

1、介绍
HS-SR04超声波模块是在传统的HC-SR04超声波模块基础上进行优化设计。功能尺寸大小完全兼容传统的HC-SR04模块,在细节上比传统的HC-SR04模块更优化了许多。本模块性能稳定,测度距离精确,模块高精度,盲区小。产品应用领域:机器人避障、物体测距、液位检测、公共安防、停车场等等····
2、原理图
3、模块参数
引脚名称 | 描述 |
|---|---|
TRIG | 控制端 |
ECHO | 接收端 |
VCC | VCC(电源输入正极) |
GND | GND(电源输入负极) |
供电电压:3.3V / 5V
连接方式:PH2.0端子线
安装方式:螺丝固定
4、电路板尺寸

5、Arduino IDE示例程序
注意:程序上传时如果提示库文件报错,请先导入库文件!
Arduino IDE 库文件下载及导入教程:点击查看
示例程序(UNO开发板):
volatile int csb;
float checkdistance_A0_A1() {
digitalWrite(A0, LOW);
delayMicroseconds(2);
digitalWrite(A0, HIGH);
delayMicroseconds(10);
digitalWrite(A0, LOW);
float distance = pulseIn(A1, HIGH) / 58.00;
delay(10);
return distance;
}
void setup(){
Serial.begin(9600);
csb = 0;
pinMode(A0, OUTPUT);
pinMode(A1, INPUT);
}
void loop(){
delay(200);
csb = checkdistance_A0_A1();
Serial.println(csb);
}6、ESP32 Python 示例(适用于Mixly IDE /米思齐)
开发板选择 Python ESP32 【ESP32 Generic(4MB)】切换为代码模式上传
注意:程序上传时如果提示库文件报错,请先导入库文件!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:点击查看
示例程序(ESP32-Python):
import machine
import sonar
import time
while True:
print(sonar.Sonar(16,17).checkdist())
time.sleep_ms(200)7、米思齐 Mixly 示例程序(图形化语言)
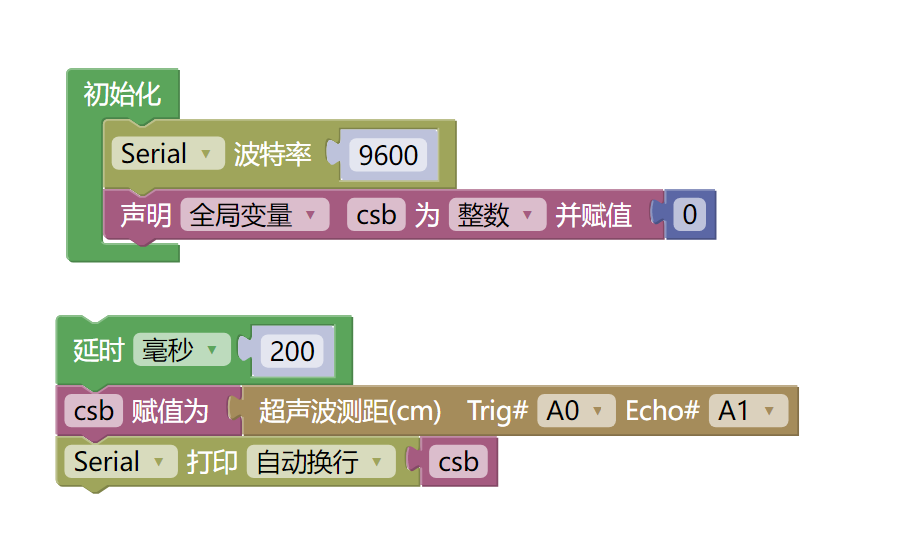
示例程序(UNO开发板):点击下载
注意:程序上传时如果提示库文件报错,请先导入库文件!
米思齐(Mixly)IDE Arduino库文件下载及导入教程:点击查看
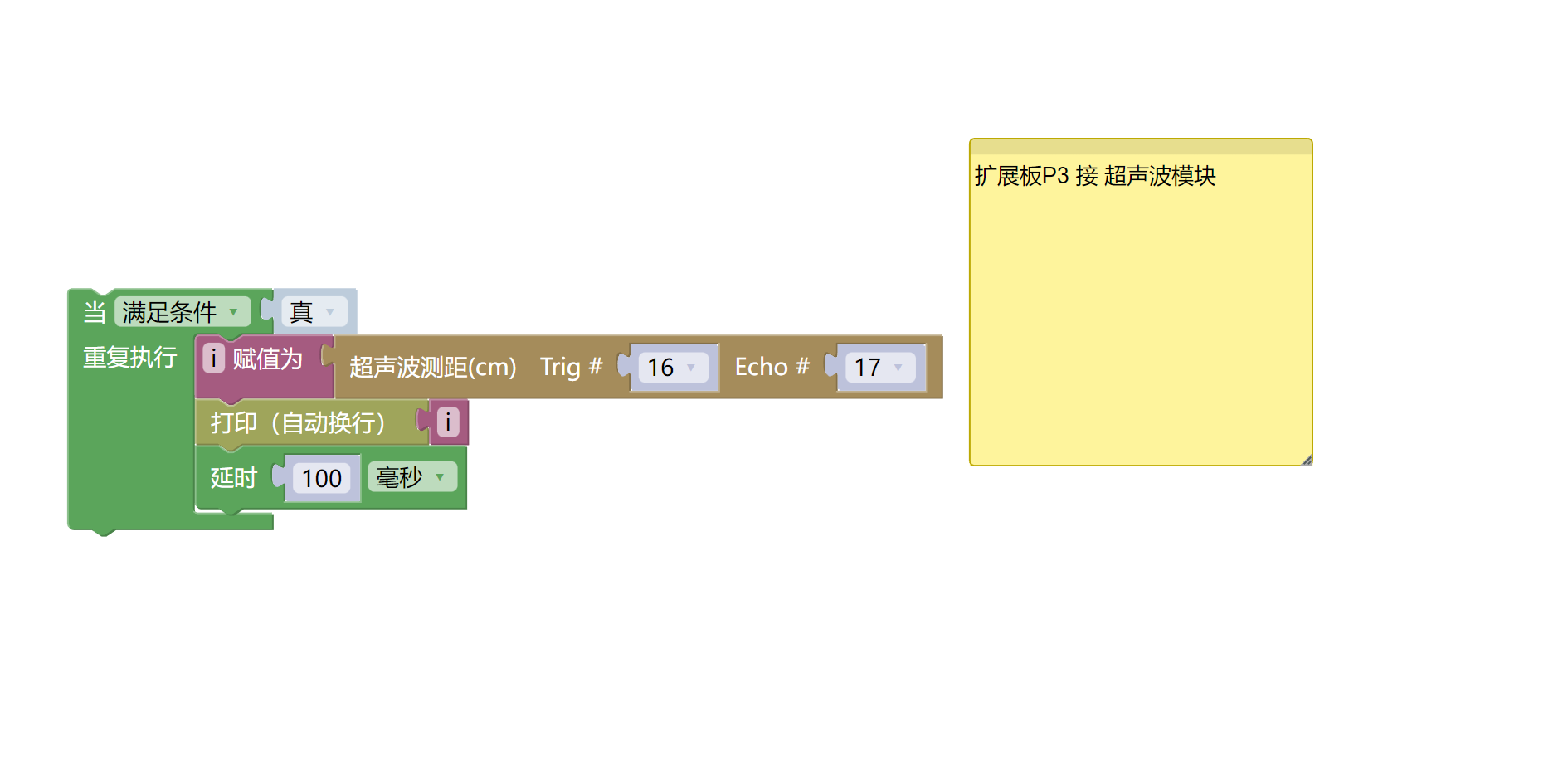
示例程序(ESP32开发板):点击下载
注意:程序上传时如果提示库文件报错,请先导入库文件!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:点击查看
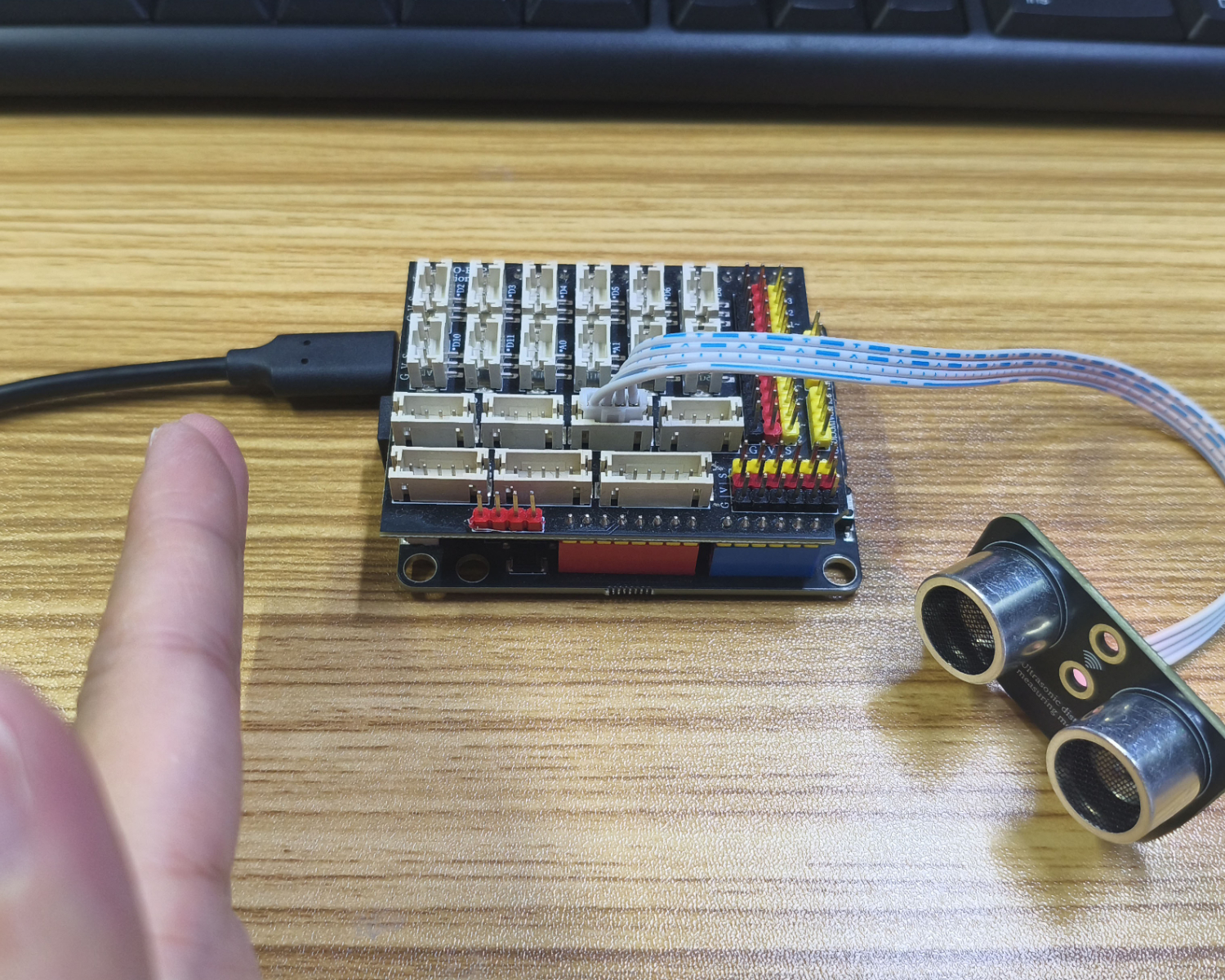
8、测试环境搭建
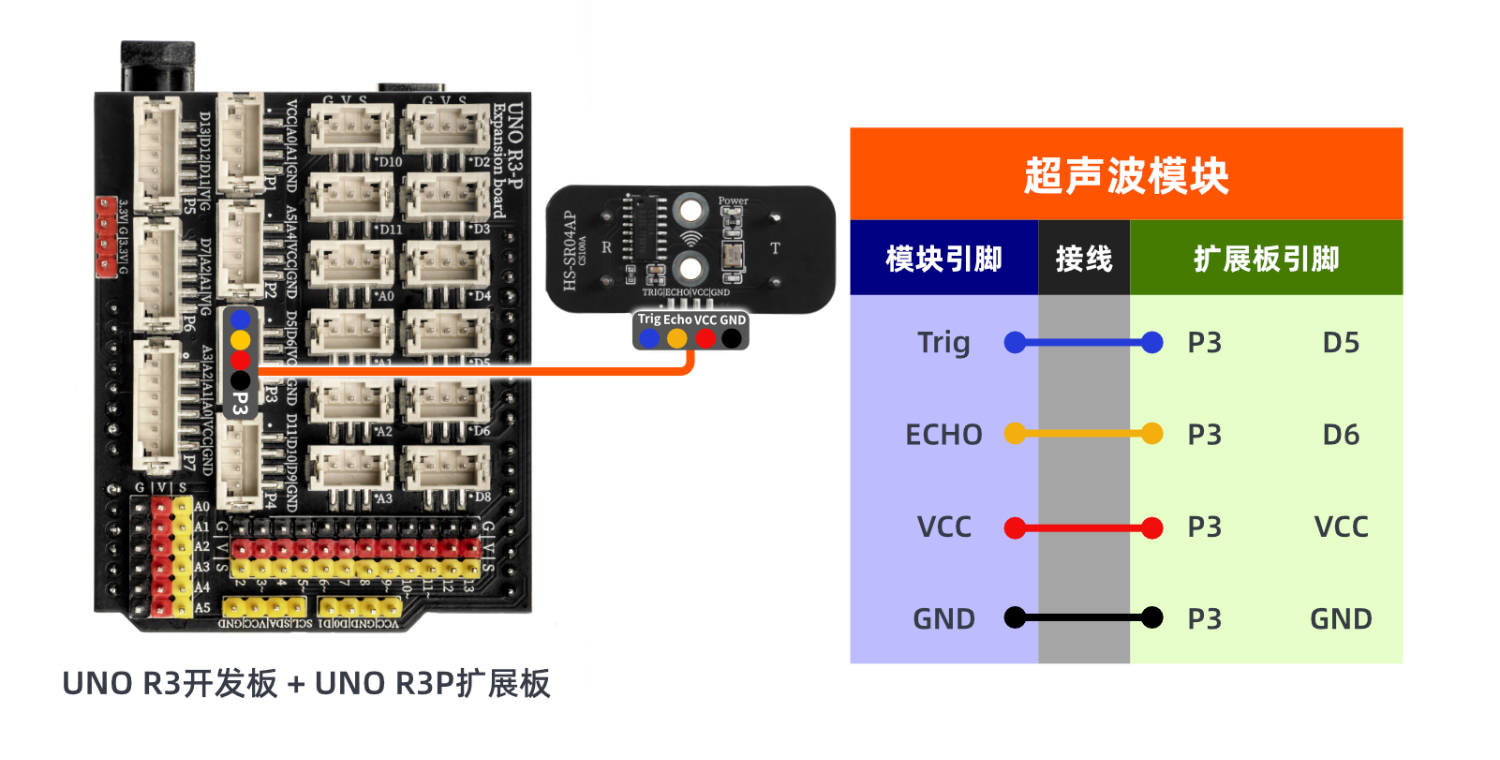
Arduino UNO 测试环境搭建
准备配件:
HELLO STEM UNO R3 开发板 *1
HELLO STEM UNO R3 P 扩展板 *1
USB type-c 数据线 *1
超声波模块(HS-SR04AP)*1
PH2.0 4P双头端子线 *1
电路接线图:
ESP32 测试环境搭建
准备配件:待更新...
电路接线图:待更新...
9、视频教程
Arduino UNO视频教程:点击查看
ESP32 Python视频教程:点击查看
10、测试结果
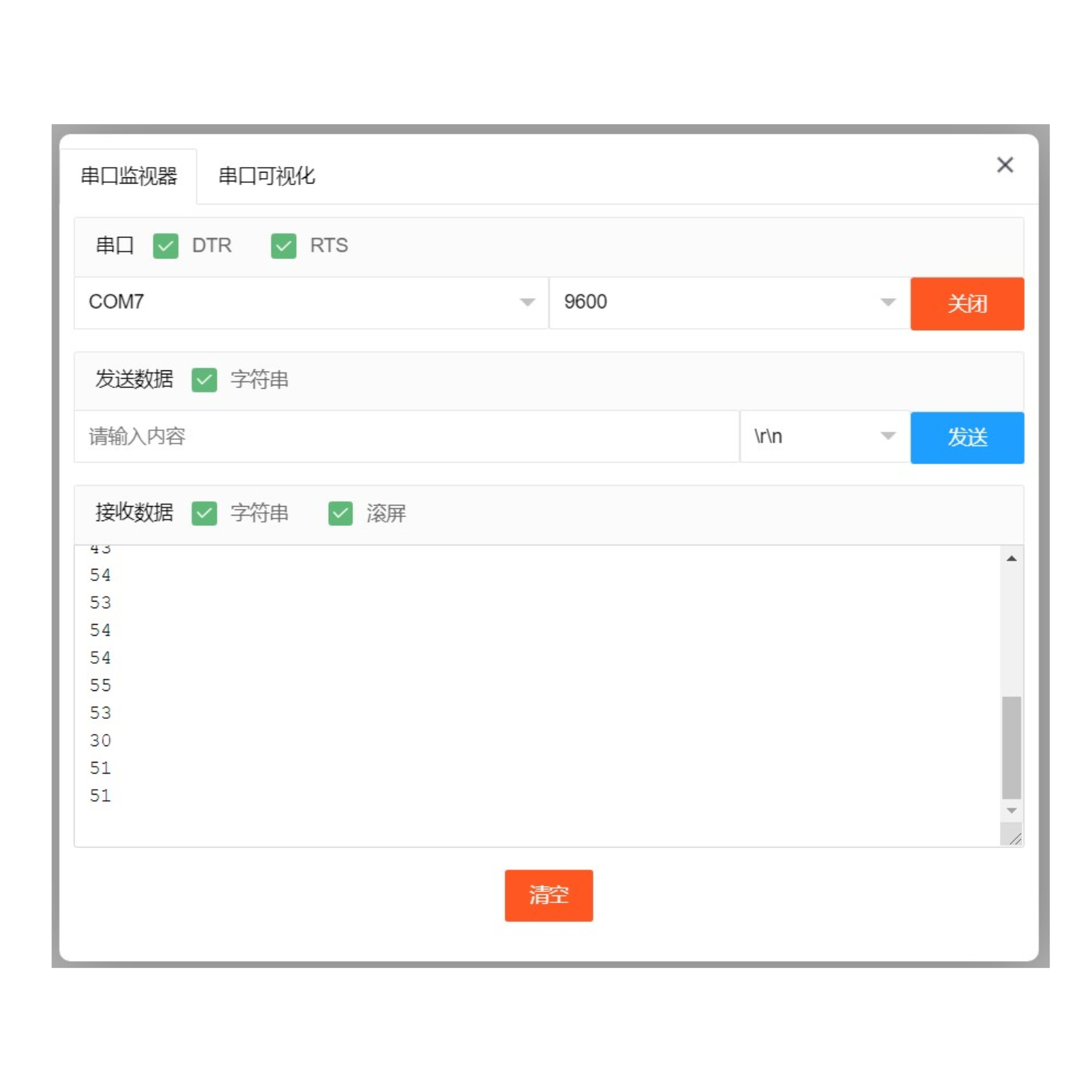
Arduino UNO测试结果:
将器件连接好线之后,将上述程序烧录到 Arduino UNO 开发板之后,打开串口监视器,波特率设置为 9600。我们把障碍物置于超声波模块前方,可以测出超声波模块与障碍物之间的距离(cm)。更改超声波模块与障碍物之间的距离,您会发现串口显示的距离值发生了变化。
ESP32 Python测试结果:
将器件连接好线之后,将上述程序烧录到 ESP32开发板之后,打开串口监视器,波特率设置为 9600。我们把障碍物置于超声波模块前方,可以测出超声波模块与障碍物之间的距离(cm)。更改超声波模块与障碍物之间的距离,您会发现串口显示的距离值发生了变化。