
1、介紹
9g小舵機是一種位置(角度)伺服的驅動器,適用於那些需要角度不斷變化並可以保持的控制系统。常見於航模,飛機模型,遙控機器人及機械部件當中。在使用中,舵機的配件通常包含一個能把舵機固定到基座上的支架以及可以套在驅動軸上的舵盤,通過舵盤上的孔可以連接其他物體構成傳動模型。
2、模組參數
引腳名稱 | 描述 |
|---|---|
棕色線 | GND(電源輸入負極) |
紅色線 | VCC(電源輸入正極) |
橙色線 | 控制信號引腳 |
供電電壓:4.8V到6V DC
待機電流:5mA
極限角度: 210°±5%
扭力: 1.3到1.7kg/cm
工作溫度:-10℃到60℃
濕度範圍:60%±10%
轉速: 0.09到0.10 sec/60°(4.8V)
信號週期:20 毫秒
信號高電平時間範圍:1000 到 2000 us/週期
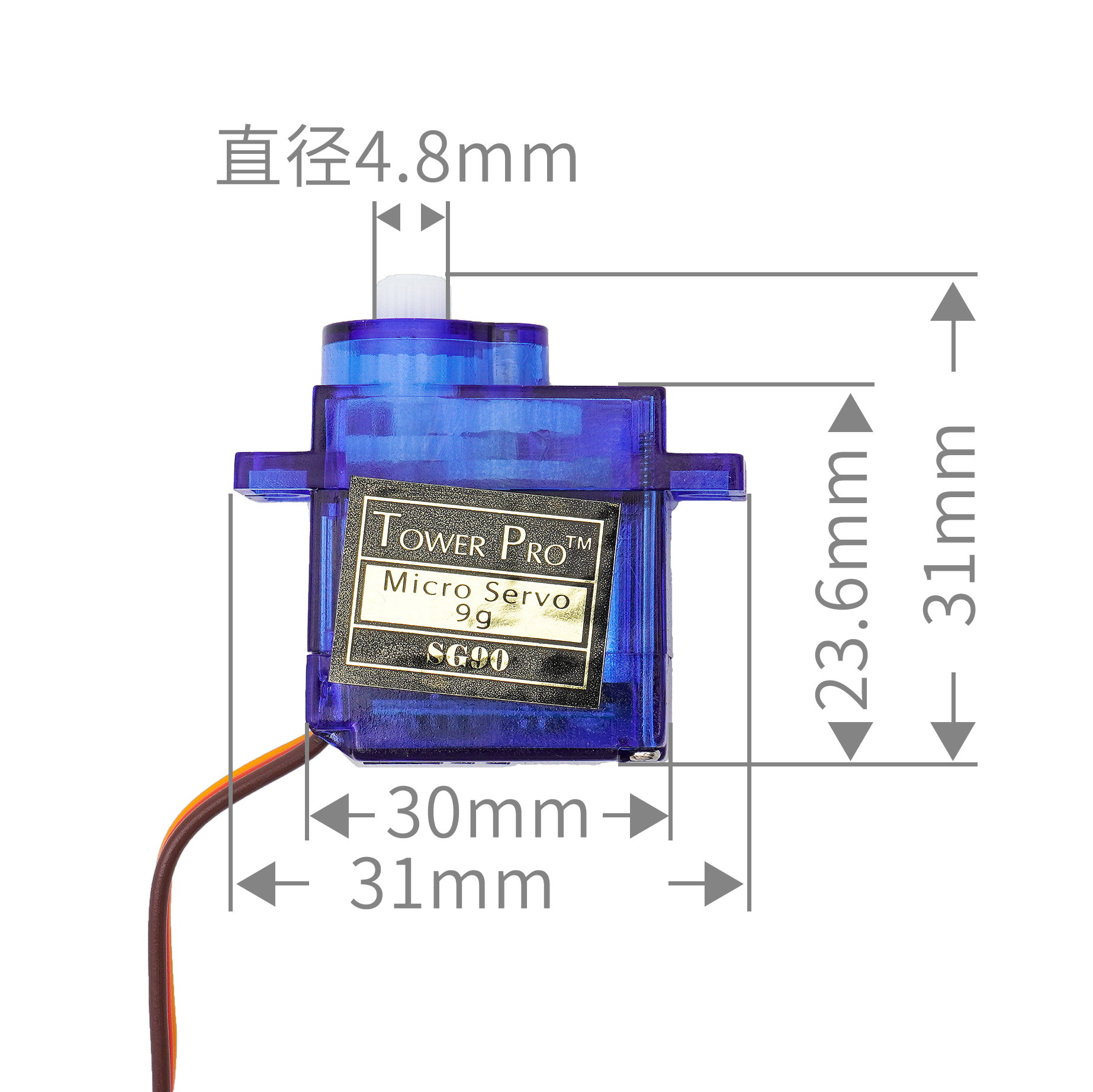
3、舵機尺寸
4、Arduino IDE示例程式
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
Arduino IDE 庁件文件下載及導入教範:點擊查看
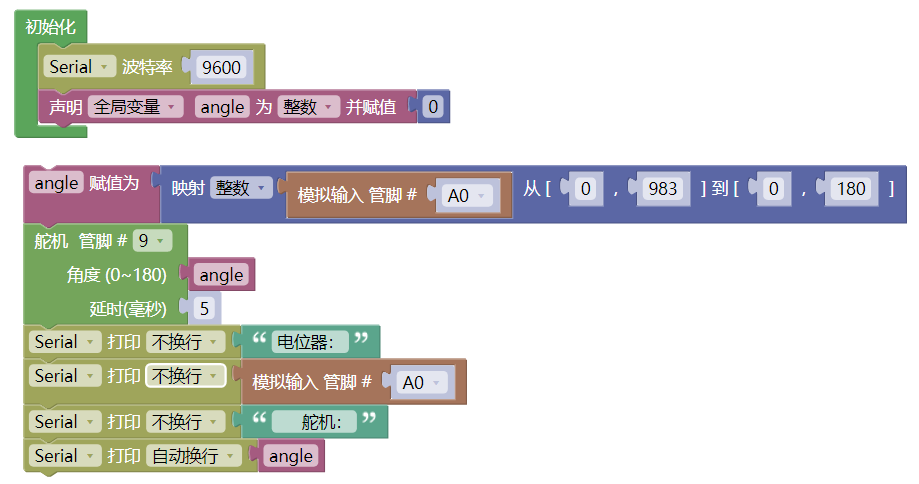
示範程序(UNO開發板):
#include <Servo.h>
volatile int angle;
Servo servo_9;
void setup(){
Serial.begin(9600);
angle = 0;
pinMode(A0, INPUT);
servo_9.attach(9);
}
void loop(){
angle = (map(analogRead(A0), 0, 983, 0, 180));
servo_9.write(angle);
delay(5);
Serial.print("电位器:");
Serial.print(analogRead(A0));
Serial.print(" 舵机:");
Serial.println(angle);
}5、ESP32 Python 示例(適用於Mixly IDE /米思齊)
開發板選擇 Python ESP32 【ESP32 Generic(4MB)】切換為代碼模式上傳
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE ESP32庫檔案下載及匯入教學:點擊查看
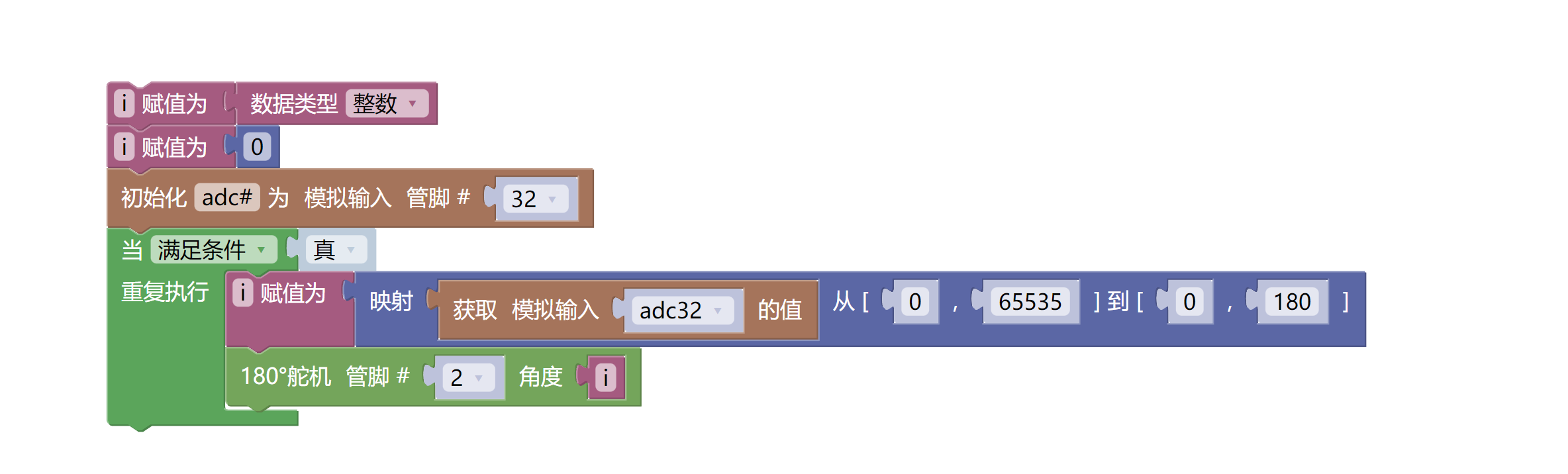
示例程式(ESP32-Python):
import machine
from mixpy import math_map
import servo
i = int
i = 0
adc32 = machine.ADC(machine.Pin(32))
while True:
i = (math_map(adc32.read_u16(), 0, 65535, 0, 180))
servo.servo180_angle(2,i)6、米思齊Mixly示例程式(圖形化語言)
示例程序(UNO開發板):點擊下載
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE Arduino 圖庫檔案下載及匯入教學:點擊查看
示例程序(ESP32開發板):點擊下載
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE ESP32庫檔案下載及匯入教學:點擊查看
7、測試環境搭建
Arduino環境搭建
準備配件:
HELLO STEM UNO R3 PRO 開發板 *1
USB type-c 資料線 *1
sg90 9g舵機*1
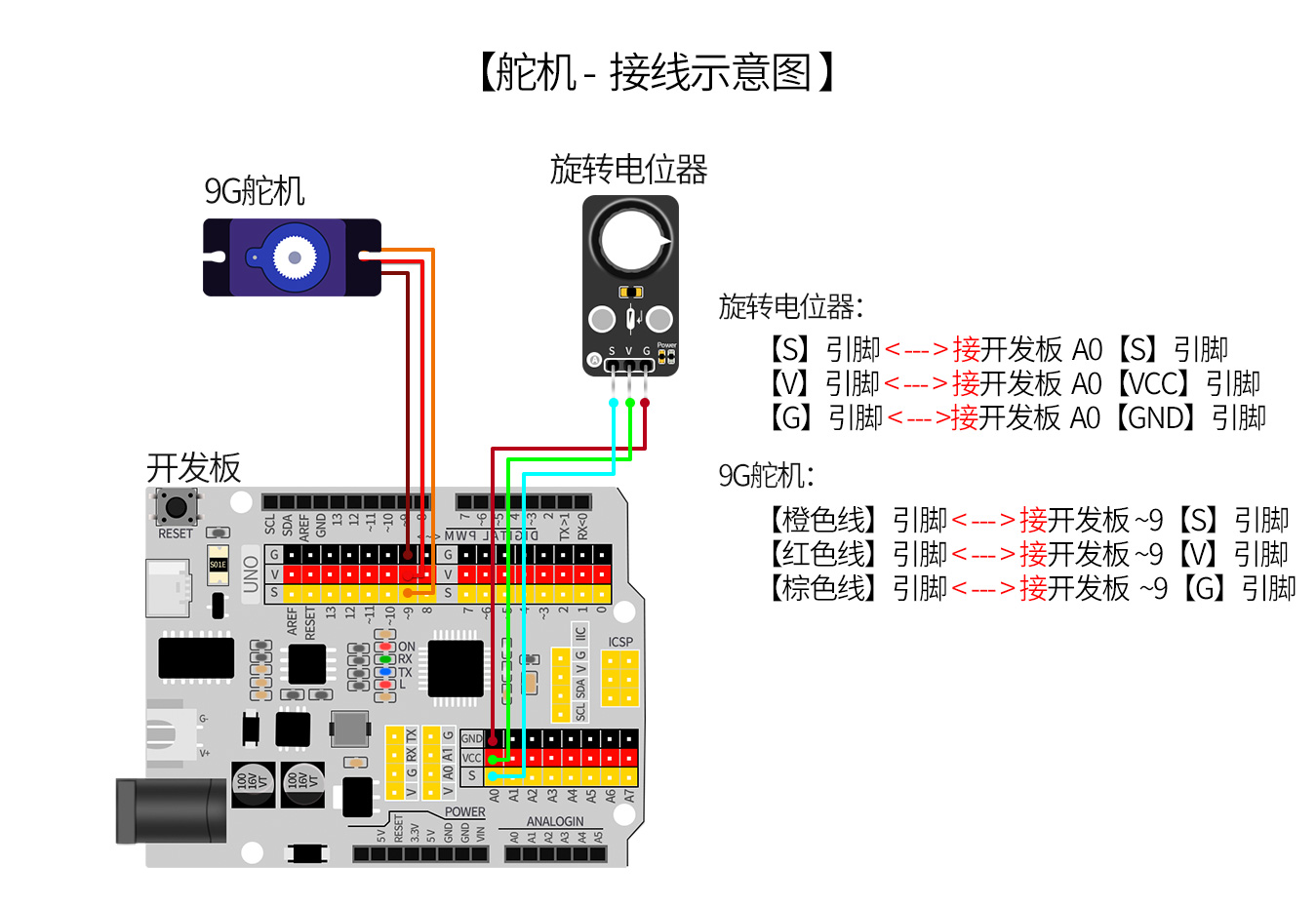
旋轉電位器(HS-S28A)*1
1P母對母杜邦線 *3條 或 3P母對母杜邦線 *1條
電路接線圖:
ESP32 測試環境搭建
準備配件:等更新...
電路接線圖:等更新...
8、視頻教學
視頻教學:點擊查看
9、測試結果
Arduino UNO 混试结果:
將設備連接好線之後,上傳程式到Arduino UNO 開發板之後,將會發現電機會根據程式先設定轉2秒停2秒一直循環。現在您一定已經掌握了直流電機的基本理論和編程。你不仅可以让它前進和後退,還可以調節它的速度。此外,您可以使用所學的知識做更多很棒的应用程序。