

1、介紹
2、原理圖
3、模組參數
引腳名稱 | 描述 |
|---|---|
TRIG | 控制端 |
ECHO | 接收端 |
VCC | VCC(電源輸入正極) |
GND | GND(電源輸入負極) |
供電電壓:3.3V / 5V
連接方式:PH2.0端子線
安裝方式:螺絲固定
4、電路板尺寸

5、Arduino IDE示範程序
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
Arduino IDE 庁件文件下載及導入教範:點擊查看
示範程序(UNO開發板):
volatile int csb;
float checkdistance_A0_A1() {
digitalWrite(A0, LOW);
delayMicroseconds(2);
digitalWrite(A0, HIGH);
delayMicroseconds(10);
digitalWrite(A0, LOW);
float distance = pulseIn(A1, HIGH) / 58.00;
delay(10);
return distance;
}
void setup(){
Serial.begin(9600);
csb = 0;
pinMode(A0, OUTPUT);
pinMode(A1, INPUT);
}
void loop(){
delay(200);
csb = checkdistance_A0_A1();
Serial.println(csb);
}6、ESP32 Python 示例(適用於Mixly IDE /米思齊)
開發板選擇 Python ESP32 【ESP32 Generic(4MB)】切換為代碼模式上傳
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE ESP32庫檔案下載及匯入教學:點擊查看
示例程式(ESP32-Python):
import machine
import sonar
import time
while True:
print(sonar.Sonar(16,17).checkdist())
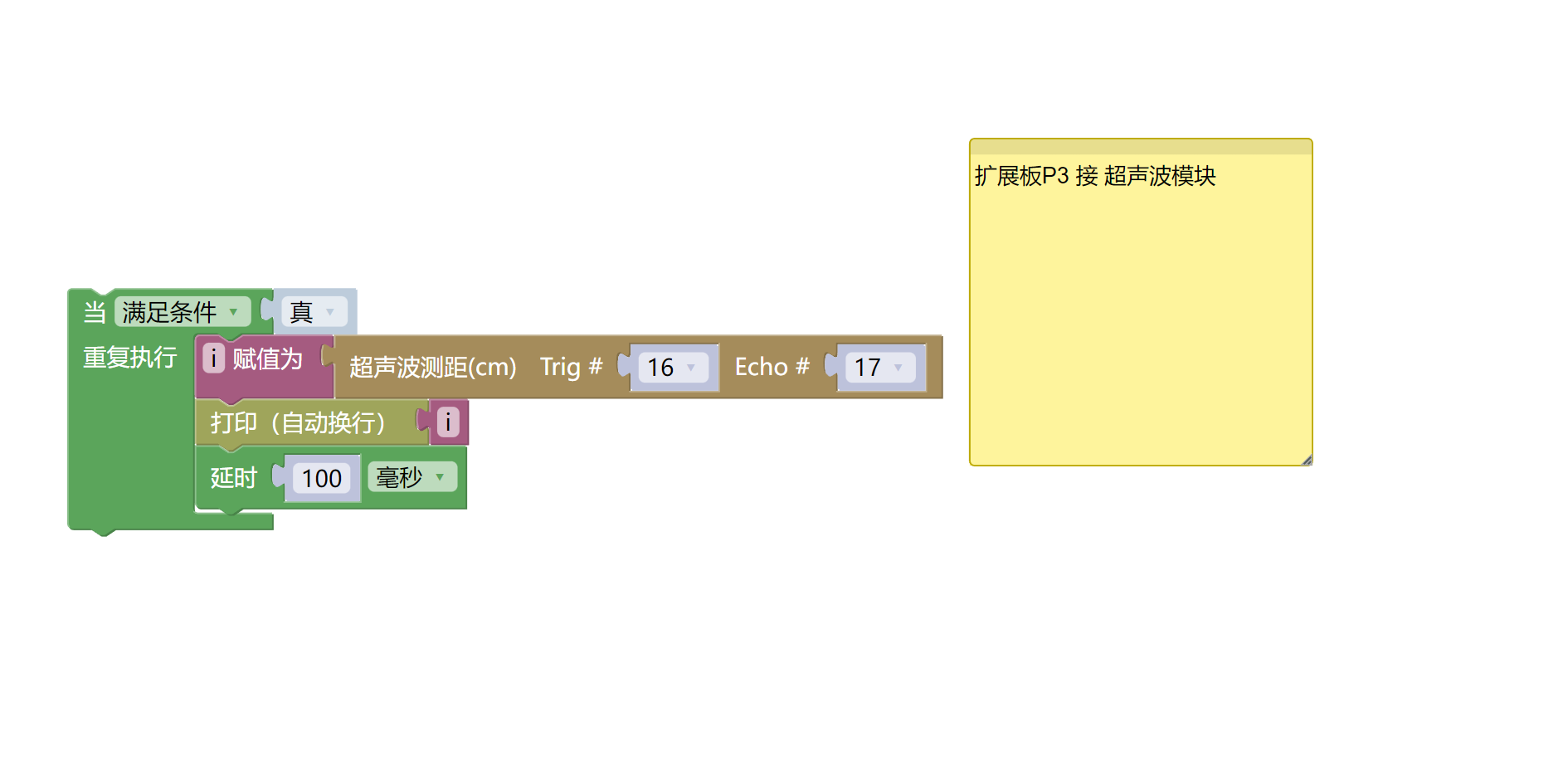
time.sleep_ms(200)7、米思齊 Mixly 示例程式(圖形化語言)
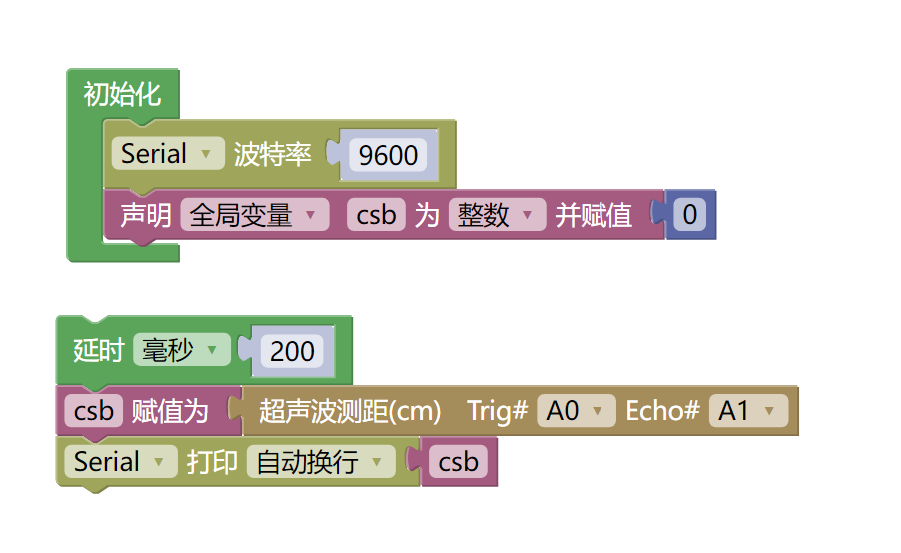
示範程序(UNO開發板):點擊下載
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE Arduino 圖庫檔案下載及匯入教學:點擊查看
示範程序(ESP32開發板):點擊下載
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE ESP32庫檔案下載及匯入教學:點擊查看
8、測試環境搭建
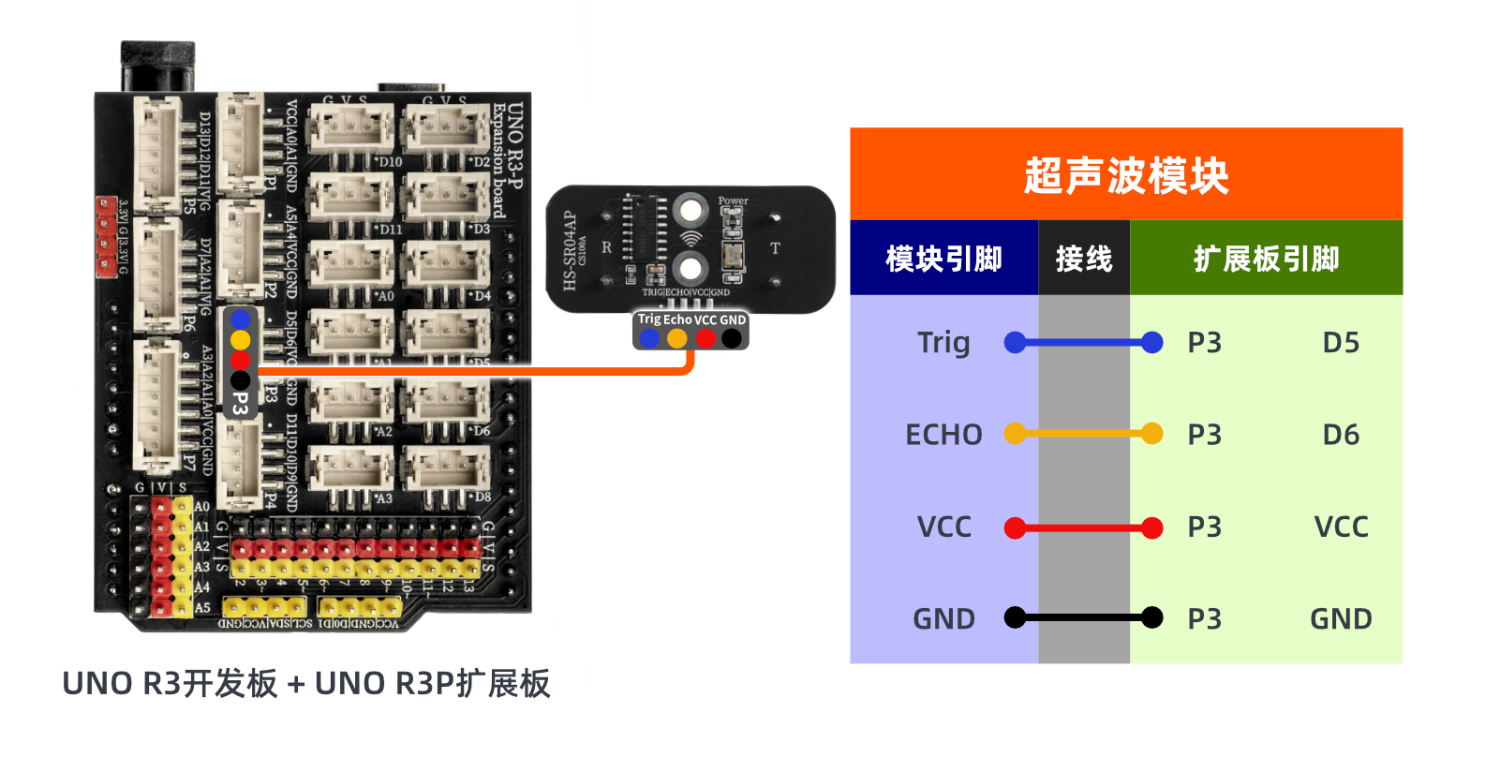
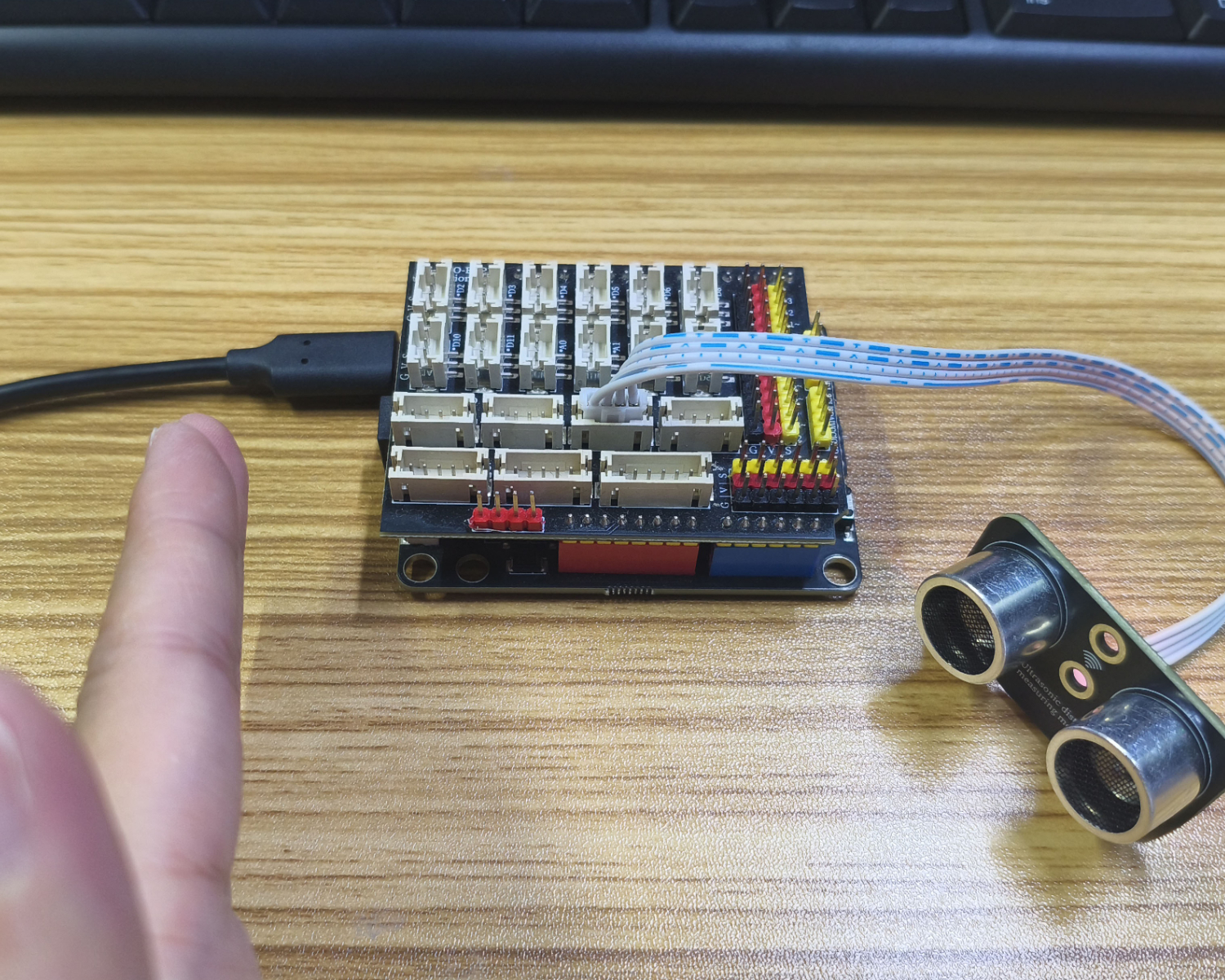
Arduino UNO 測試環境搭建
準備配件:
HELLO STEM UNO R3 開發板 *1
HELLO STEM UNO R3 P 扩展板 *1
USB type-c 資料線 *1
超聲波模組(HS-SR04AP)*1
PH2.0 4P雙頭端子線 *1
電路接線圖:
ESP32 測試環境搭建
準備配件:等更新...
電路接線圖:等更新...
9、視頻教學
Arduino UNO 觀看教程:點擊查看
ESP32 Python視頻教學:點擊查看
10、測試結果
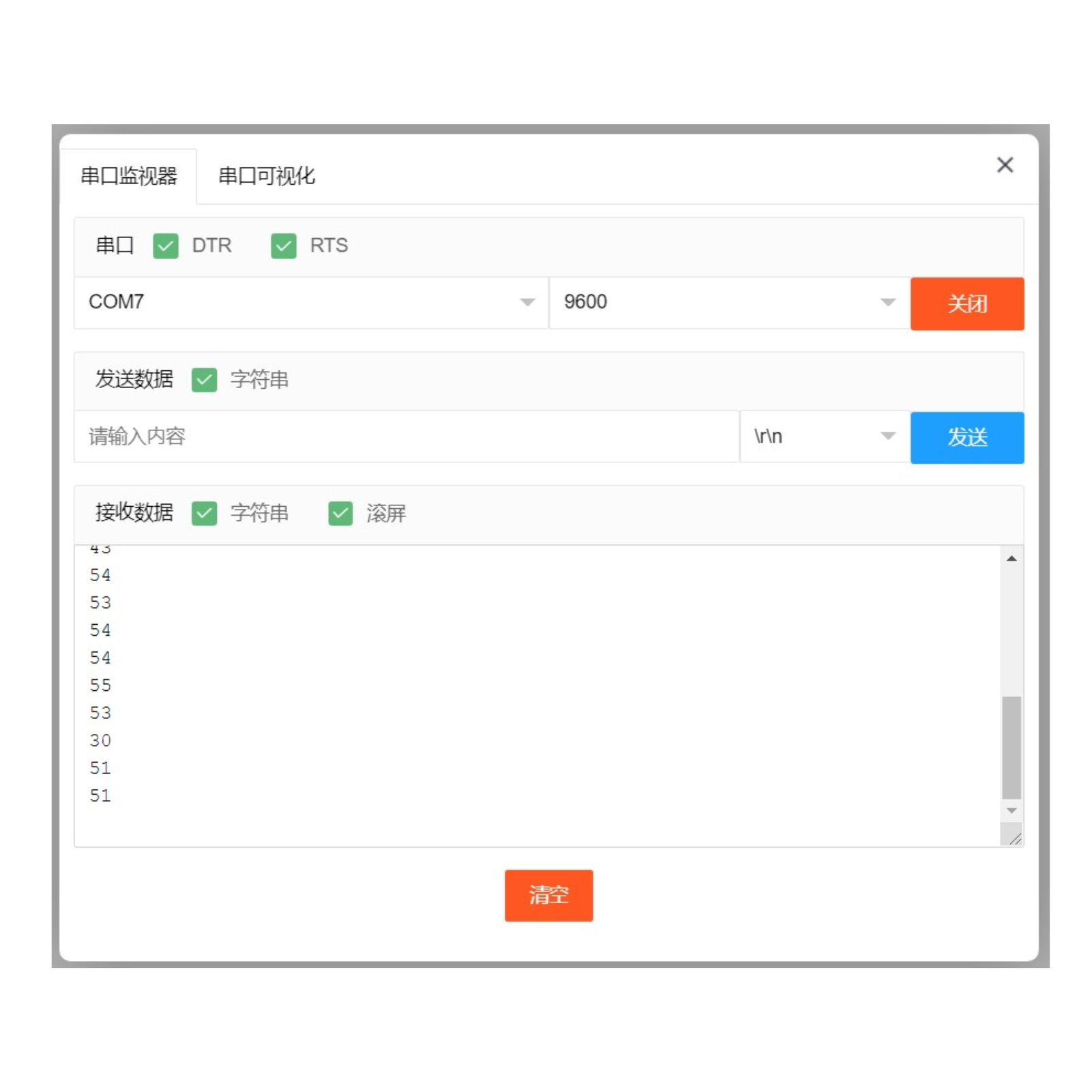
Arduino UNO測試結果:
將器件連接好線之後,將上述程序燒錄到 Arduino UNO 開發板之後,打開串口監視器,波特率設置為 9600。我們把障礙物置於超聲波模塊前方,可以測出超聲波模塊與障礙物之間的距離(cm)。更換超聲波模組與障礙物之間的距離,您會發現串口顯示的距離值發生了變化。
ESP32 Python測試結果: