
1、소개
2、모듈 파라미터
핀 이름 | 설명 |
|---|---|
회색선 | GND(전원 입력 부정极) |
빨간선 | VCC(전원 입력 정극) |
오렌지선 | 제어 신호 핀 |
전원전압: 4.8V에서 6V DC
스톱 모드 전류: 5mA
최대 각도: 210°±5%
扭矩: 1.3에서 1.7kg/cm까지
작업 온도: -10℃에서 60℃까지
습도 범위: 60%±10%
회전 속도: 0.09에서 0.10 sec/60°(4.8V)
신호 주기: 20 ms
신호 고전압 시간 범위: 1000에서 2000 us/주기
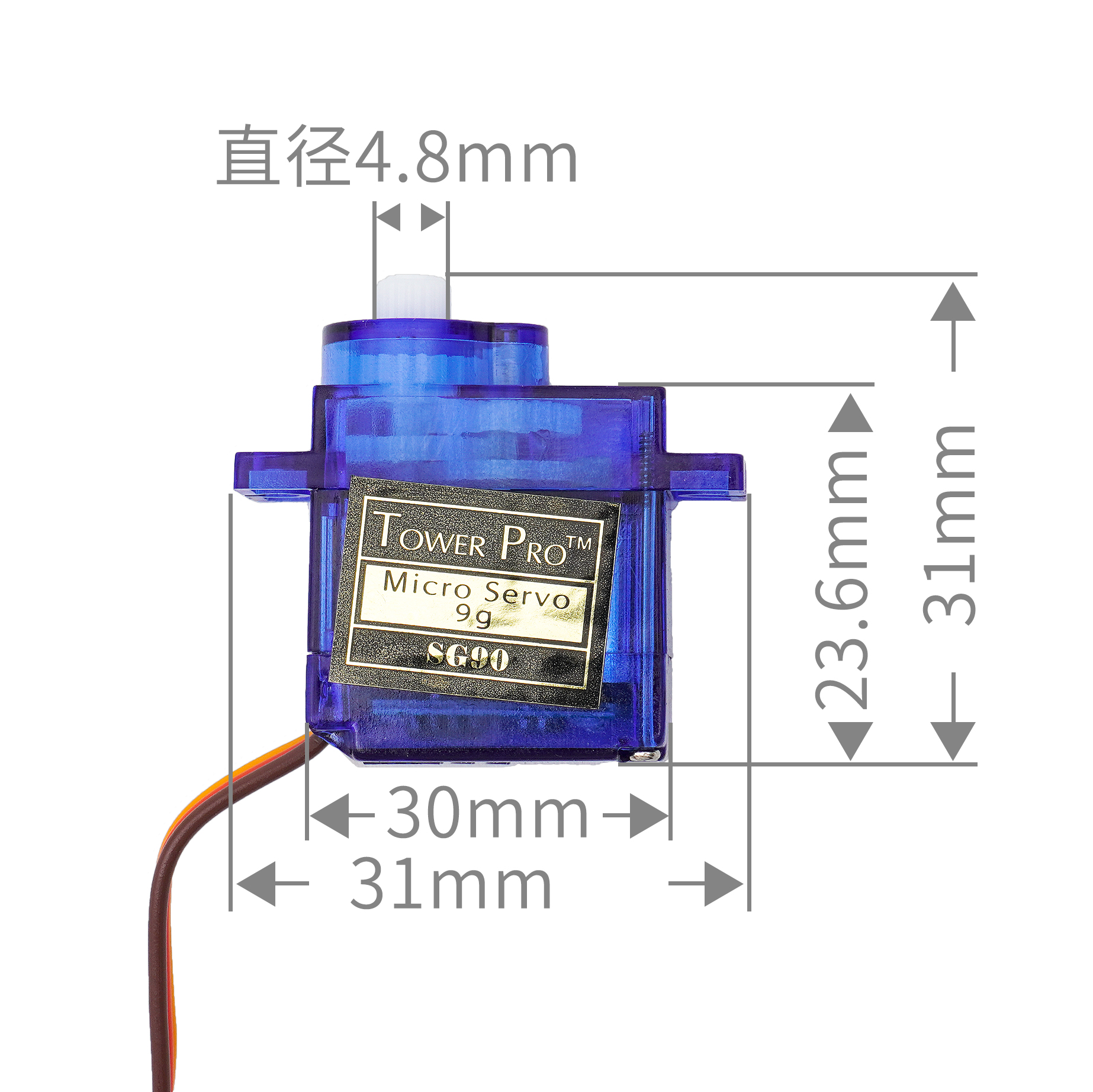
3、기어 모터 크기
4、Arduino IDE 예제 프로그램
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
Arduino IDE 라이브러리 다운로드 및 导入 가이드:点击查看
예제 프로그램(UNO 개발 보드):
#include <Servo.h>
volatile int angle;
Servo servo_9;
void setup(){
Serial.begin(9600);
angle = 0;
pinMode(A0, INPUT);
servo_9.attach(9);
}
void loop(){
angle = (map(analogRead(A0), 0, 983, 0, 180));
servo_9.write(angle);
delay(5);
Serial.print("电位器:");
Serial.print(analogRead(A0));
Serial.print(" 舵机:");
Serial.println(angle);
}5、ESP32 Python 예제(Mixly IDE / 미시지에 적용됨)
개발 보드를 선택하세요 Python ESP32 【ESP32 Generic(4MB)】를 코드 모드로 전환하여 업로드하십시오
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미시지(Mixly)IDE ESP32 라이브러리 다운로드 및 가져오기 가이드:点击查看
예제 프로그램(ESP32-Python):
import machine
from mixpy import math_map
import servo
i = int
i = 0
adc32 = machine.ADC(machine.Pin(32))
while True:
i = (math_map(adc32.read_u16(), 0, 65535, 0, 180))
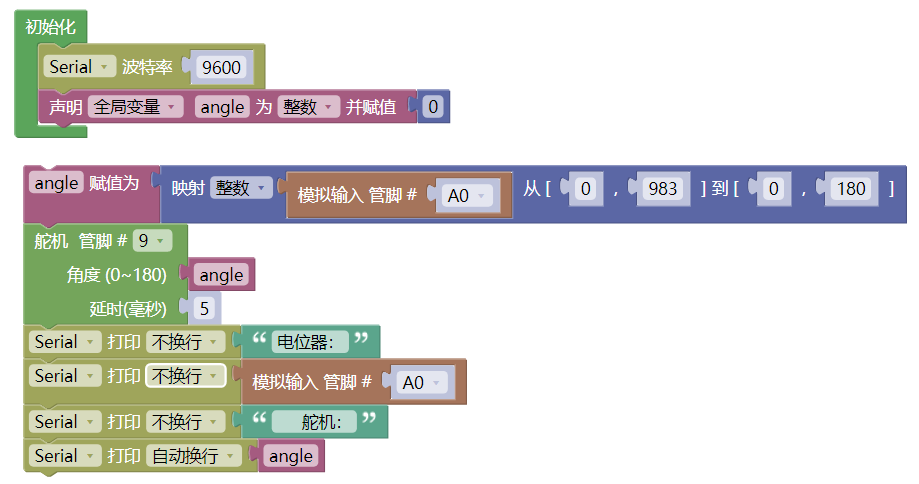
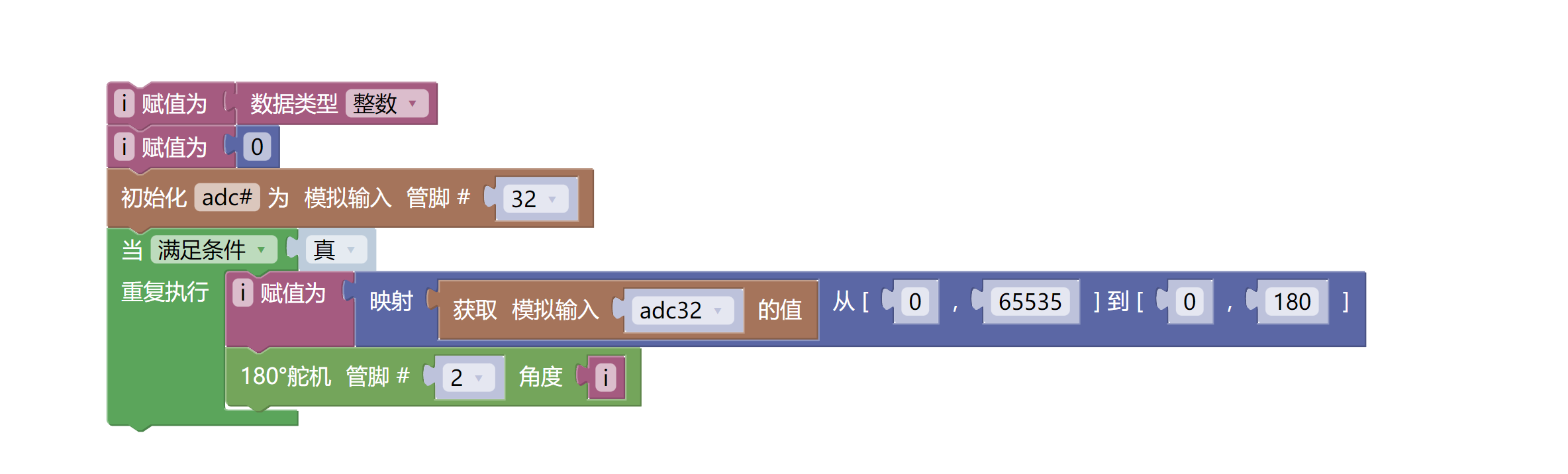
servo.servo180_angle(2,i)6、미시치 Mixly 예제 프로그램(그래픽 언어)
예제 프로그램(UNO 보드):다운로드 클릭
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미스키(Mixly)IDE Arduino 라이브러리 다운로드 및 가져오기 가이드:点击查看
예제 프로그램(ESP32 개발 보드):다운로드 클릭
주의: 프로그램을 업로드할 때 라이브러리 파일 오류가 표시되면 먼저 라이브러리 파일을 가져오세요!
미시지(Mixly)IDE ESP32 라이브러리 다운로드 및 가져오기 가이드:点击查看
7、테스트 환경 구축
Arduino 환경 구축
부품 준비:“
HELLO STEM UNO R3 PRO 개발보드 *1
USB type-c 데이터 케이블 *1
sg90 9g 기어 모터*1
회전电位자(HS-S28A)*1
1P 모터 모터 드뷰론 라인 *3개 또는 3P 모터 모터 드뷰론 라인 *1개
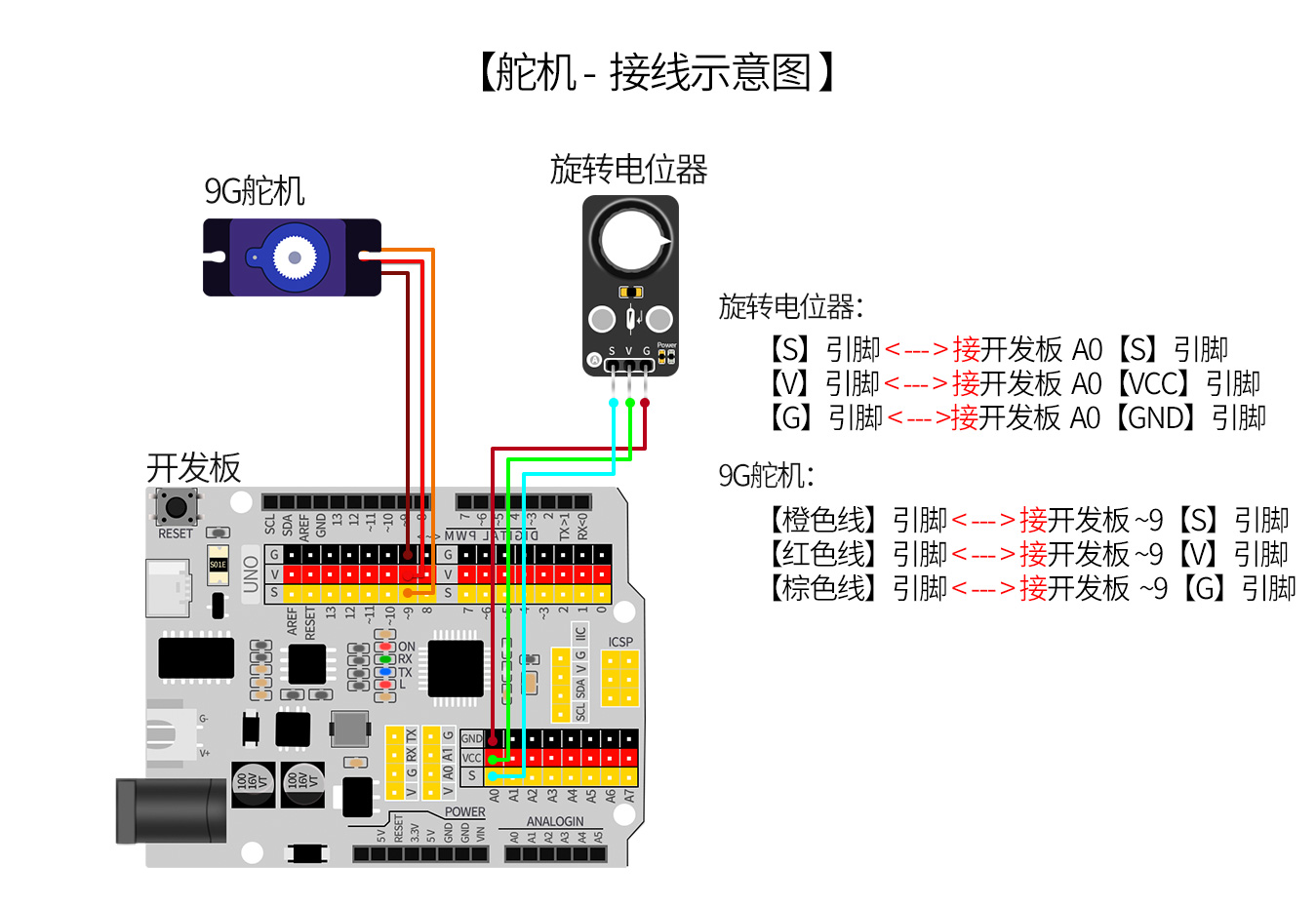
전기 연결도):
ESP32 테스트 환경 설정
부품 준비:“업데이트 대기 중...
전기 연결도): 업데이트 대기 중...
8、비디오教程
비디오 강의:点击查看
9、테스트 결과
Arduino UNO 테스트 결과: