

1、介紹
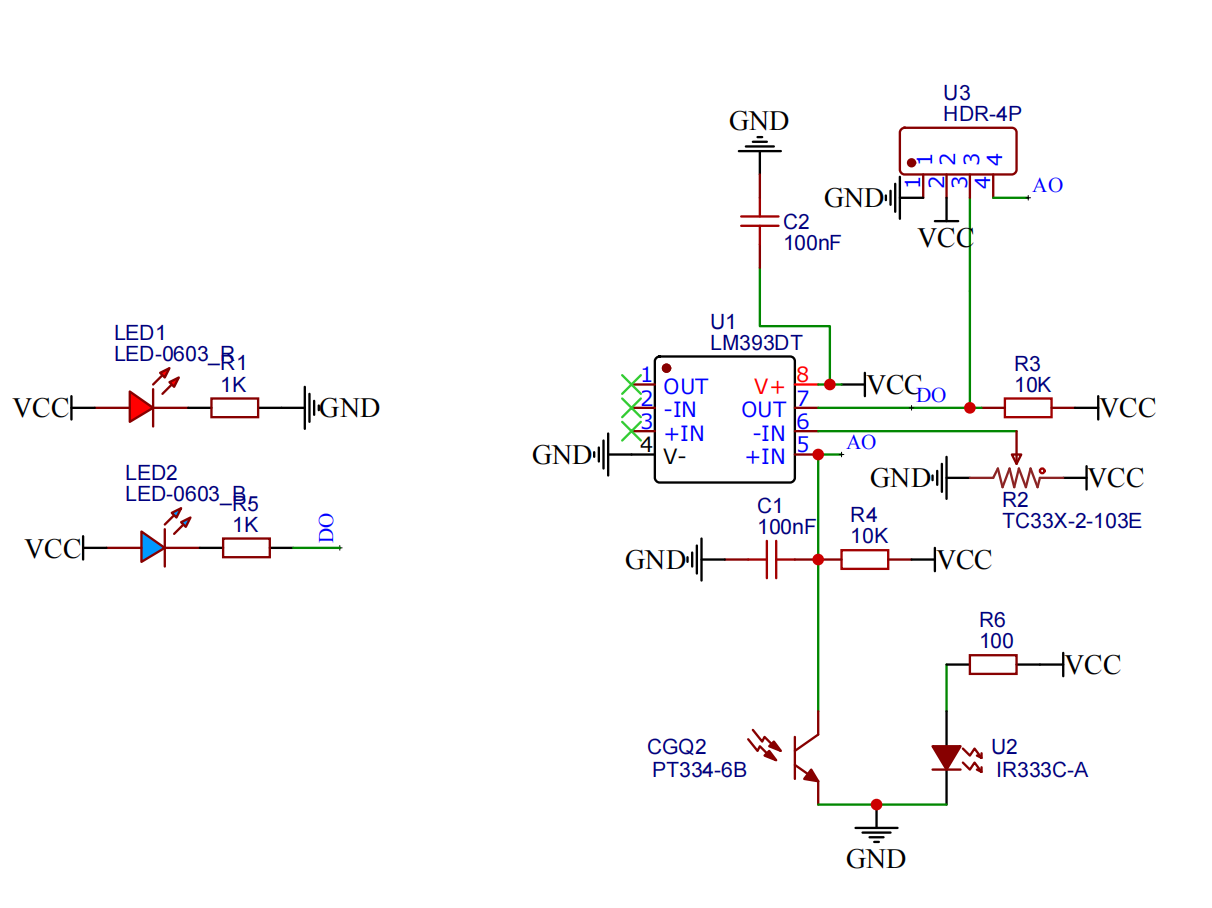
2、原理圖
3、模組參數
引腳名稱 | 描述 |
|---|---|
G | GND(電源輸入負極) |
V | VCC(電源輸入正極) |
S | 信號引腳 |
D | 數字信號引腳 |
A | 模擬信號引腳 |
供電電壓:3.3V / 5V
連接方式:PH2.0端子線
安裝方式:雙螺絲固定
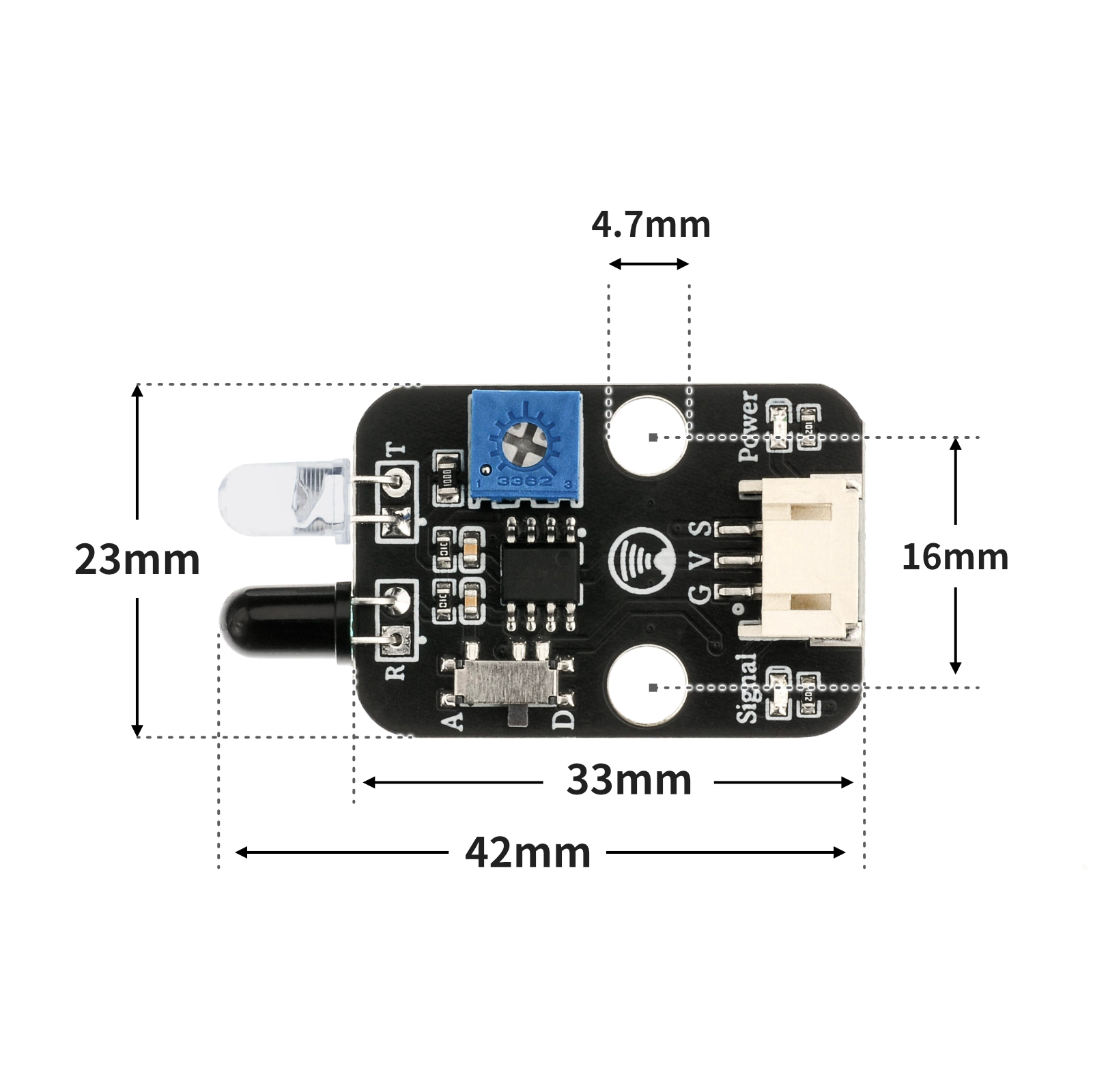
4、電路板尺寸
5、Arduino IDE示範程序
Arduino UNO 示例(適用於Mixly IDE、Arduino IDE):
void setup(){
pinMode(4, INPUT);//设置D4为输入模式
pinMode(6, OUTPUT);//设置D6为输出模式
}
void loop(){
//红外避障模块s引脚接uno开发板D4引脚,A引脚空置;led灯接D6引脚;
if (digitalRead(4) == 0) {//检测到障碍物,输出低电平
digitalWrite(6,HIGH);//亮灯
} else if (digitalRead(4) == 1) {//未检测到障碍物,输出高电平
digitalWrite(6,LOW);//熄灭
}
}ESP32 Python 示例(適用於Mixly IDE /米思齊)
(開發板選擇 Python ESP32 【ESP32 Generic(4MB)】切換為代碼模式上傳 ):
import machine
import time
pin2 = machine.Pin(2, machine.Pin.IN)
pin4 = machine.Pin(4, machine.Pin.OUT)
while True:
if pin2.value() == 0:
pin4.value(1)
time.sleep(1)
else:
pin4.value(0)
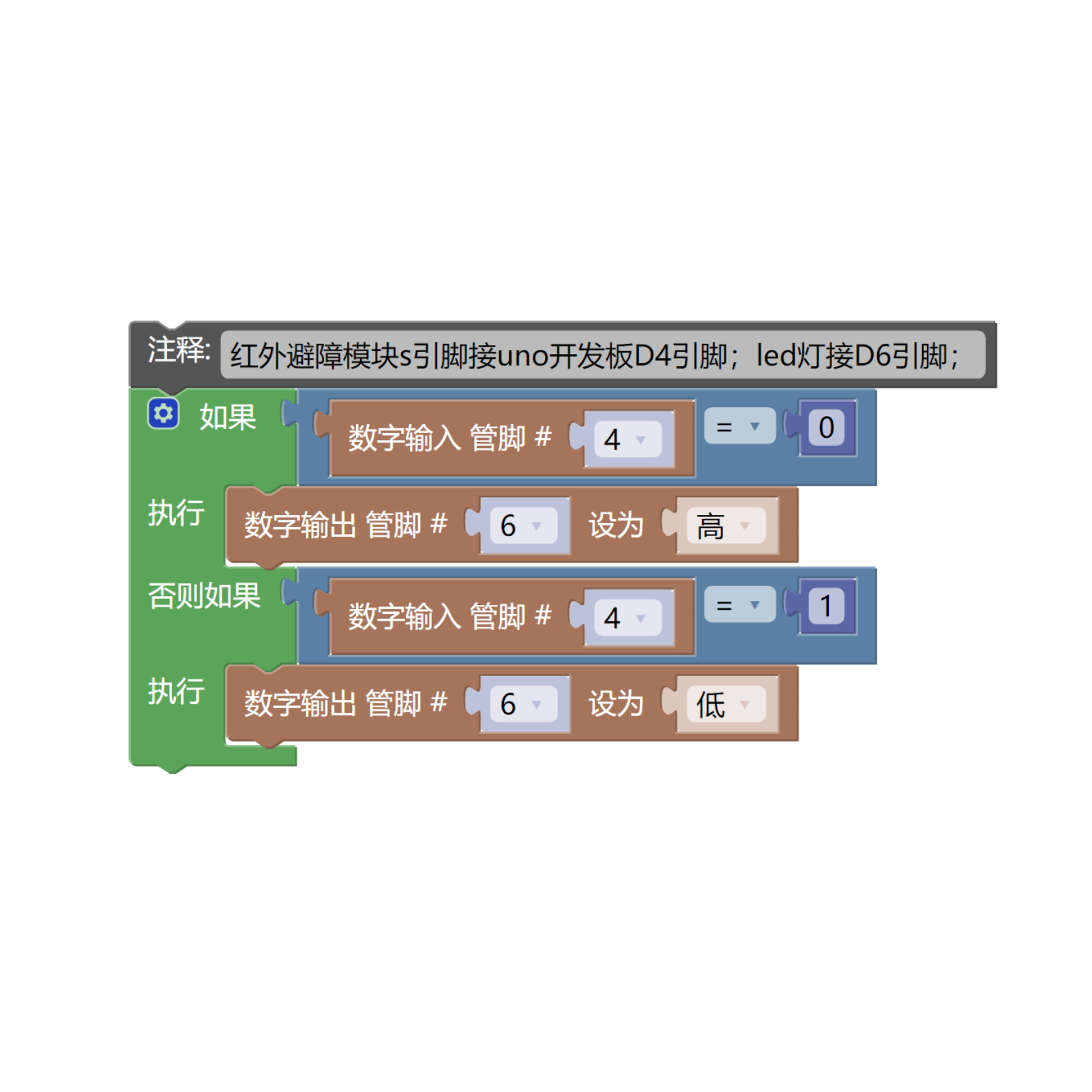
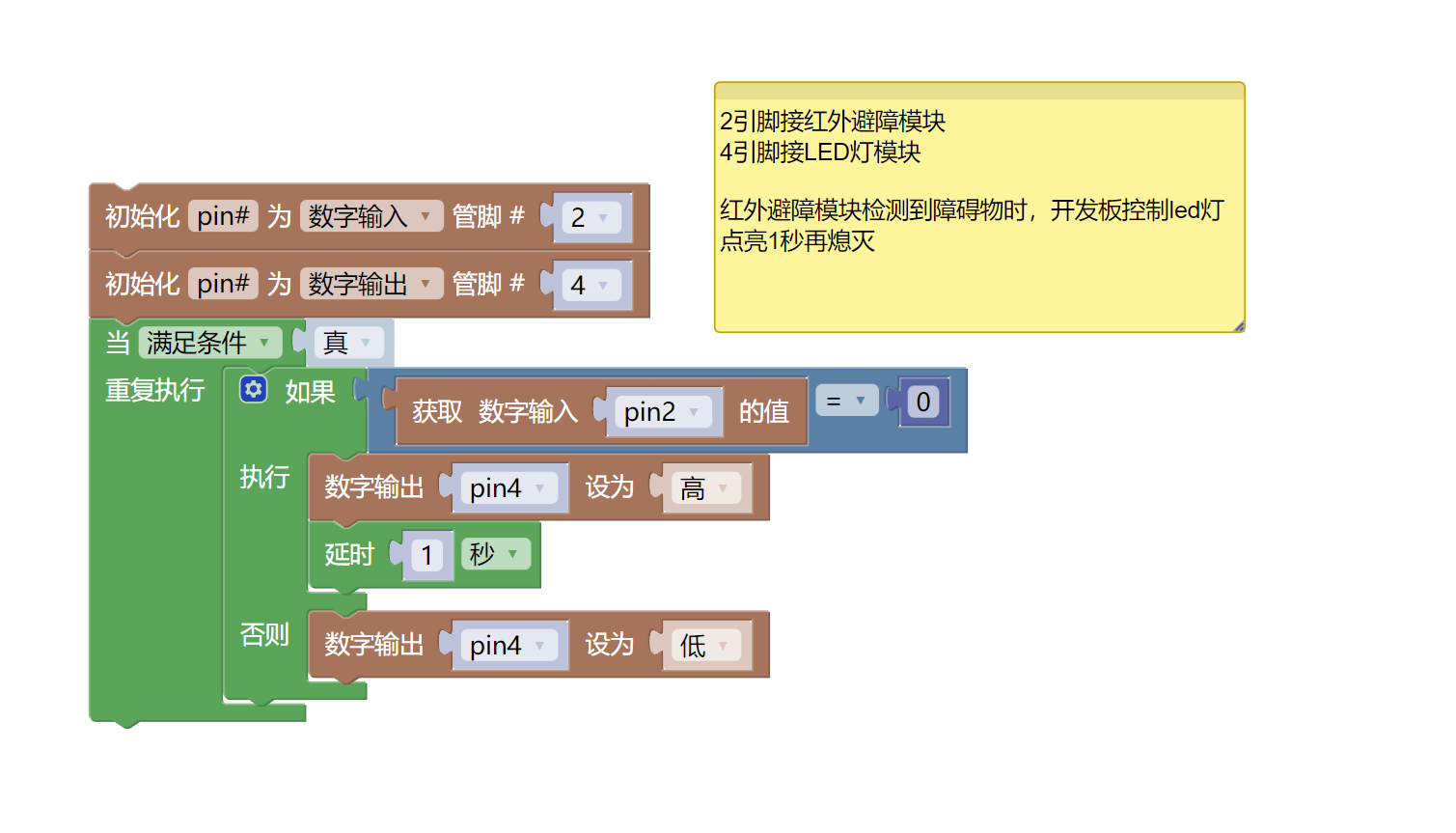
6、米思齊Mixly示例程式(圖形化語言)
ArduinoUNO圖形化示例程式:點擊下載
ESP32 Python圖形化示例程式:點擊下載
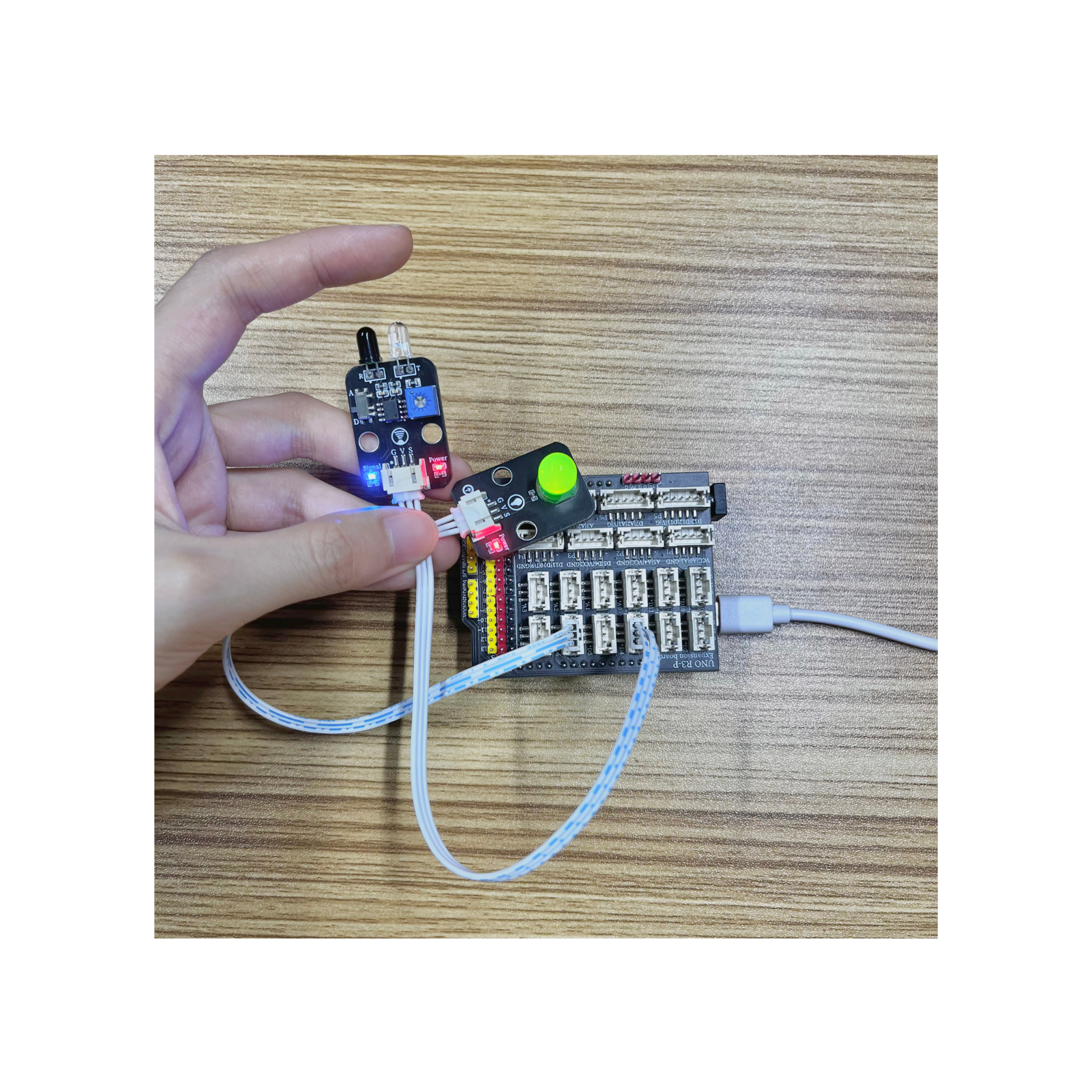
7、測試環境搭建
Arduino UNO 測試環境搭建
準備配件:
HELLO STEM UNO R3 開發板 *1
HELLO STEM UNO R3 P 扩展板 *1
USB type-c 資料線 *1
LED燈模塊(HS-F08L)*1
紅外避障模組(HS-S02L)*1
PH2.0 3P雙頭端子線 *2
電路接線圖:
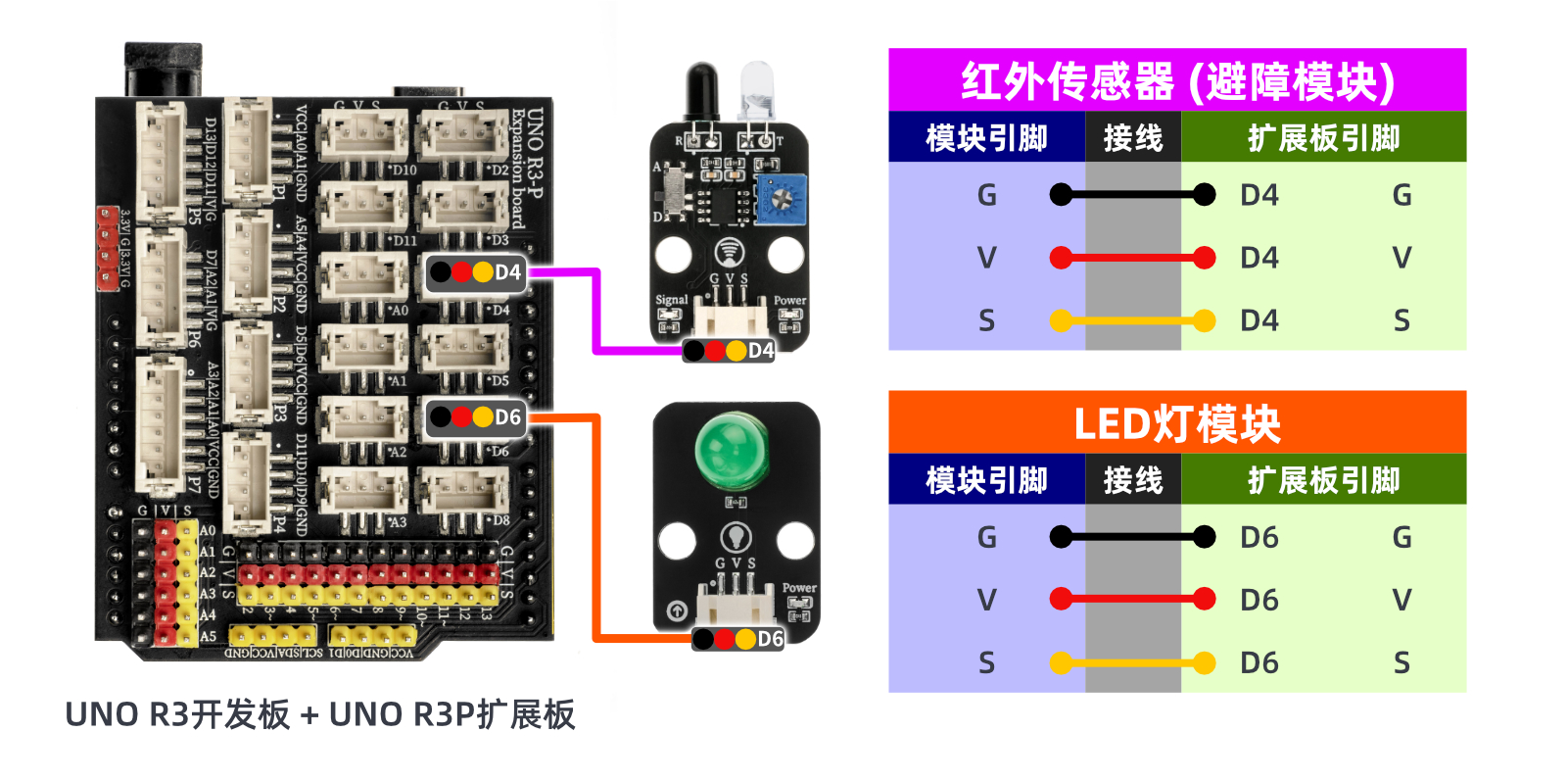
ESP32 Python 測試環境搭建
8、視頻教學
Arduino UNO視頻教學:點擊查看
ESP32 Python視頻教學:
9、測試結論
Arduino UNO測試結論:
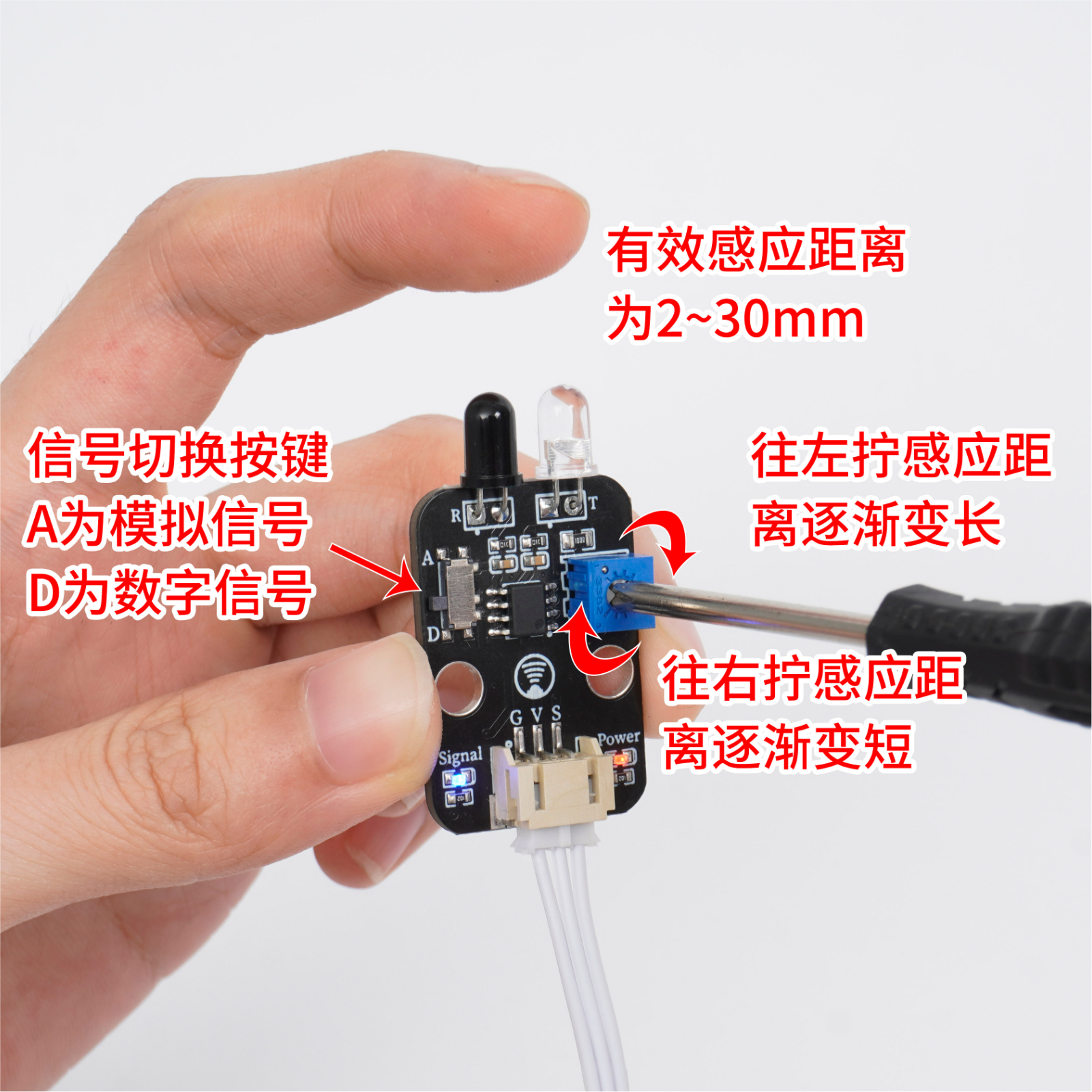
模組調試:在紅外避障模組通电的狀況下,用小螺丝釘調節紅外避障模組的電位器,使手指離紅外避障探头20mm左右,感應器信號指示藍燈亮,手指離探头20mm外紅外避障模組信號指示藍燈滅。注意: 紅外避障模組的紅外發射和接收探头對受環境光干擾較大,請不要在陽光太強的環境下調試。
紅外避障模組利用紅外的工作特性, 当紅外避障模組探头檢測到障礙物輸出低電平(0);LED燈被點亮,當紅外避障模組探头未檢測到前方有障礙物輸出高電平(1),LED燈處於熄滅狀態。
ESP32 Python測試結論:
模組調試:在紅外避障模組通电的狀況下,用小螺丝釘調節紅外避障模組的電位器,使手指離紅外避障探头20mm左右,感應器信號指示藍燈亮,手指離探头20mm外紅外避障模組信號指示藍燈滅。注意: 紅外避障模組的紅外發射和接收探头對受環境光干擾較大,請不要在陽光太強的環境下調試。
紅外避障模組利用紅外的工作特性, 当紅外避障模組探头檢測到障礙物輸出低電平(0);LED燈被點亮,當紅外避障模組探头未檢測到前方有障礙物輸出高電平(1),LED燈處於熄滅狀態。