

1、介紹
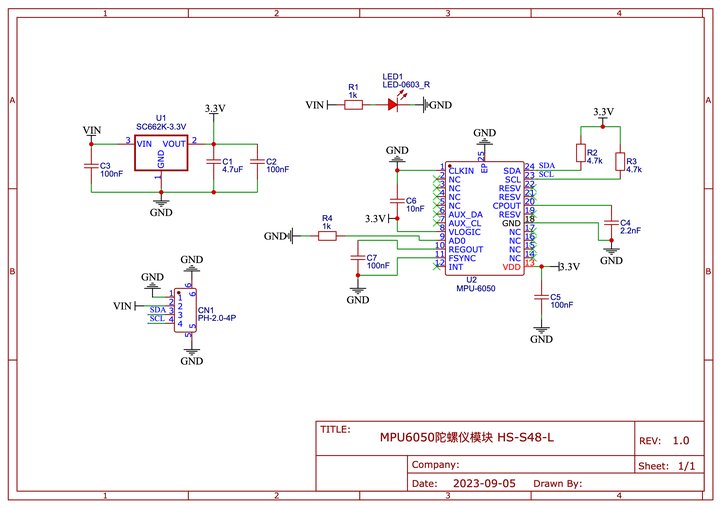
2、原理圖
3、模組參數
引腳名稱 | 描述 |
|---|---|
GND | GND(電源輸入負極) |
VCC | VCC(電源輸入正極) |
SDA | 資料傳輸引腳 |
SCL | 通訊時鐘引腳 |
供電電壓:3.3V / 5V
連接方式:PH2.0 4P端子線
安裝方式:樂高搭建
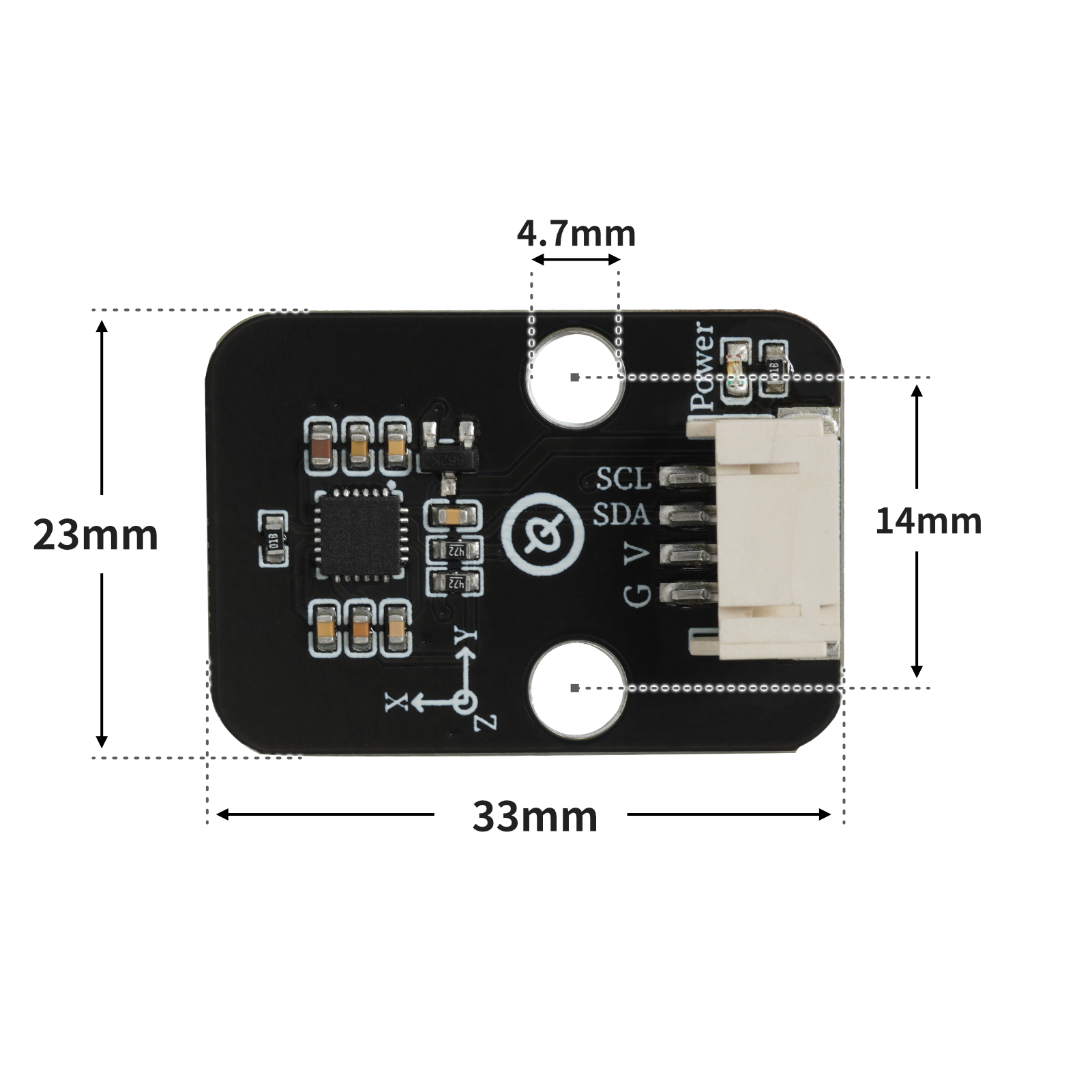
4、電路板尺寸
5、Arduino IDE示範程序
示例程序(UNO開發板):點擊下載
#include <MPU6050_tockn.h>
#include <Wire.h>
MPU6050 mpu6050(Wire);
void setup(){
Serial.begin(9600);
Wire.begin();
mpu6050.begin();
mpu6050.calcGyroOffsets(true);
}
void loop(){
//读取MPU6050数据\n连接方式:MPU6050连接主控板的IIC接口
mpu6050.update();
Serial.print("\nX轴加速度:");
Serial.print(mpu6050.getAccX());
Serial.print("\tY轴加速度:");
Serial.print(mpu6050.getAccY());
Serial.print("\tZ轴加速度:");
Serial.println(mpu6050.getAccZ());
Serial.print("X轴角度:");
Serial.print(mpu6050.getAngleX());
Serial.print("\tY轴角度:");
Serial.print(mpu6050.getAngleY());
Serial.print("\tZ轴角度:");
Serial.println(mpu6050.getAngleZ());
Serial.print("温度:");
Serial.println(mpu6050.getTemp());
Serial.print("###############################################");
delay(1000);
}示例程序(ESP32開發板—基於Python語言,不能用Arduino IDE上傳代碼):
import mpu6050
import machine
import time
# 请勿修改变量
i2c_extend = machine.SoftI2C(scl = machine.Pin(22), sda = machine.Pin(21), freq = 100000)
# 请勿修改变量
# 初始化语句请勿修改里面的变量
accel = mpu6050.accel(i2c_extend)
while True:
# 获传感器数据语句,请勿修改里面的变量。获取的值为字典类型
print(accel.get_values())
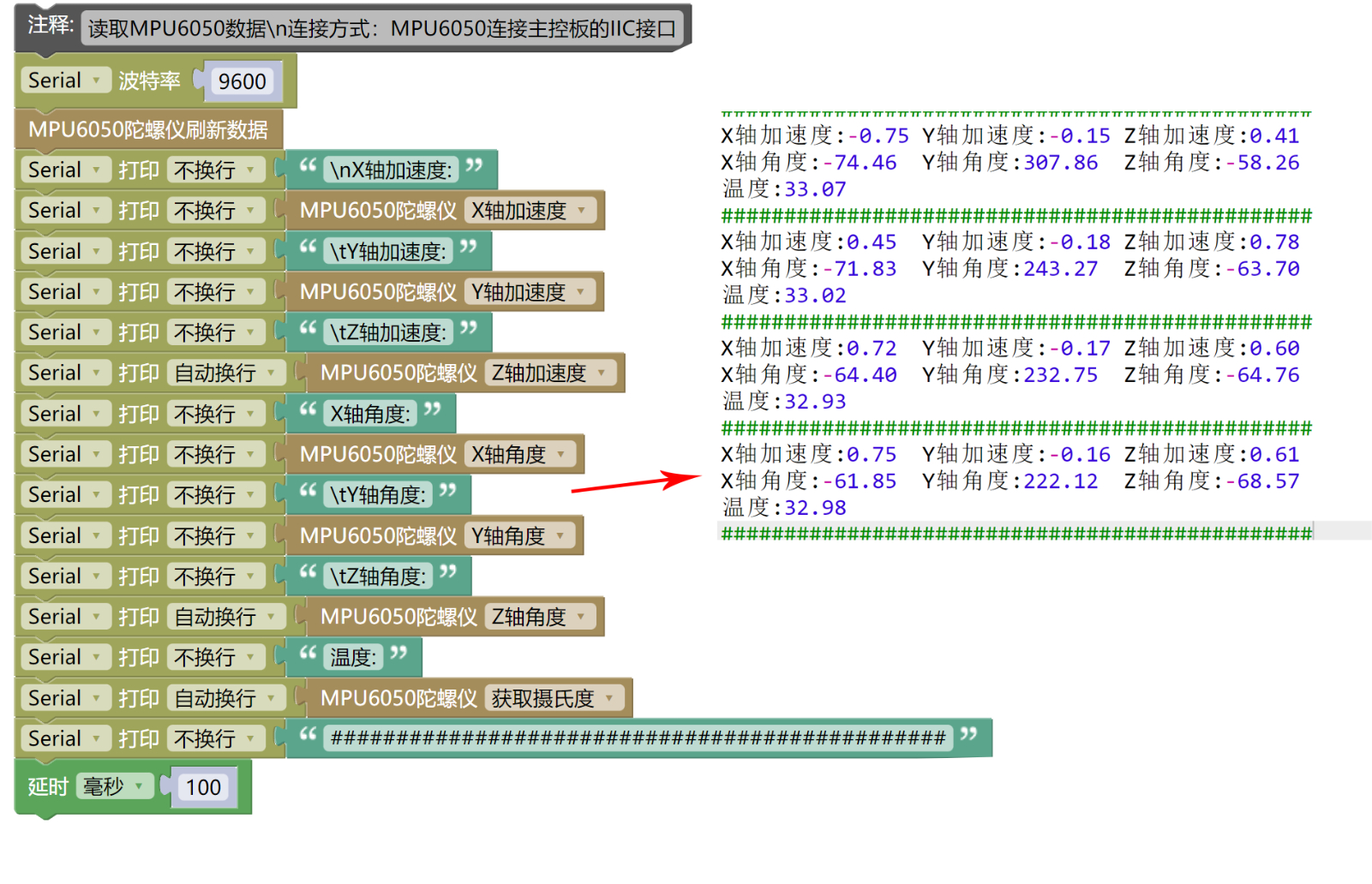
time.sleep_ms(300)6、米思齊Mixly示例程式(圖形化語言)
示例程序(UNO開發板):點擊下載
示例程序(ESP32開發板):點擊下載
7、測試環境搭建
Arduino環境搭建
準備配件:
HELLO STEM UNO R3 開發板 *1
HELLO STEM UNO 擴展板 *1
USB type-c 資料線 *1
MPU6050陀螺儀模組*1
PH2.0 4P端子線 *1
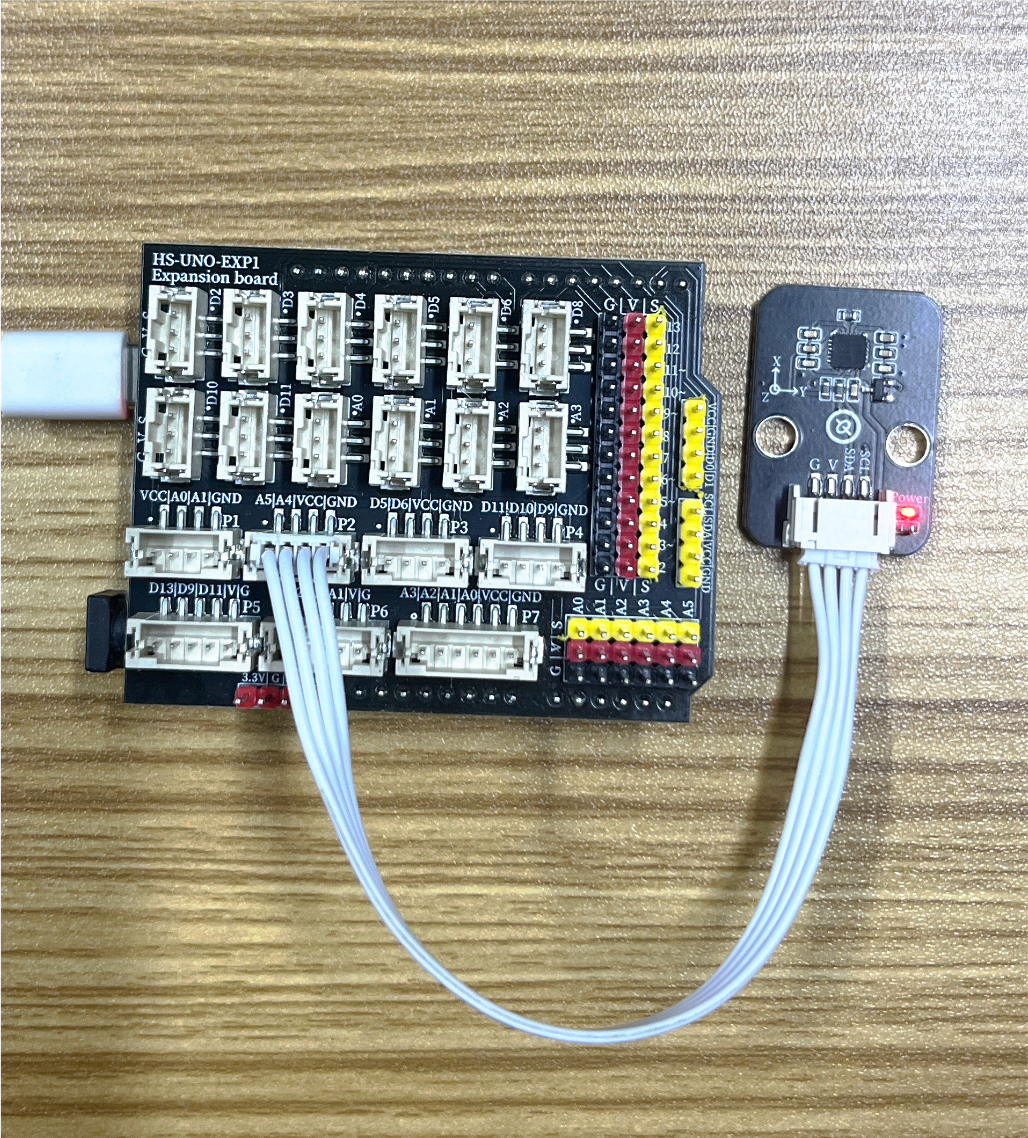
電路接線圖:
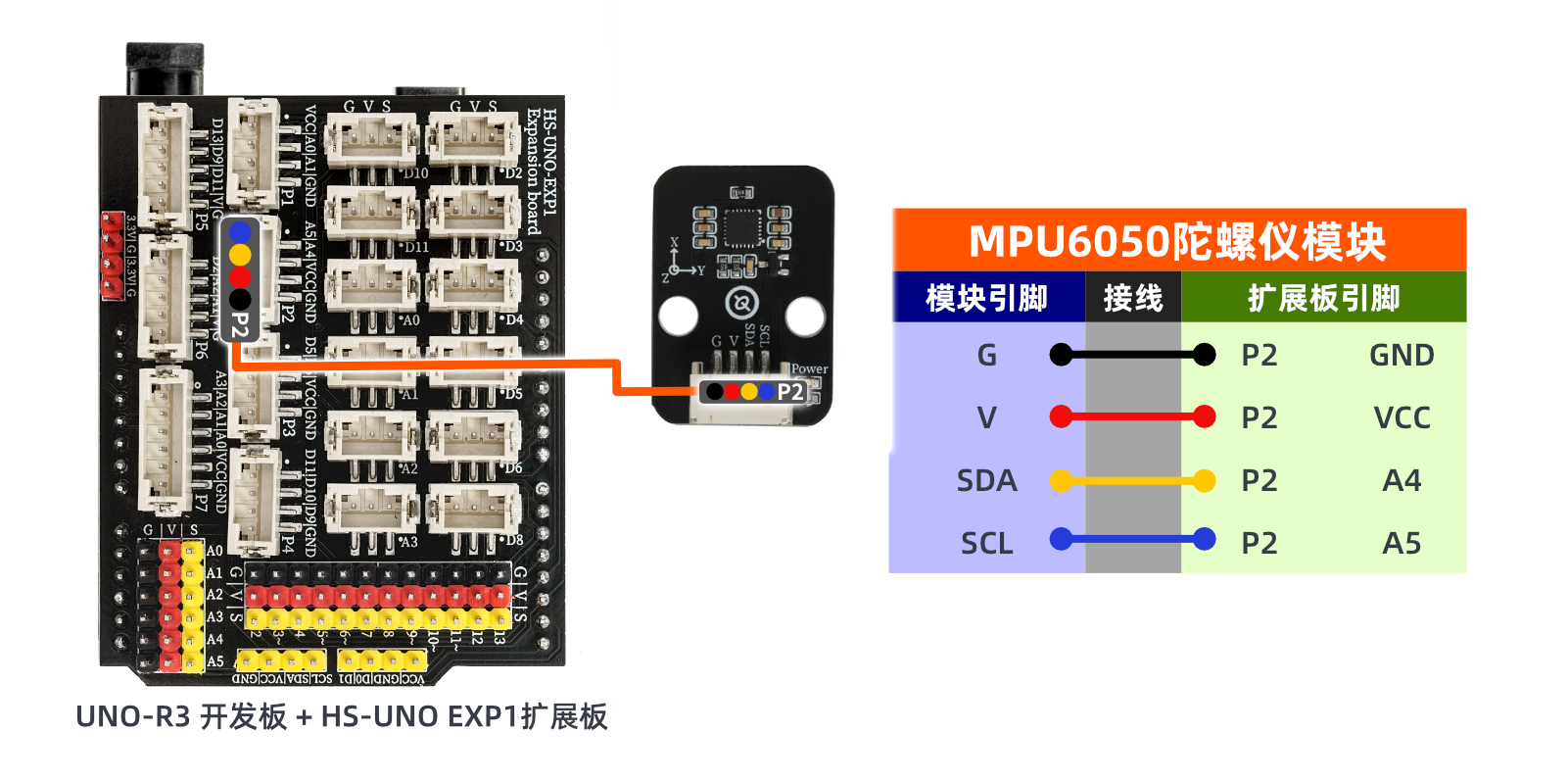
Micropython環境搭建
準備配件:
ESP32EA MOC 開發板 *1
ESP32-EXP1 扩展板 *1
USB type-c 資料線 *1
MPU6050陀螺儀模組*1
PH2.0 4P端子線 *1
電路接線圖:

8、加入Arduino庫檔案及MicroPython環境庫檔案
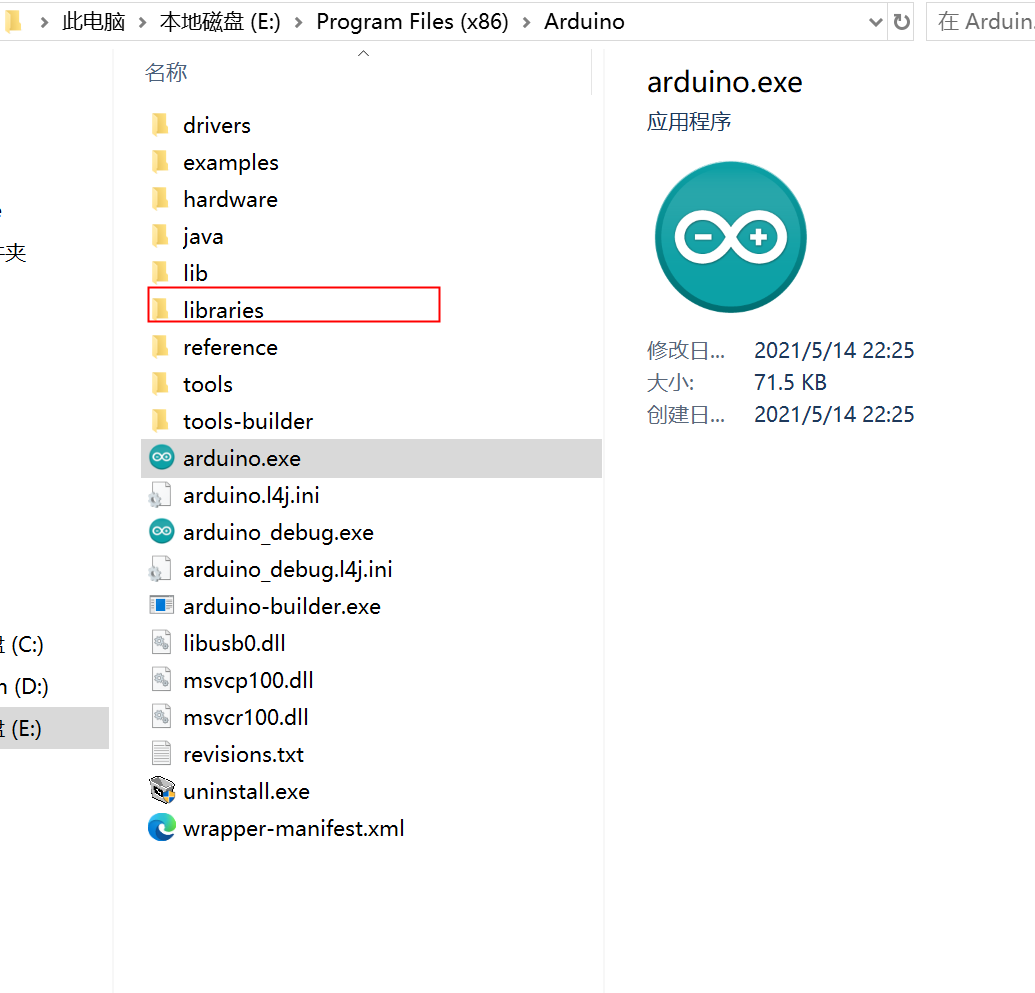
首先找到Arduino庫資料夾:
把庫文件複製到Arduino IDE軟體目錄下的libraries資料夾中即可:
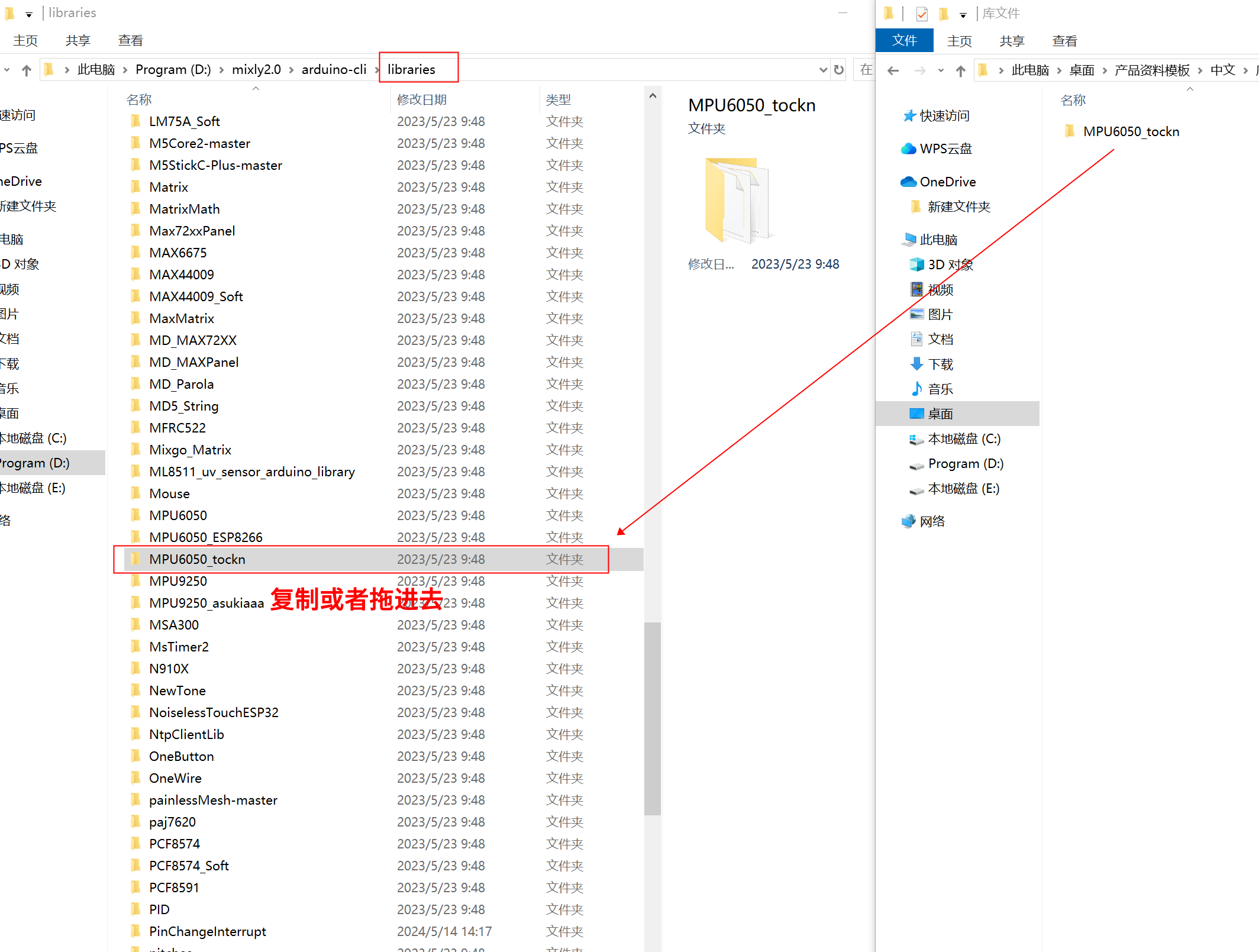
庫文件:點擊下載
9、添加MicroPython環境庫文件
安裝庫檔案請點擊這裡:參考連結
10、視頻教學
視頻教學:點擊查看
11、測試結論
器件連接好線之後,將上述程序上傳到開發板之後,即可看到MPU6050陀螺儀模組數據測試