

1、소개
2、시뮬레이션 그래프
3、모듈 매개변수
핀 이름 | 설명 |
|---|---|
G | GND(전원 입력 부정极) |
V | VCC(전원 입력 정극) |
INA | 모터 제어 신호 접점A |
INB | 모터 제어 신호 접점B |
전원전압: 3.3V / 5V
연결방식: PH2.0 케이블접속
설치방식: 더블스크루 고정
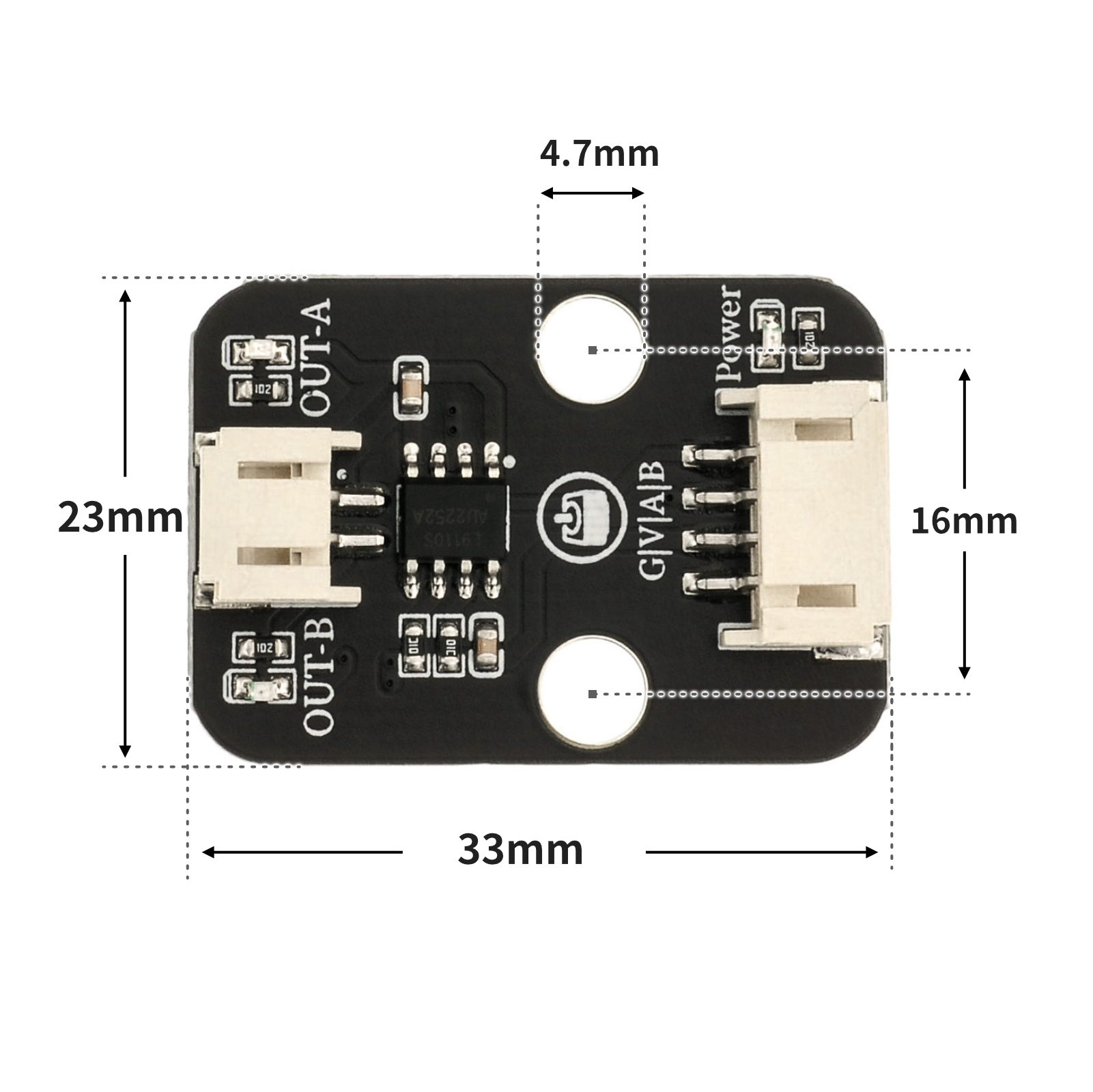
4、회로판 크기
5、아두이노 IDE 예제 프로그램
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
Arduino IDE 라이브러리 다운로드 및 导入 가이드:点击查看
예제 프로그램(UNO 개발 보드):
//电机驱动模块INA接D6,INB接D5。
#define INB 5 //定义电机B端口
#define INA 6 //定义电机A端口
void setup() {
pinMode(INB, OUTPUT); //设置电机B端口为输出模式
pinMode(INA, OUTPUT); //设置电机A端口为输出模式
}
void loop() {
analogWrite(INA, 255); //设置电机A端口为高电平,pwm调速范围(0-255)
analogWrite(INB, 0); //设置电机B端口为低电平
delay(2000); //2s之后电机停止
analogWrite(INA, 0); //设置电机A端口为低电平
analogWrite(INB, 0); //设置电机B端口为低电平
delay(2000); //电机反转2s然后正转
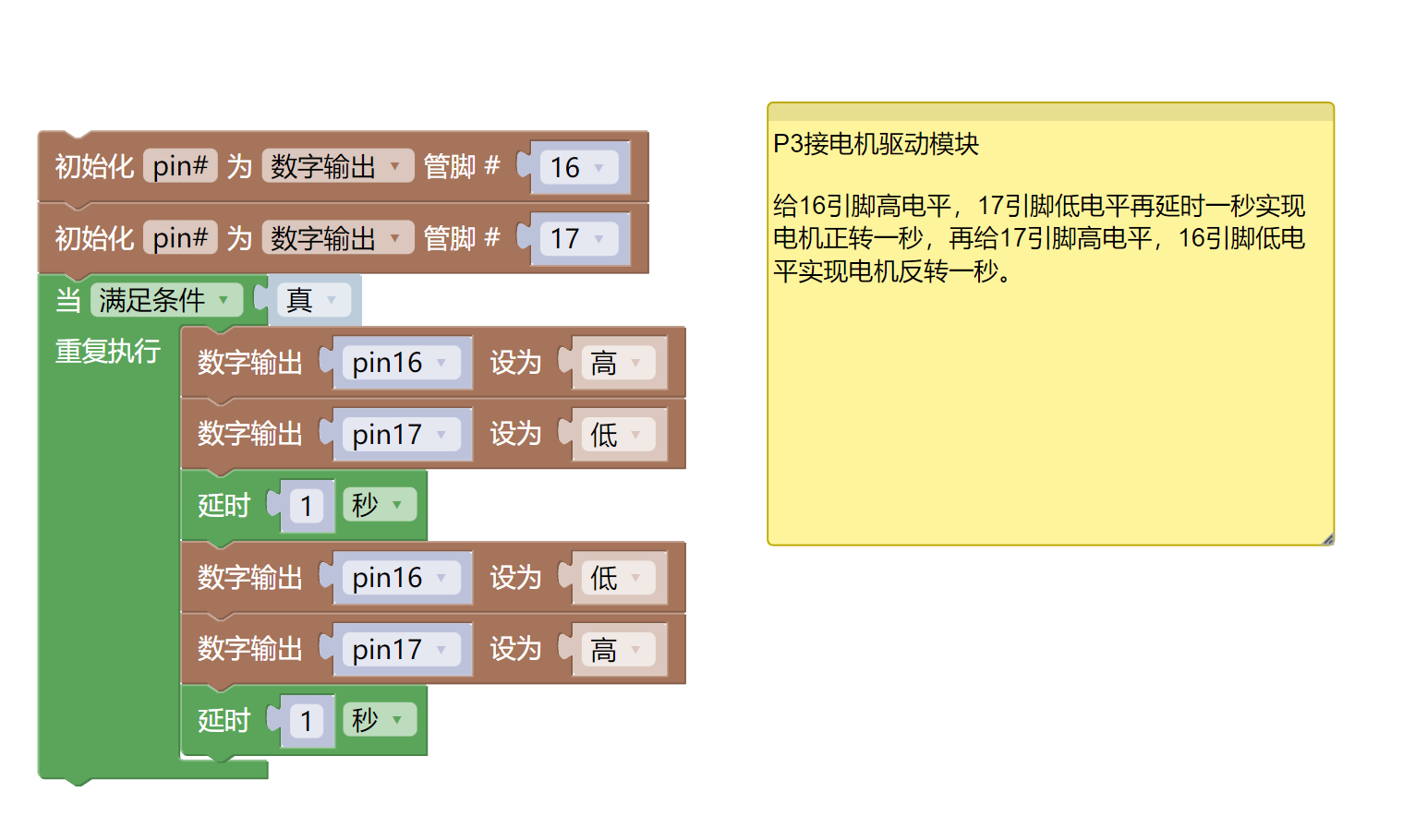
}6、ESP32 Python 예제(Mixly IDE /미스키에 적용됨)
개발 보드를 선택하세요 Python ESP32 【ESP32 Generic(4MB)】를 코드 모드로 전환하여 업로드하십시오
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미시지(Mixly)IDE ESP32 라이브러리 다운로드 및 가져오기 가이드:点击查看
예제 프로그램(ESP32-Python):
import machine
import time
pin16 = machine.Pin(16, machine.Pin.OUT)
pin17 = machine.Pin(17, machine.Pin.OUT)
while True:
pin16.value(1)
pin17.value(0)
time.sleep(1)
pin16.value(0)
pin17.value(1)
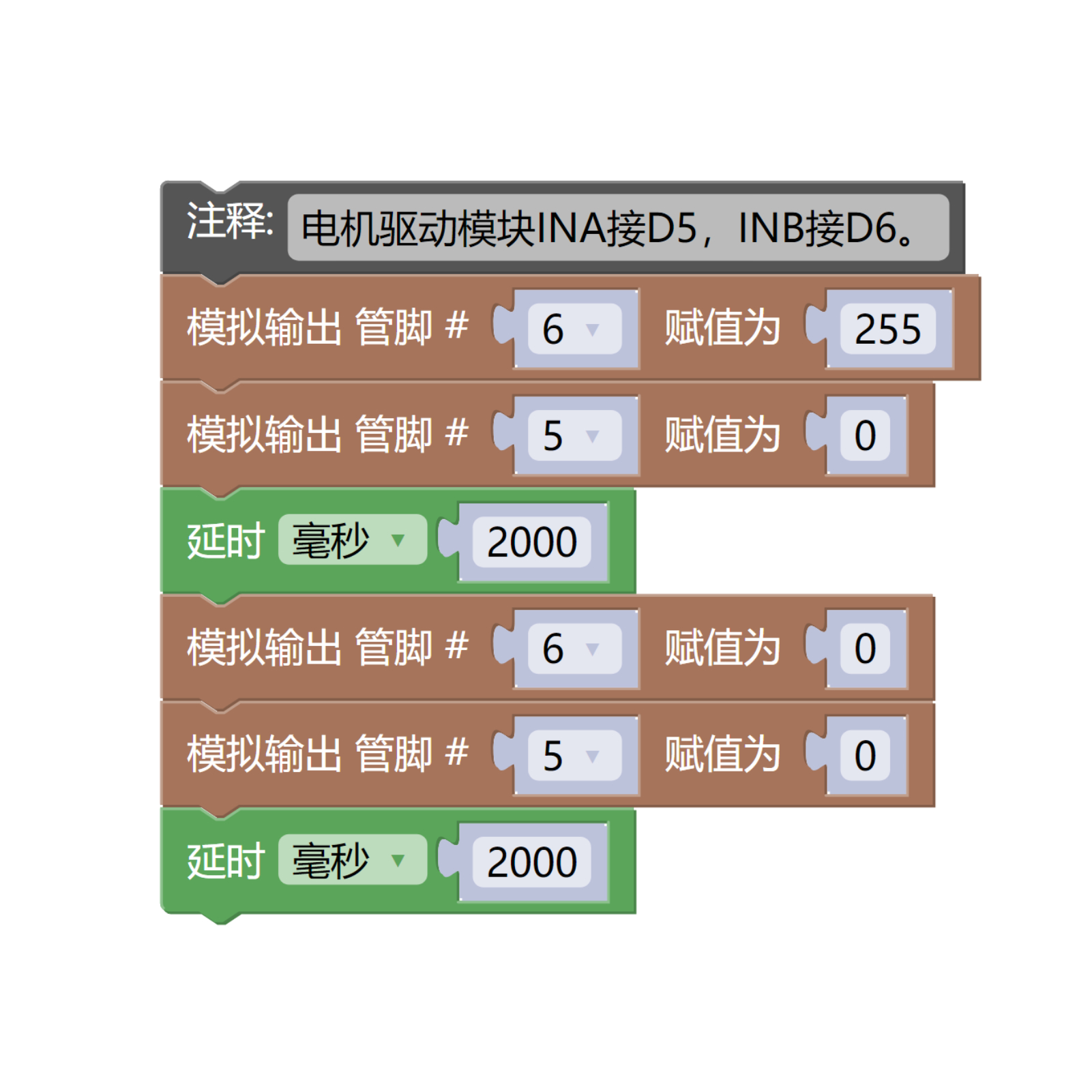
time.sleep(1)7、미스키 Mixly 예제 프로그램(그래픽 언어)
예제 프로그램(UNO 개발 보드):다운로드 클릭
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미스키(Mixly)IDE Arduino 라이브러리 다운로드 및 가져오기 가이드:点击查看
예제 프로그램(ESP32 개발 보드):다운로드 클릭
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미시지(Mixly)IDE ESP32 라이브러리 다운로드 및 가져오기 가이드:点击查看
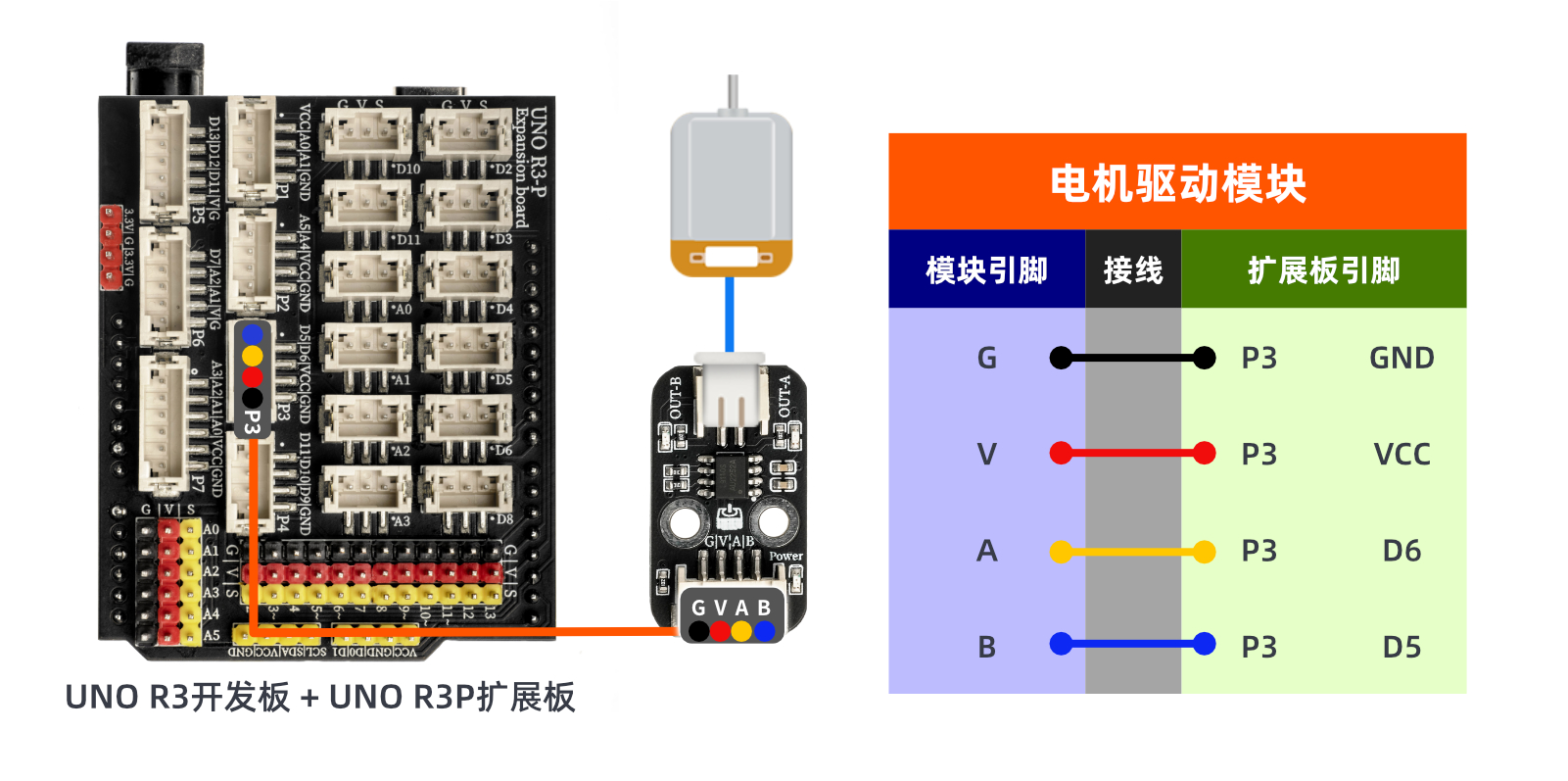
8、테스트 환경 구축
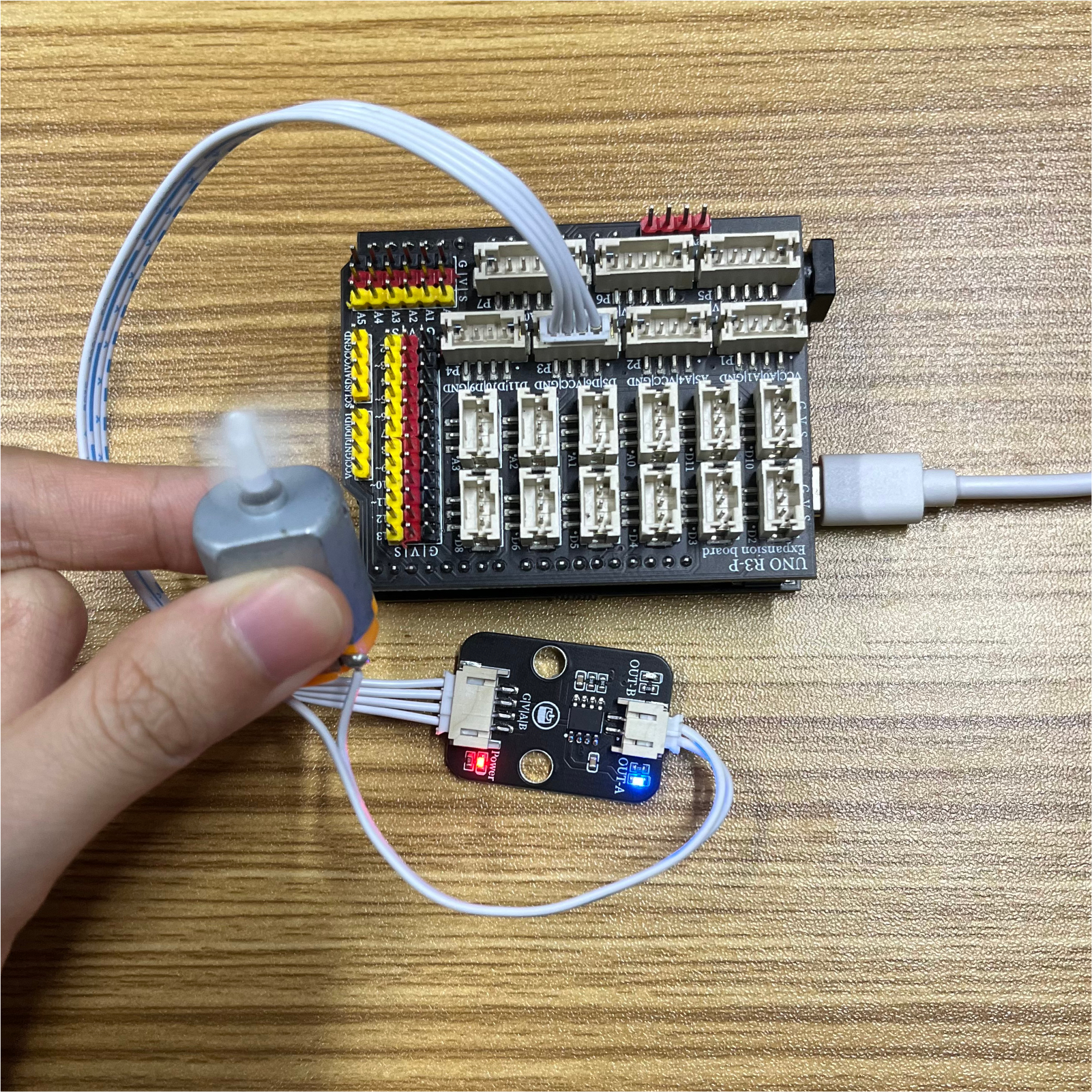
Arduino UNO 테스트 환경 구축
부품 준비:“
UNO-R3 개발 보드 *1
UNO-R3 P 확장판 *1
USB type-c 데이터 케이블 *1
전력기(2.0핀 포함)*1
전동 드라이브 모듈(HS-F04L)*1
PH2.0 4P둘쪽 머리 끝 케이블 *1
전기 연결도):
ESP32 테스트 환경 설정
부품 준비:“업데이트 대기 중...
전기 연결도): 업데이트 대기 중...
9、비디오 강의
Arduino UNO 비디오 강의:点击查看
ESP32 Python 비디오 강의:업데이트 대기 중
10、테스트 결과
Arduino UNO 테스트 결과:
선을 연결한 장치에 프로그램을 Arduino UNO 개발판에 업로드한 후,电动机이 프로그램에 따라 1초 회전하고 1초 멈춘다가 반복적으로 작동합니다。지금 당신은直流 모터의 기본 이론과 프로그래밍을 확실하게 익혔습니다.그는 앞으로와 뒤로 갈 수 있으며, 속도를 조절할 수도 있습니다.그리고, 배운 지식을 사용하여 더 많은伟大한 애플리케이션을 만들 수 있습니다.
ESP32 Python 테스트 결과:
선을 연결한 장치에 프로그램을 업로드한 후, ESP32 개발 보드에 프로그램을 업로드한 후,电动机이 프로그램에 설정된 방식으로 1초 회전하고 1초 멈추며 계속 반복적으로 작동합니다。지금 당신은直流 전동기의 기본이론과 프로그래밍을 이미 잘 이해했습니다.그는 앞으로와 뒤로 가는 것 외에도 속도를 조절할 수 있습니다.그런 다음, 배운 지식을 활용하여 더 많은 대단한 애플리케이션을 만들 수 있습니다.