

1、介紹
發射原理:非接觸性IC卡與讀卡器之間通過無線電波來完成讀寫操作。二者之間的通訊頻率為13.56MHZ。非接觸性IC卡本體是無源卡,當讀寫器對卡進行讀寫操作時,讀寫器發出的信號由兩部分叠加組成:一部分是電源信號,該信號由卡接收後,與本身的L/C產生一個瞬間能量來供給晶片工作。另一部分則是指令和數據信號,指揮芯片完成數據的讀取、修改、儲存等,並返回信號給讀寫器,完成一次讀寫操作。讀寫器則一般由單片機,專用智能模塊和天線組成,並配有與PC的通訊接口,印表口,I/O口等,以便應用於不同的領域。
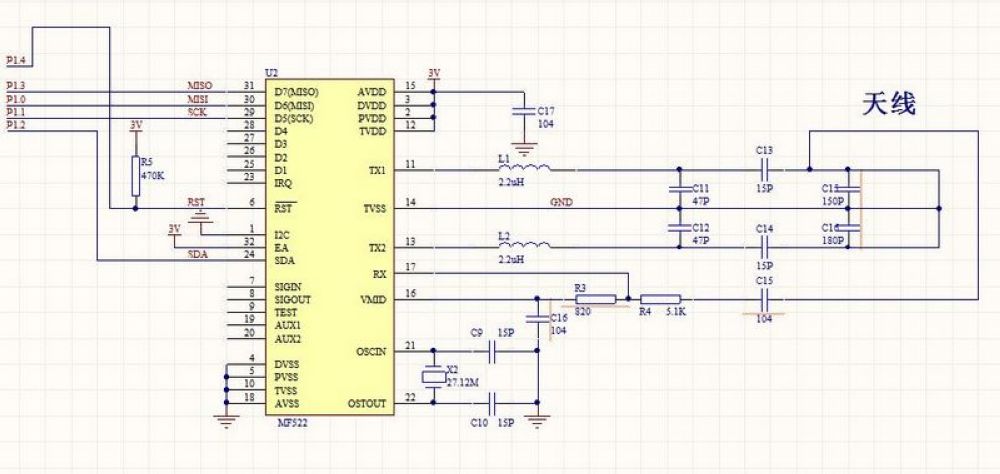
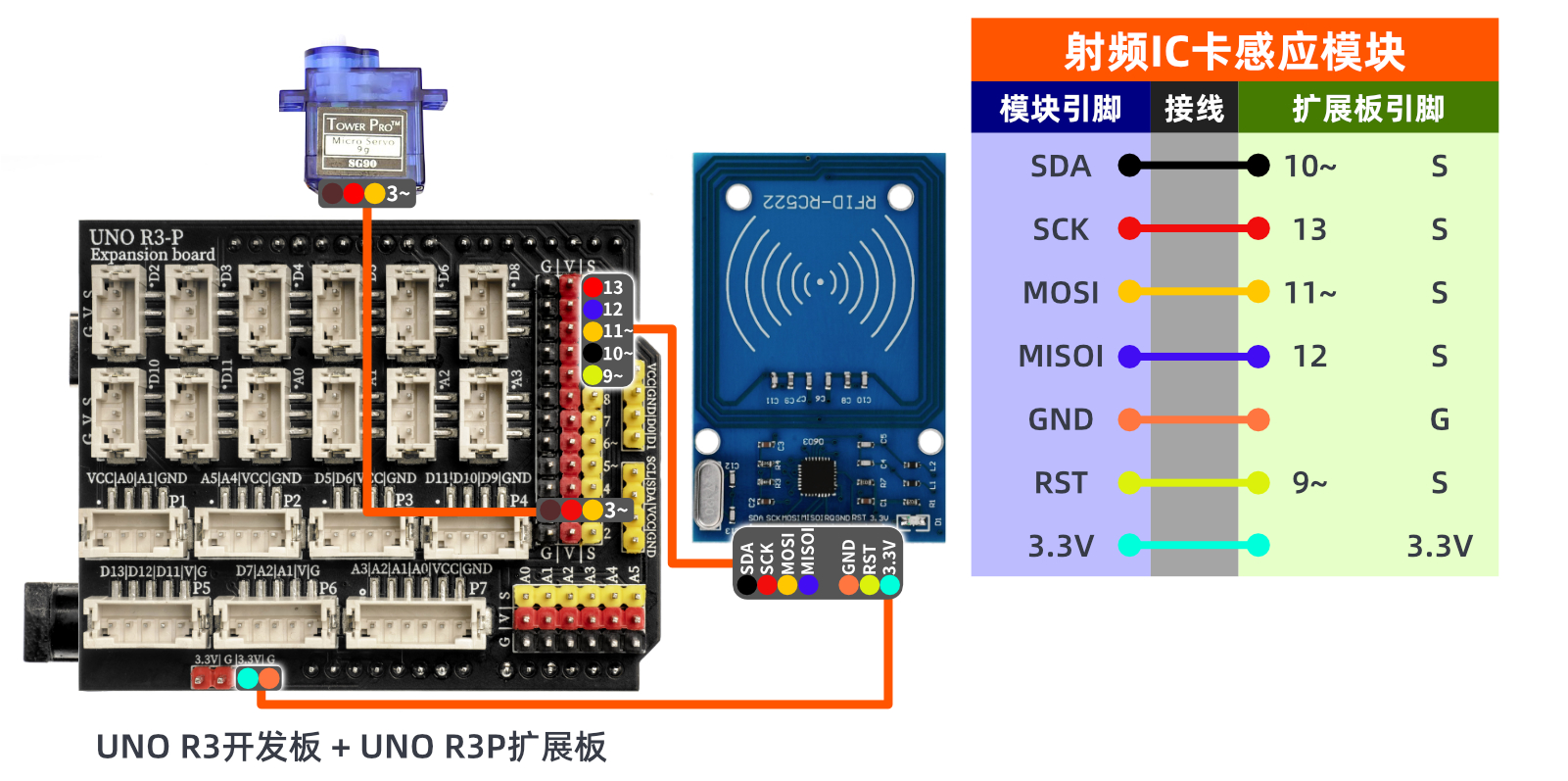
2、原理圖
3、模組參數
引腳名稱 | 描述 |
|---|---|
SDA | 串行數據線 |
SCK | 連接MCU的SCK信號 |
MOSI | MCU輸出,RC522接收 |
IRQ | 中斷請求輸出 |
GND | 接地 |
PST | 復位 |
3.3V | 工作電壓 |
供電電壓:3.3V
連接方式:2.54mm排釘
安裝方式:螺絲固定
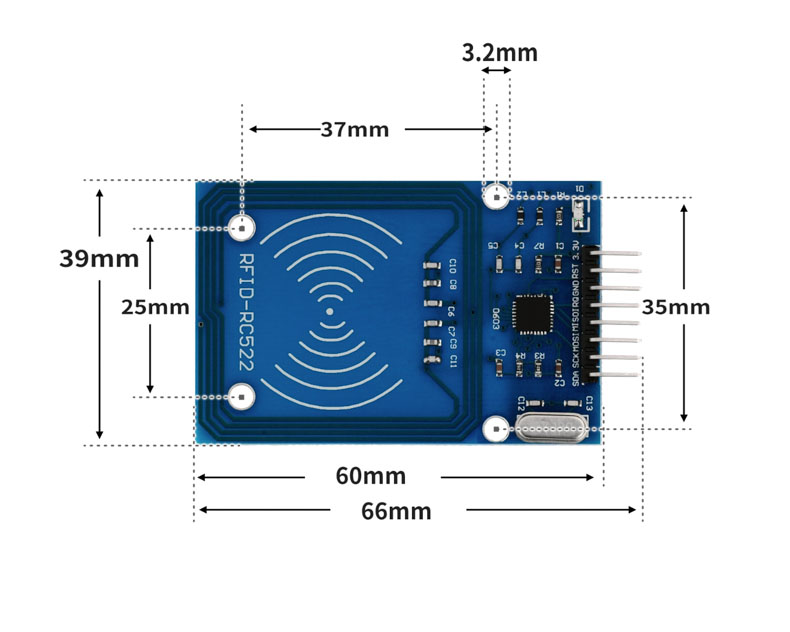
4、電路板尺寸
5、Arduino IDE示範程序
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
Arduino IDE 庁件文件下載及導入教範:點擊查看
示範程序(UNO開發板):
#include <SPI.h>
#include <MFRC522.h>
#include <Servo.h>
String card[]={"83a08a34","83db1c13"};
String name[]={"YOU","I"};
MFRC522 rfid(10, 9);
String RFID_CardUID;
Servo servo_3;
String MFRC522_ReadCardUID(MFRC522 *_name){
String _CardUID = "";
for (byte _i = 0; _i < _name->uid.size; _i++){
if(_name->uid.uidByte[_i] < 0x10)
_CardUID += "0";
_CardUID += String(_name->uid.uidByte[_i], HEX);
}
return _CardUID;
}
boolean MFRC522_IsNewCard(MFRC522 *_name){
if(!_name->PICC_IsNewCardPresent())
return false;
if(!_name->PICC_ReadCardSerial())
return false;
return true;
}
void setup(){
Serial.begin(9600);
SPI.begin();
rfid.PCD_Init();
RFID_CardUID = "";
servo_3.attach(3);
Serial.println("读取RFID卡号测试");
servo_3.write(90);
delay(10);
}
void loop(){
if(MFRC522_IsNewCard(&rfid)){
RFID_CardUID = MFRC522_ReadCardUID(&rfid);
Serial.println(String("Card UID:") + String(RFID_CardUID));
for (int i = (0); i <= (sizeof(card)/sizeof(card[0])); i = i + (1)) {
if (RFID_CardUID == card[i]) {
Serial.println(name[i]);
servo_3.write(179);
delay(2000);
}
servo_3.write(90);
delay(10);
}
rfid.PICC_HaltA();
rfid.PCD_StopCrypto1();
}
delay(10);
}6、ESP32 Python 示例(適用於Mixly IDE /米思齊)
開發板選擇 Python ESP32 【ESP32 Generic(4MB)】切換為代碼模式上傳
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE ESP32庫檔案下載及匯入教學:點擊查看
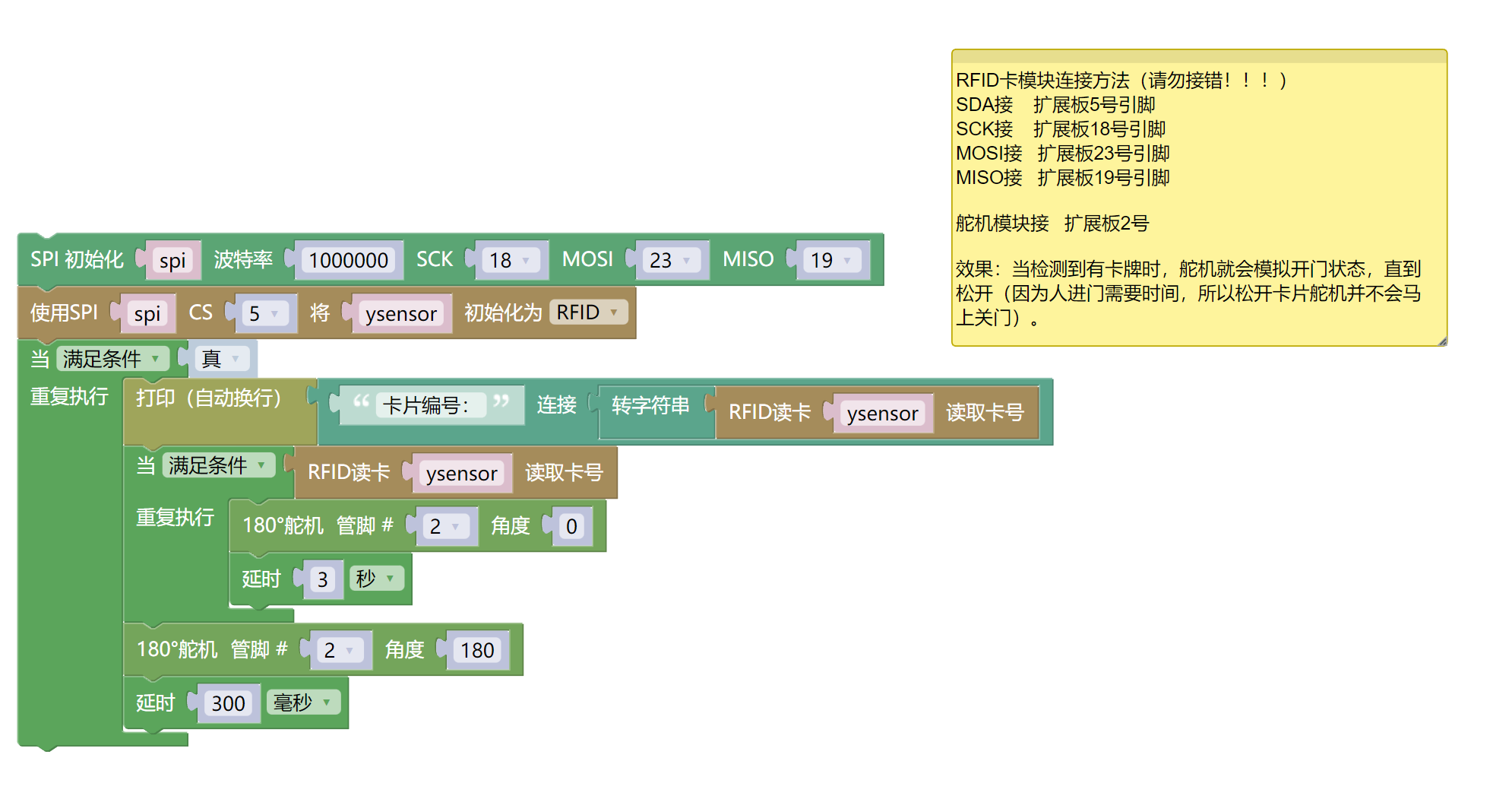
示例程式(ESP32-Python):
import machine
import rc522
import servo
import time
spi = machine.SoftSPI(baudrate=1000000, sck=machine.Pin(18), mosi=machine.Pin(23), miso=machine.Pin(19))
ysensor = rc522.RC522(spi,5)
while True:
print(('卡片编号:' + str(ysensor.read_card(0, x="id"))))
while ysensor.read_card(0, x="id"):
servo.servo180_angle(2,0)
time.sleep(3)
servo.servo180_angle(2,180)
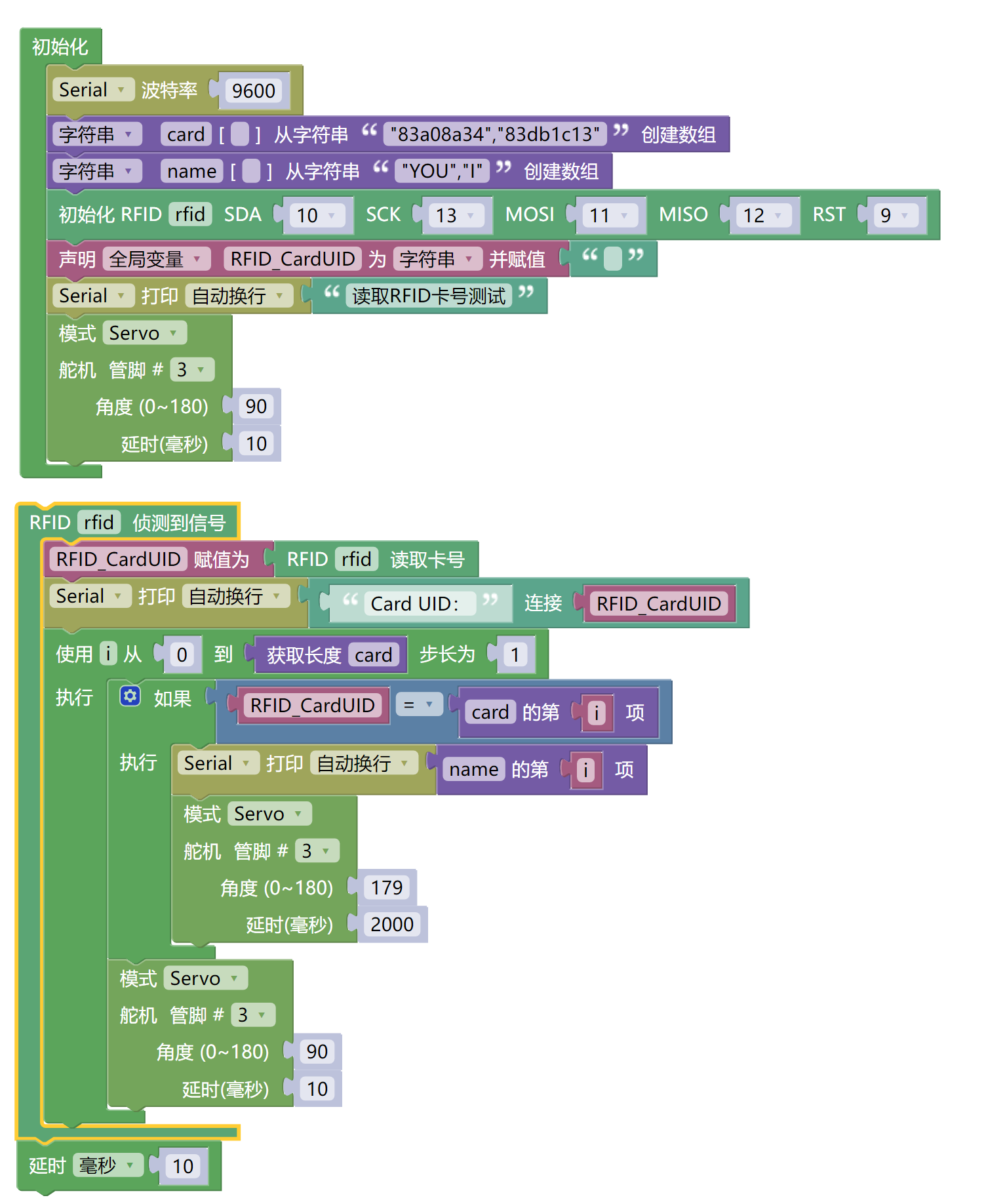
time.sleep_ms(300)7、米思齊 Mixly 示例程式(圖形化語言)
示範程序(UNO開發板):點擊下載
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE Arduino 圖庫檔案下載及匯入教學:點擊查看
示範程序(ESP32開發板):點擊下載
注意:程式上傳時如果提示庫文件報錯,請先導入庫文件!
米思齊(Mixly)IDE ESP32庫檔案下載及匯入教學:點擊查看
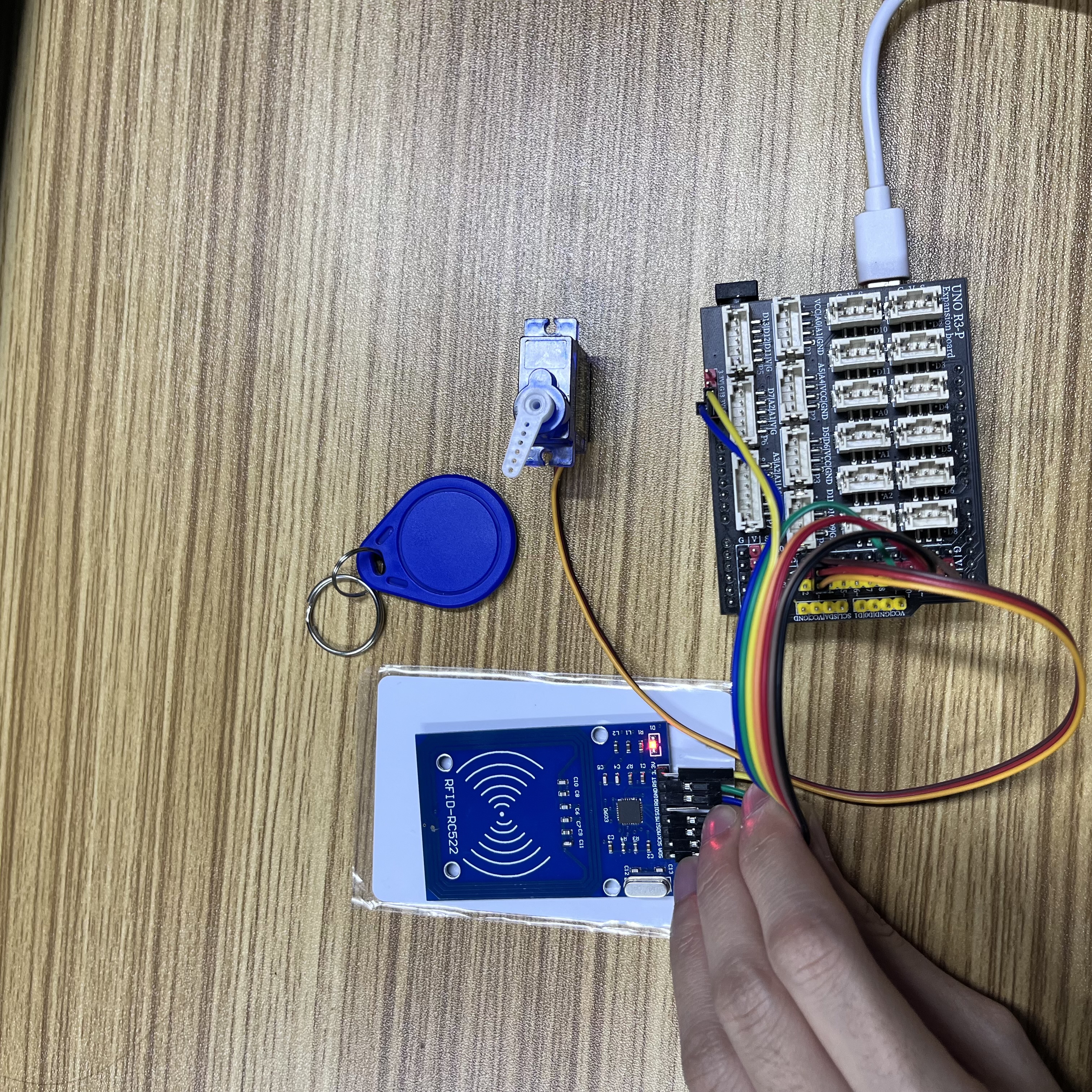
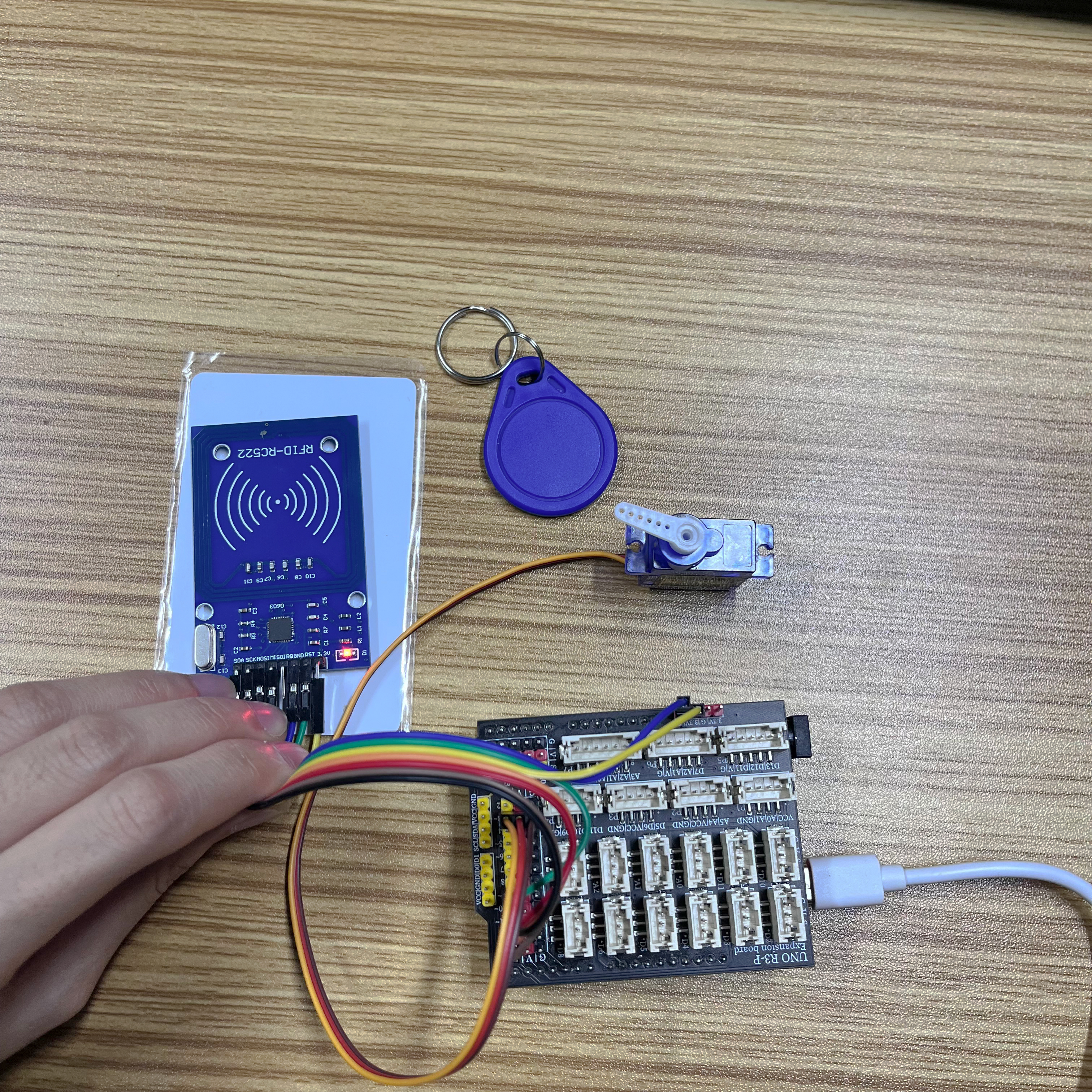
8、測試環境搭建
Arduino UNO 測試環境搭建
準備配件:
UNO-R3 開發板*1
UNO-R3 P 扩展板
USB type-c 資料線 *1
RFID-RC522射頻IC卡感應模塊*1
空白卡*1
異形卡*1
9g舵機*1
1P母對母杜邦線 *7條 或 7P母對母杜邦線 *1條
電路接線圖:
ESP32 測試環境搭建
準備配件:等更新...
電路接線圖:等更新...
9、視頻教學
視頻教學:點擊查看
10、測試結果
Arduino UNO 混试结果:
將設備連接好線之後,將上述程序燒錄到 Arduino UNO 開發板之後,刷卡後舵機會旋轉模擬開門和關門。
ESP32 測試結果:
等更新...