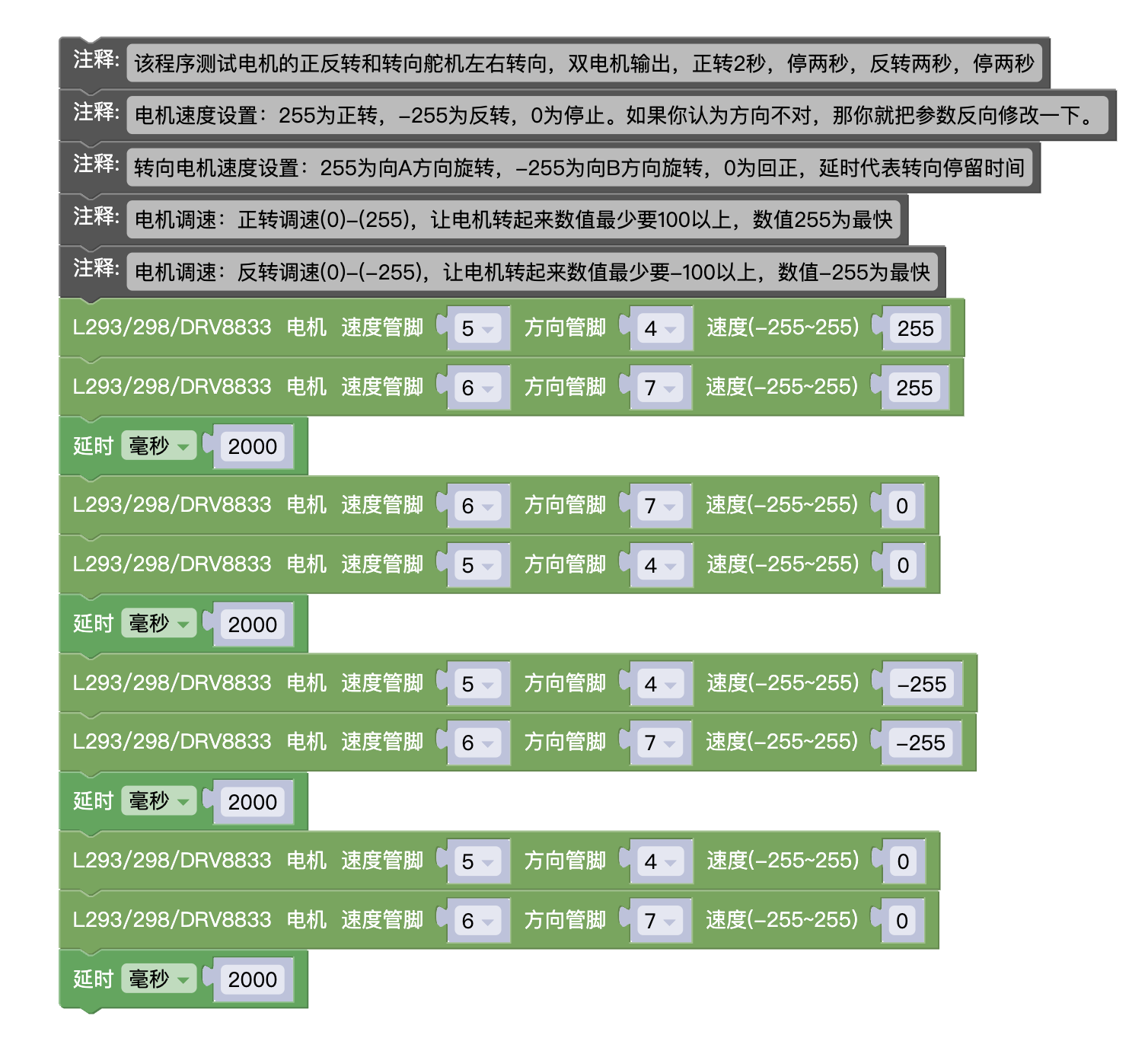
Mixly 미스키 테스트 프로그램 1: 다운로드 클릭
주의: 1、이 프로그램은 방향 전동기와 전동기의 테스트에 적합합니다. 브레이크 프로그램이 추가되지 않았기 때문에, 전동기 테스트 시 전동기의 회전 инер시아가 회전 정확도에 영향을 미칩니다.
2、개발보드가 불안정한 상태가 되는 이유는 대체로 배터리 전원 부족입니다. 속도 값을 작게 설정해 주세요. 예를 들어(200) 또는(-200)
Arduino IDE 테스트 프로그램1(아래 코드를 IDE 편집기에 복사하여 업로드하세요)
주의: 1、이 프로그램은 M 번호의 모터와 방향 모터만 테스트에 적합합니다. 브레이크 프로그램이 추가되지 않았기 때문에, 모터를 테스트할 때 모터의 회전 인ер시아는 회전 정확도에 영향을 미칩니다。
2、개발보드가 불안정한 상태가 되는 이유는 대체로 배터리 전원 부족입니다. 속도 값을 작게 설정해 주세요. 예를 들어(200) 또는(-200)
//该程序测试电机的正反转和转向舵机左右转向,双电机输出,正转2秒,停两秒,反转两秒,停两秒
//电机速度设置:255为正转,-255为反转,0为停止。如果你认为方向不对,那你就把参数反向修改一下。
//转向电机速度设置:255为向A方向旋转,-255为向B方向旋转,0为回正,延时代表转向停留时间
//电机调速:正转调速(0)-(255),让电机转起来数值最少要100以上,数值255为最快
//电机调速:反转调速(0)-(-255),让电机转起来数值最少要-100以上,数值-255为最快
void setMotor8833(int speedpin, int dirpin, int speed) {
if (speed == 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, 0);
} else if (speed > 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, speed);
} else {
digitalWrite(dirpin, HIGH);
analogWrite(speedpin, 255 + speed);
}
}
void setup(){
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
digitalWrite(5, LOW);
digitalWrite(4, LOW);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
}
void loop(){
setMotor8833(5, 4, 255);
setMotor8833(6, 7, 255);
delay(2000);
setMotor8833(6, 7, 0);
setMotor8833(5, 4, 0);
delay(2000);
setMotor8833(5, 4, -255);
setMotor8833(6, 7, -255);
delay(2000);
setMotor8833(5, 4, 0);
setMotor8833(6, 7, 0);
delay(2000);
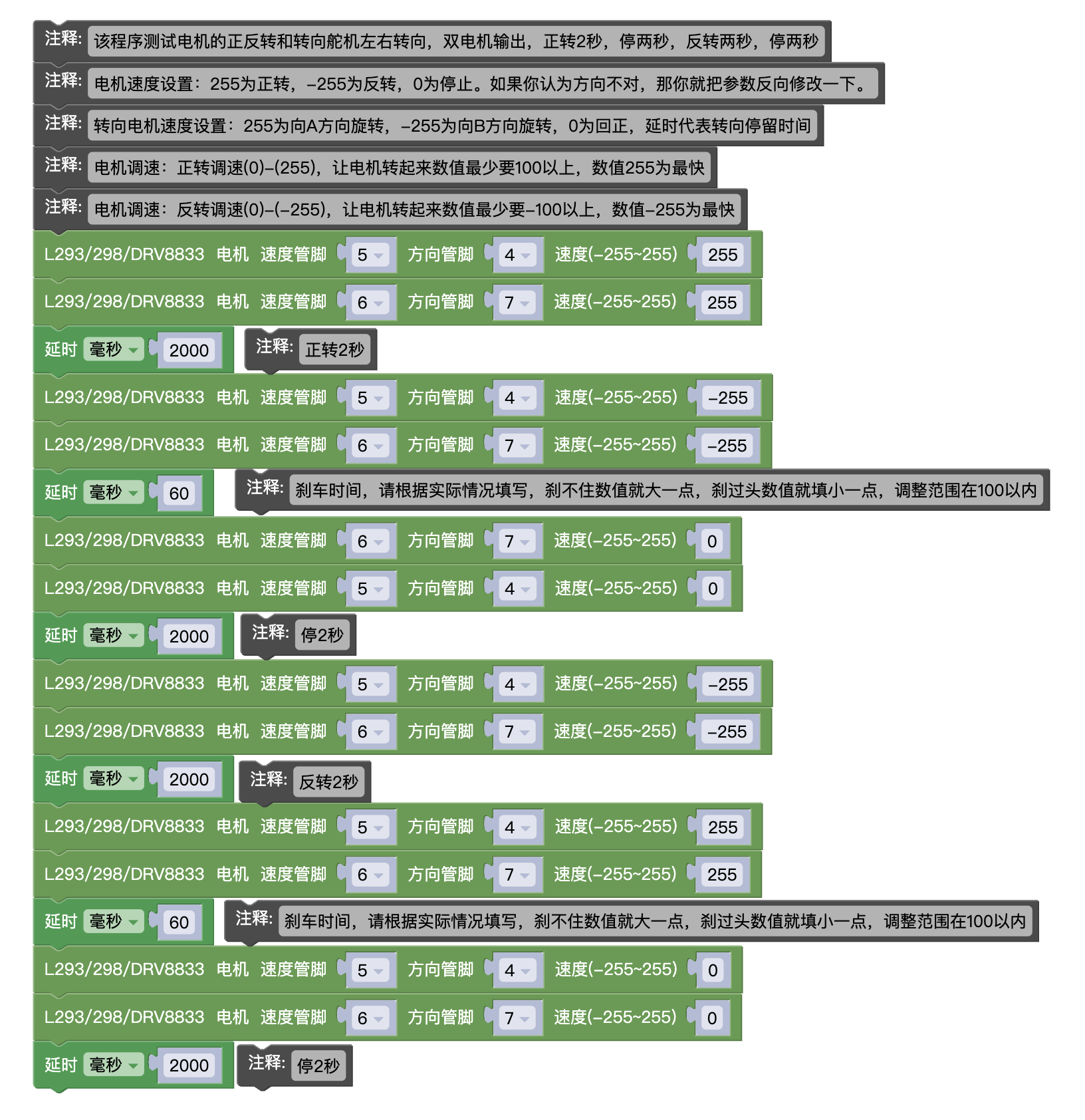
}Mixly 米思齐테스트 프로그램2:다운로드 클릭
주의: 1、이 프로그램은 모터 테스트 전용으로 M, L, XL 모터 테스트에 적용됩니다. 테스트할 때 실제 상황에 따라 브레이크 시간을 조절하십시오
2、개발보드가 불안정한 상태가 되는 이유는 대체로 배터리 전원 부족입니다. 속도 값을 작게 설정해 주세요. 예를 들어(200) 또는(-200)
Arduino IDE 테스트 프로그램2(아래 코드를 IDE 편집기에 복사하여 업로드하세요)
주의: 1、이 프로그램은 전기 모터 테스트에 전용되어 있으며, M, L, XL 모터 테스트에 적용됩니다. 테스트 시 실제 상황에 따라 브레이크 시간을 조절해 주세요
2、개발보드가 불안정한 상태가 되는 이유는 대체로 배터리 전원 부족입니다. 속도 값을 작게 설정해 주세요. 예를 들어(200) 또는(-200)
void setMotor8833(int speedpin, int dirpin, int speed) {
if (speed == 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, 0);
} else if (speed > 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, speed);
} else {
digitalWrite(dirpin, HIGH);
analogWrite(speedpin, 255 + speed);
}
}
void setup(){
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
digitalWrite(5, LOW);
digitalWrite(4, LOW);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
}
void loop(){
setMotor8833(5, 4, 255);
setMotor8833(6, 7, 255);
delay(2000);
setMotor8833(5, 4, -255);
setMotor8833(6, 7, -255);
delay(60); //刹车时间
setMotor8833(6, 7, 0);
setMotor8833(5, 4, 0);
delay(2000);
setMotor8833(5, 4, -255);
setMotor8833(6, 7, -255);
delay(2000);
setMotor8833(5, 4, 255);
setMotor8833(6, 7, 255);
delay(60); //刹车时间
setMotor8833(5, 4, 0);
setMotor8833(6, 7, 0);
delay(2000);
}