
1、介紹
這款Arduino開發板是專為樂高愛好者和創意者設計的,它与樂高編程積木兼容,可以輕鬆安裝在樂高科學積木和MOC積木上。不僅如此,它還支持樂高電池供電,讓你的創作更加便攜。
該開發板板載兩路馬達驅動,通過編程可以控制正反轉和轉速,輸出功率高達 9V/2A,並且輸出接口兼容樂高馬達接口,能夠完美支持樂高轉向電機。此外,馬達電源輸出還設有獨立開關,方便你進行控制。
它還自帶 2.54 間距的 GVS 排釘擴展接口,使你能够方便地擴展更多感應器設備,為你的項目增添更多功能。
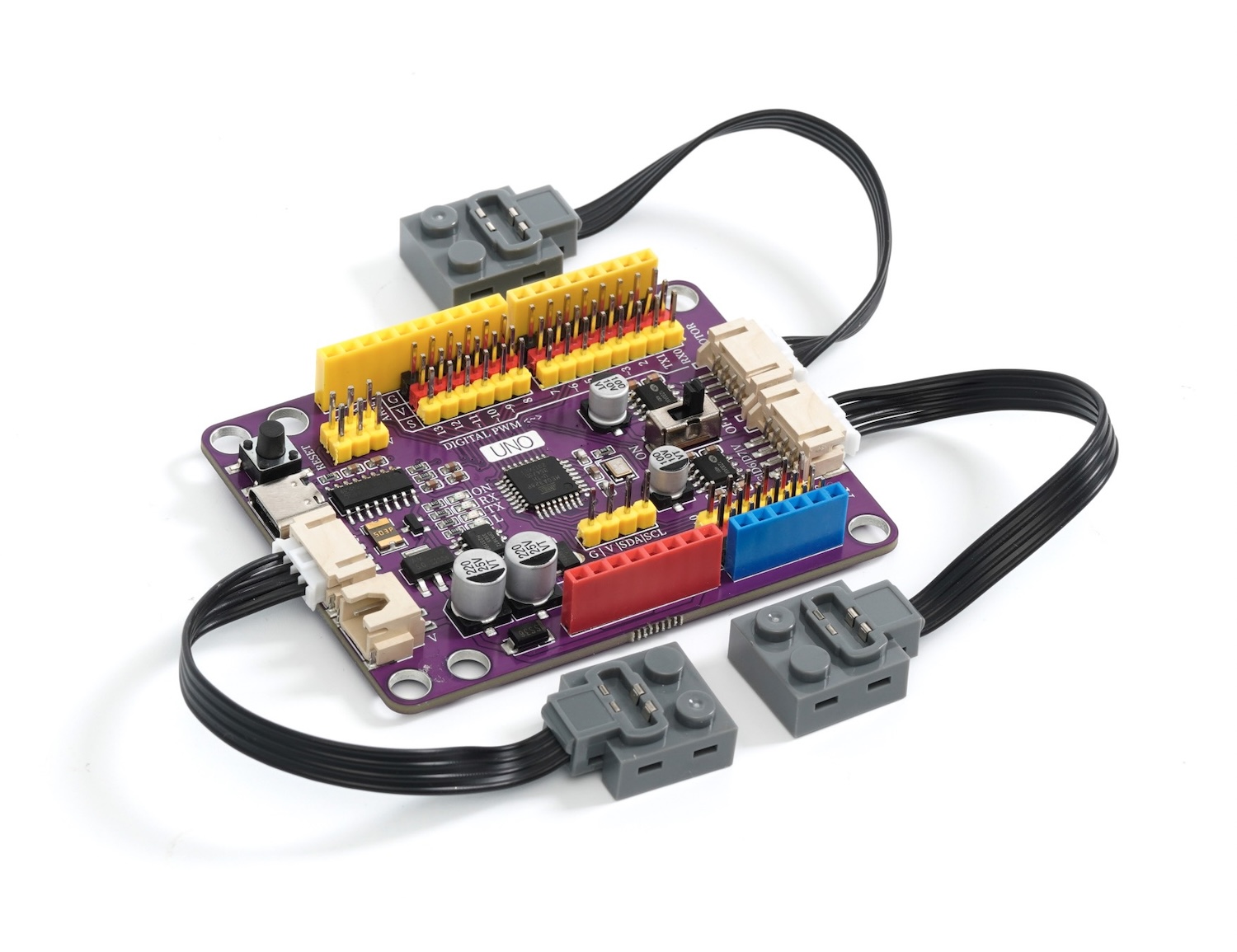
而與 HS-UNO-EXP3 PH MOC 扩展板搭配使用時,你可以利用 PH2.0 端子線,實現一線連接開發板與感測器,簡化接線過程。
總之,這款兼容樂高編程積木的 Arduino 開發板為你的樂高創作提供了更多可能性,讓你的想像力得以充份發揮。無論是機器人專案、智能建築還是其他創意作品,它都將成為你實現創意的得力工具。快來探索樂高世界的無限可能吧!
2、技術規格
微控制器:ATmega328P
工作電壓:5V
輸入電壓(推薦):6-9V
數字輸入輸出引腳:14個(其中有6個引腳可作為PWM引腳)
PWM引腳:6個
模擬輸入引腳:6個
輸入/輸出引腳直流電流:20毫安
3.3V引腳電流:500毫安
Flash Memory(閃存):32KB
SRAM(靜態存儲器):2KB
EEPROM:1KB
內置LED引腳:13
下載接口:USB Type-C
串口控制器:CH340C
支援的編程IDE:Arduino IED,Mixly,mblock, Scratch
3、特徵
這是一款兼容樂高編程積木的Arduino開發板,支持安裝在樂高科技術積木上,MOC積木上。
開發板支持樂高電池供電
開發板板載兩路馬達驅動,可通過編程控制正轉和反轉及轉速,輸出功率為 9V/2A ,輸出接口兼容樂高馬達接口,支援樂高轉向電機,馬達電源輸出有獨立開關控制。
自帶2.54間距的 G V S 排針擴展接口,方便擴展更多感測器設備。
搭配 HS-UNO-EXP3 PH MOC 扩展板,可使用PH2.0端子線,一線連接開發板與感應器。
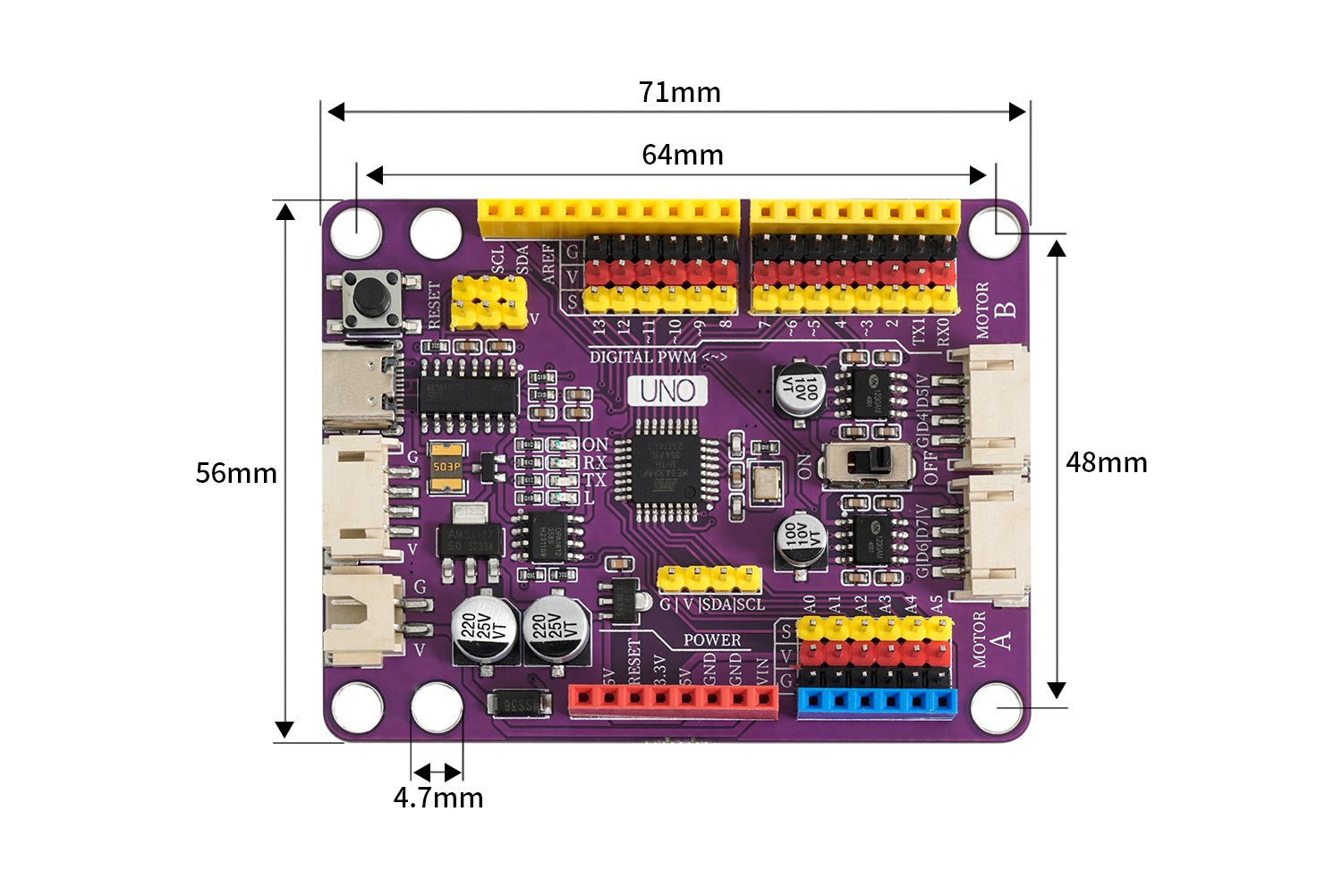
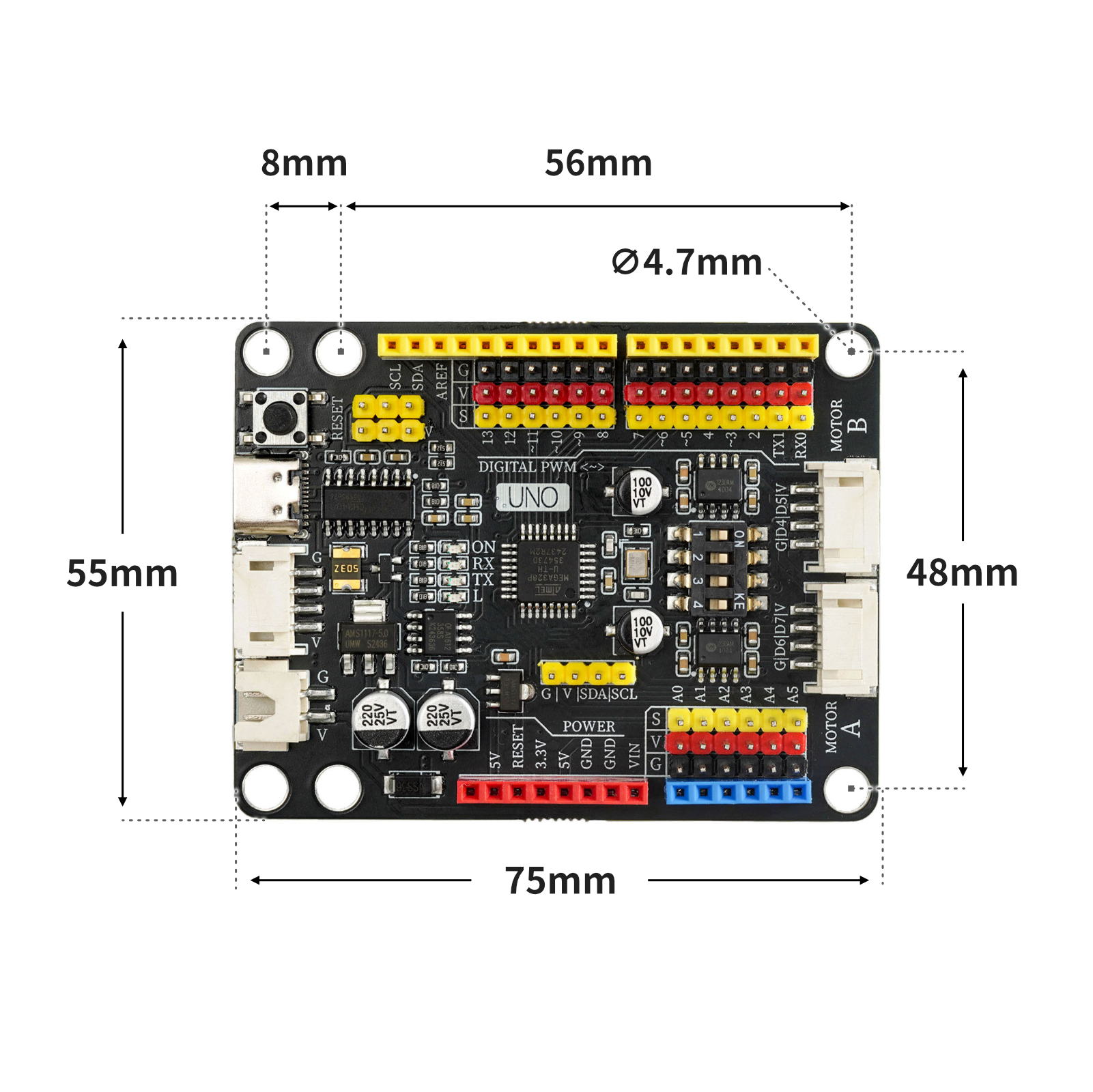
4、電路板尺寸
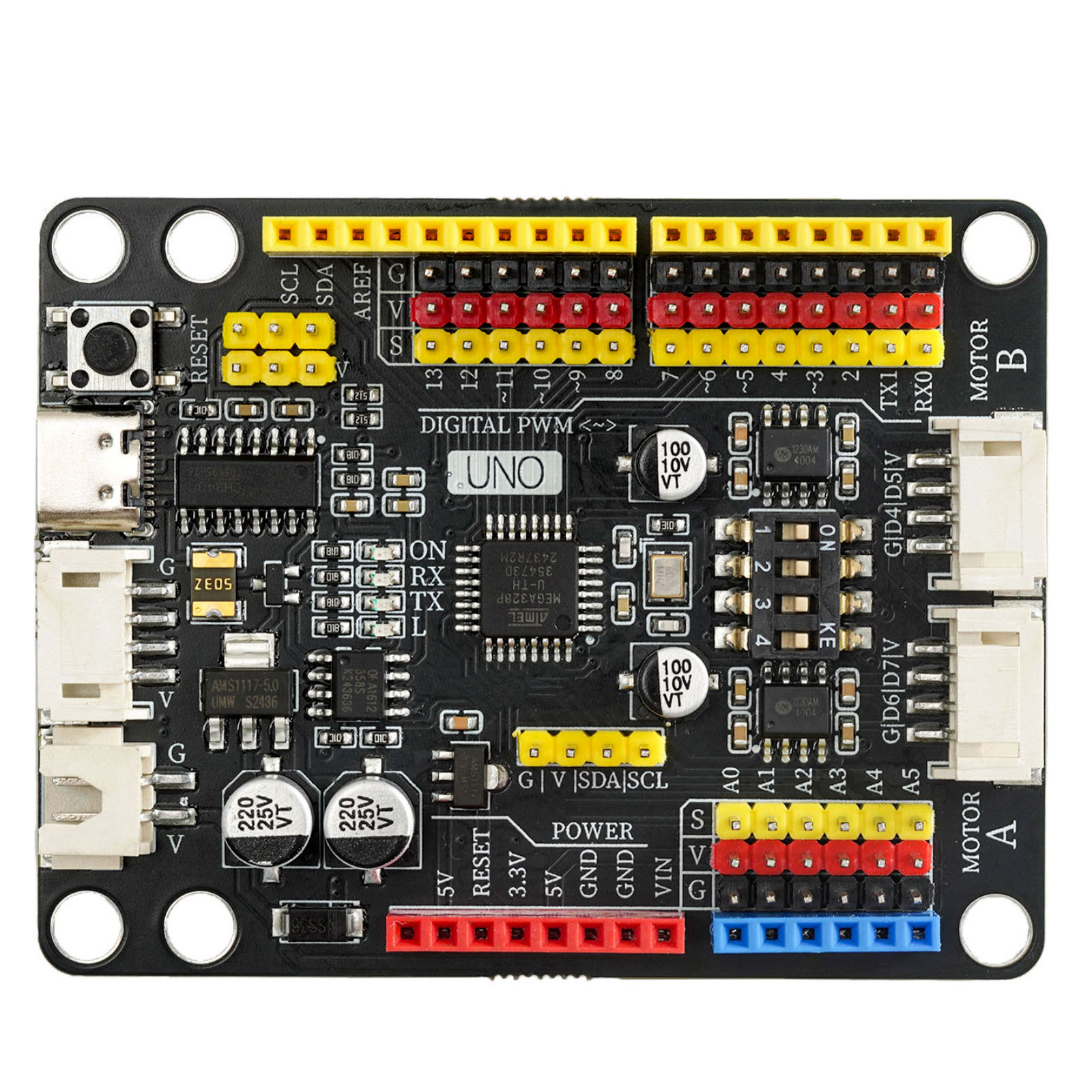
5、開發板解析
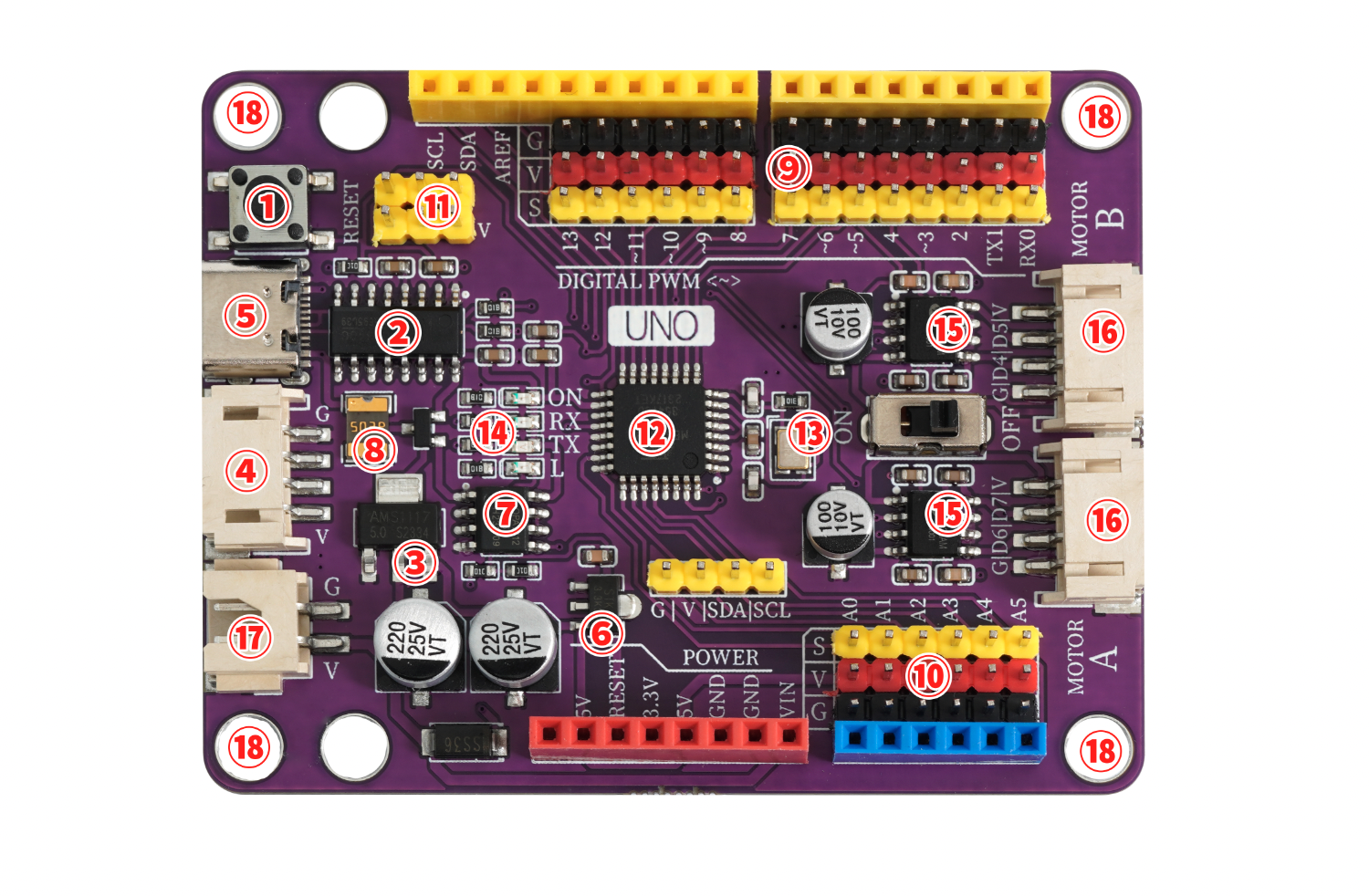
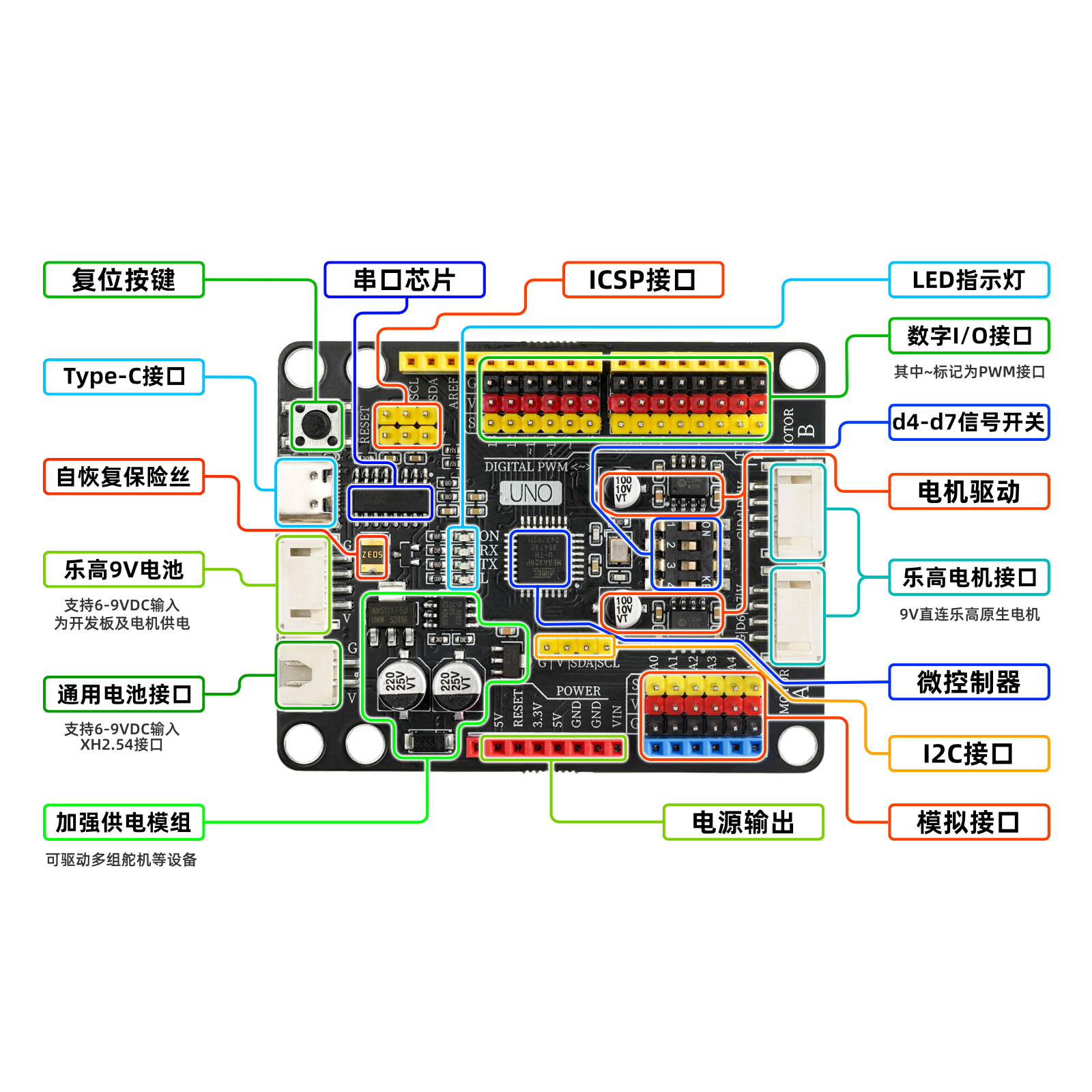
①重置按鈕
按下重置按鈕,重新執行程序。②USB串行芯片
該芯片負責將USB接收到的資料轉換為串行資料給主控芯片。③5V/1A電源模組
供電模組負責主板的供電服務,外部接入的6-12V電源穩壓至 5V/2A/10W輸出,可驅動多組舵機,玩具馬達、微型滑台等設備。④PH2.0 4P電源接口(相容樂高電池盒)
該介面兼容樂高電池盒線序協議,使用配套的電源轉接线即可與樂高電池盒進行連接。該介面輸出的電壓為6-9V,根據你的輸入電壓決定。⑤USB接口
USB Type-C接口,負責數據下載及USB供電。⑥3.3V電源晶片
為開發板提供3.3V電壓輸出。⑦外部供電與USB供電自動切換控制器
FDN340P場效應管+LMV358IDGKR放大器組成的外部供電與USB供電自動切換控制系統。開發板默認由USB接口供電,當外部電源接入後控制器會自動斷開USB供電並切換至外部電源供電,外部電源斷開後再自動切換為USB供電,該功能可保護電腦不受開發板外部供電的電源干擾。⑧自恢復保險絲
當開發板發生錯誤連接導致短路時,保險絲會自動斷開開發板與電腦之間的電路連接,從而保護電腦USB接口不被告燒毀或電腦死機。⑨ 數字 G|V|S 扩展介面
板載數字 G|V|S 接口連接感應器或執行者時更加的好方便快捷,搭建項目時也不再需要擴展板。G為GND電源負極,V為VCC電源正極,S為IO信號接口,G/V提供5V/2A的輸出功率,滿足大部分感應器和執行器的供電需求。⑩ 模擬 G|V|S 扩展介面
板載模擬 G|V|S 扩展介面連接模擬感測器時更加方便快捷,新增 A6、A7 模擬輸入介面,可接入更多感測器。⑪ICSP串行資料介面
為開發板寫入初始化程序或使用編譯器下載程序時連接此介面。⑫ ATMEGA328P主控晶片
ATMEGA328P主控晶片是開發板的大腦,負責程式儲存、執行、運算處理、信號輸入輸出等功能。⑬晶振
為ATMEGA328P主控晶片提供時鐘信號。⑭LED指示燈
板載4個LED指示燈,(ON)為電源指示燈,通電即亮,(RX)(TX)為串口信號指示燈,當有串口信號通訊時LED燈閃爍,(L)為D13腳位燈,當D13信號為High時,該燈點亮。⑮馬達、電機驅動芯片及驅動開關
板載兩顆達驅動芯片,輸出功率9V |2A, 支持PMW調速 ,驅動芯片的中間設有一個撥動開關,來控制馬達驅動是否工作。⑯馬達、電機接口
馬達接口採用PH2.0 4P端子接口,接口線序兼容樂高馬達線序,使用附帶的轉接线可直接與樂高馬達連接。⑰XH2.54電源接口
該接口主要用於連接鋰電池供電,輸入電壓為6-9V。⑱樂高積木安裝孔
安裝孔直徑4.7mm,與樂高積木件完全兼容。
须知
UNO MOC Driver 2.0開發板 和 UNO MOC Driver 開發板 性能完全没有區別,唯一區別在於UNO MOC Driver 開發板 的拔動開關只能同時控制2個樂高電機接口的開關,而UNO MOC Driver 2.0開發板可以獨立控制其中的2個樂高電機接口,也可以全部打開或者關閉。
HELLO STEM UNO MOC 驱動器具有可復位的多元件保險絲,可保護計算機的 USB 端口免受短路和過流的影响。如果對USB端口施加超過1A的電流,保險絲將自動斷開連接,直到短路或過載被移除。
6、專用樂高馬達、電機接口
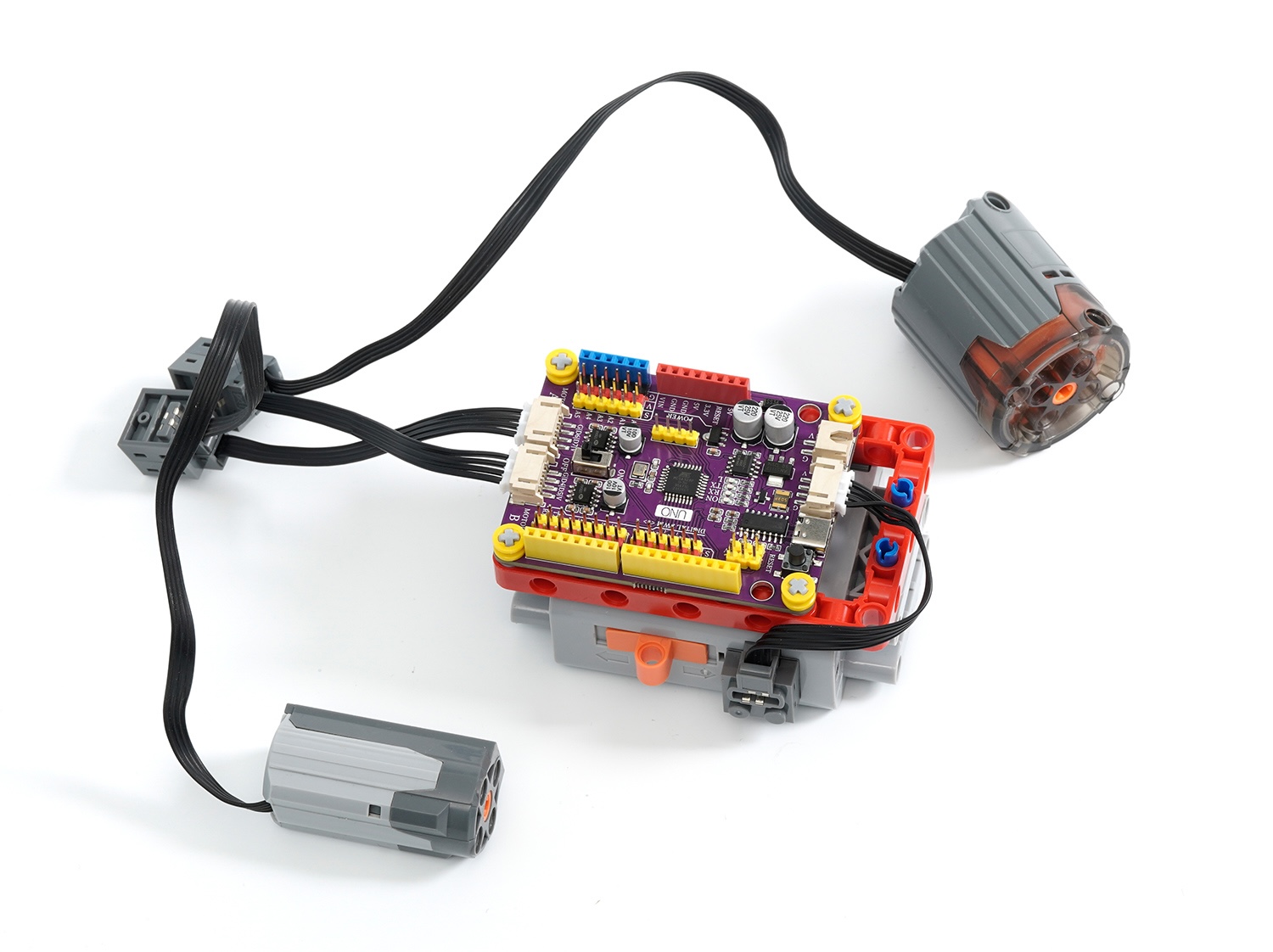
馬達接口採用PH2.0 4P端子接口,接口線序兼容樂高馬達線序,使用附帶的轉接线可直接與樂高馬達連接。
7、感應器及擴展配件接口
板載數字 G|V|S 接口連接感應器或執行器時更加的不便快捷,搭建項目時也不再需要擴展板。 G/V提供5V/2.5A的輸出功率,滿足大部分感測器和執行器的供電需求。
8、加裝擴展板
裝裝擴展板,你可以利用PH2.0端子線,實現一線連接開發板與感應器,簡化接線過程,讓初學者更加容易上手。
9、驅動下載及安裝
Windows 7、8、10、11 系統 USB 驅動下載及安裝方法:點擊查看
Mac OS 系統 USB 驱動下載:CH34X USB串行Mac OS驅動程序下載安裝說明
10、示例搭建设計及示例程式
1、板載電機/馬達驅動測試
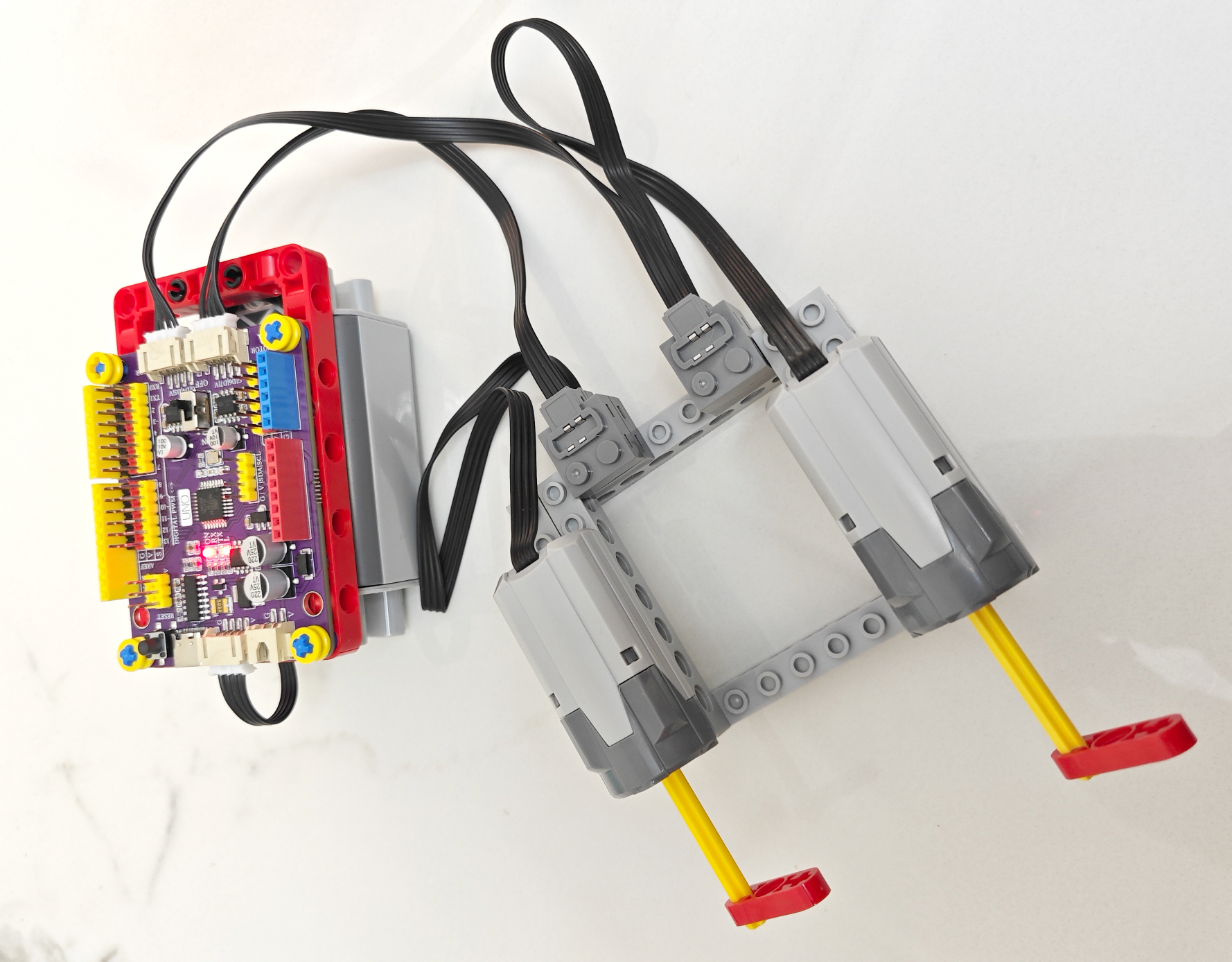
注意:樂高9686電池盒輸出為9V,電機驅動電源是直連9686電池盒輸入端,電機驅動電壓與電池盒電壓一致輸出也是9V,所以板載驅動只能接兼容樂高電機/馬達,非兼容樂高的電機通電工作後可能會燒壞。
因樂高電機的功耗較大,推薦使用南孚電池,其它電池會因電流不夠大導致不能正常工作。
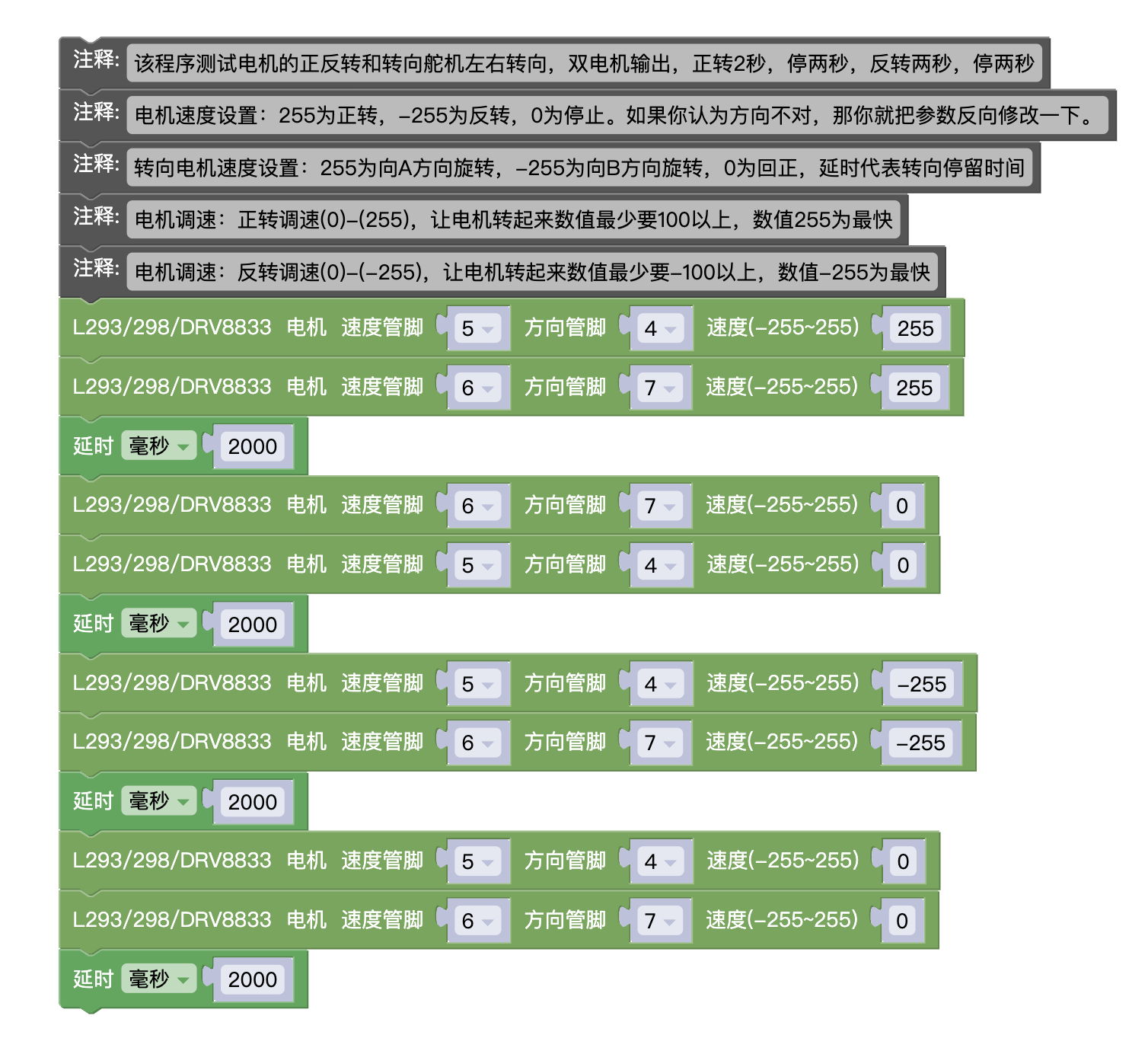
Mixly 米思齊測試程序1:點擊下載
注意:1、該程序適合測試轉向電機和電機,因為沒有加煞車程序,測試電機時電機的轉動慣性會影響轉動準確度。
2、遇到開發板不穩定的情况,通常是因为電池供電不足,請把速度值設小一點,例如(200)或(-200)
Arduino IDE 測試程序1(複製下方代碼貼到IDE編輯器中上傳)
注意:1、該程序只適合測試M號電機和轉向電機,因為沒有加煞車程序,測試電機時電機的轉動慣性會影響轉動準確度。
2、遇到開發板不穩定的情况,通常是因为電池供電不足,請把速度值設小一點,例如(200)或(-200)
//该程序测试电机的正反转和转向舵机左右转向,双电机输出,正转2秒,停两秒,反转两秒,停两秒
//电机速度设置:255为正转,-255为反转,0为停止。如果你认为方向不对,那你就把参数反向修改一下。
//转向电机速度设置:255为向A方向旋转,-255为向B方向旋转,0为回正,延时代表转向停留时间
//电机调速:正转调速(0)-(255),让电机转起来数值最少要100以上,数值255为最快
//电机调速:反转调速(0)-(-255),让电机转起来数值最少要-100以上,数值-255为最快
void setMotor8833(int speedpin, int dirpin, int speed) {
if (speed == 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, 0);
} else if (speed > 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, speed);
} else {
digitalWrite(dirpin, HIGH);
analogWrite(speedpin, 255 + speed);
}
}
void setup(){
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
digitalWrite(5, LOW);
digitalWrite(4, LOW);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
}
void loop(){
setMotor8833(5, 4, 255);
setMotor8833(6, 7, 255);
delay(2000);
setMotor8833(6, 7, 0);
setMotor8833(5, 4, 0);
delay(2000);
setMotor8833(5, 4, -255);
setMotor8833(6, 7, -255);
delay(2000);
setMotor8833(5, 4, 0);
setMotor8833(6, 7, 0);
delay(2000);
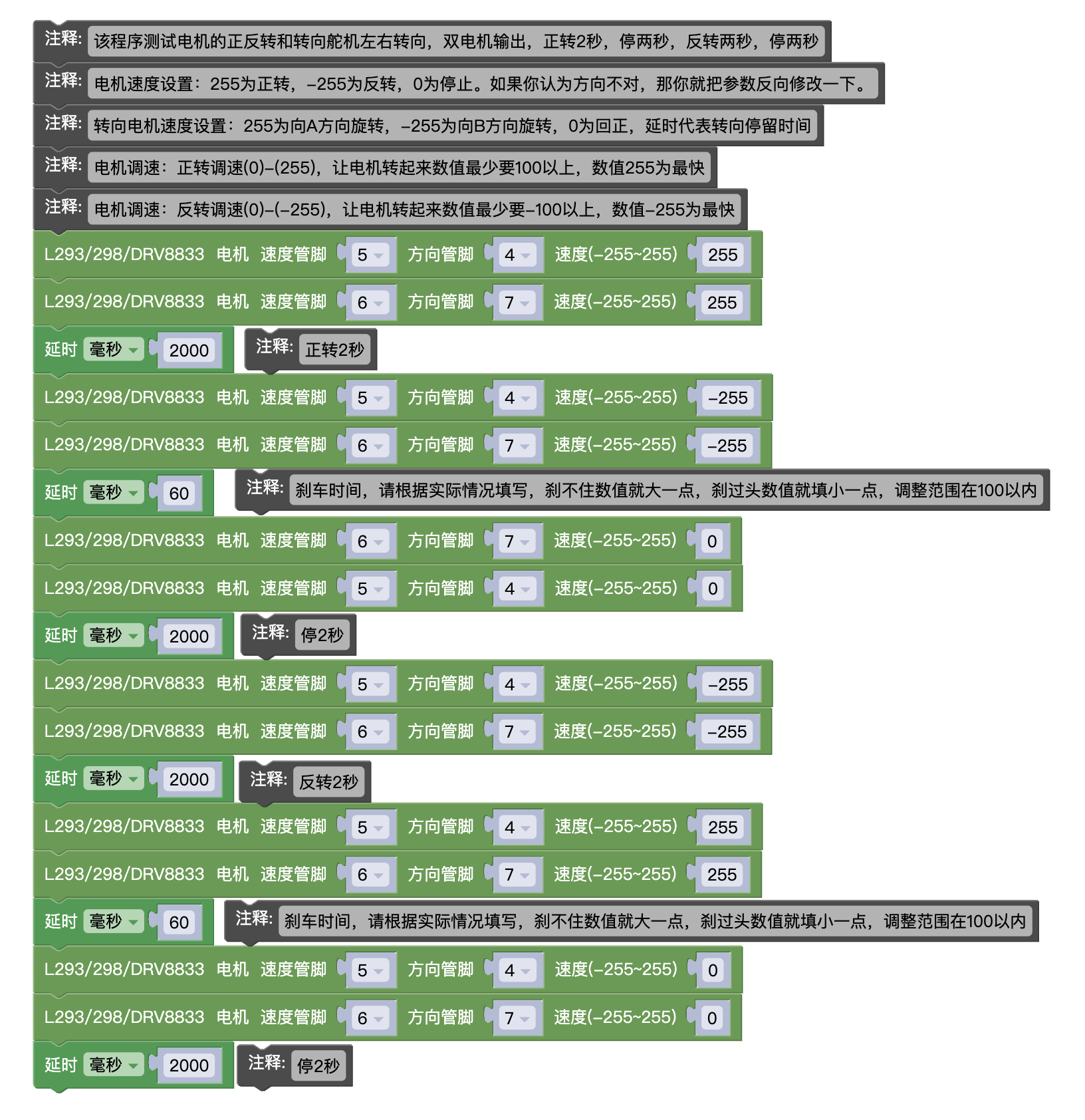
}Mixly 米思齊測試程序2:點擊下載
注意:1、該程序專用於測試電機,適用與M、L、XL電機測試,測試時請根據實際情況來調整煞車時間
2、遇到開發板不穩定的情况,通常是因为電池供電不足,請把速度值設小一點,例如(200)或(-200)
Arduino IDE 測試程序2(複製下方代碼貼到IDE編輯器中上傳)
注意:1、該程序專用於測試電機,適用與M、L、XL電機測試,測試時請根據實際情況來調整煞車時間
2、遇到開發板不穩定的情况,通常是因为電池供電不足,請把速度值設小一點,例如(200)或(-200)
void setMotor8833(int speedpin, int dirpin, int speed) {
if (speed == 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, 0);
} else if (speed > 0) {
digitalWrite(dirpin, LOW);
analogWrite(speedpin, speed);
} else {
digitalWrite(dirpin, HIGH);
analogWrite(speedpin, 255 + speed);
}
}
void setup(){
pinMode(5, OUTPUT);
pinMode(4, OUTPUT);
digitalWrite(5, LOW);
digitalWrite(4, LOW);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
}
void loop(){
setMotor8833(5, 4, 255);
setMotor8833(6, 7, 255);
delay(2000);
setMotor8833(5, 4, -255);
setMotor8833(6, 7, -255);
delay(60); //刹车时间
setMotor8833(6, 7, 0);
setMotor8833(5, 4, 0);
delay(2000);
setMotor8833(5, 4, -255);
setMotor8833(6, 7, -255);
delay(2000);
setMotor8833(5, 4, 255);
setMotor8833(6, 7, 255);
delay(60); //刹车时间
setMotor8833(5, 4, 0);
setMotor8833(6, 7, 0);
delay(2000);
}