1、소개
电机 제어를 실현합니다: I2C 인터페이스를 통해 외부 마이크로컨트롤러와 연결되어, PCA9685 칩을 통해 PWM 신호를 출력하여, 네 개의 MOC PF 모터의 속도 등의 파라미터를 제어합니다。8PIN 인터페이스: 8개의 핀 인터페이스를 제공하여 센서, 다른 컨트롤러 또는 기능을 확장할 수 있으며, 시스템의 추가 확장 및 통합에 편리하다.
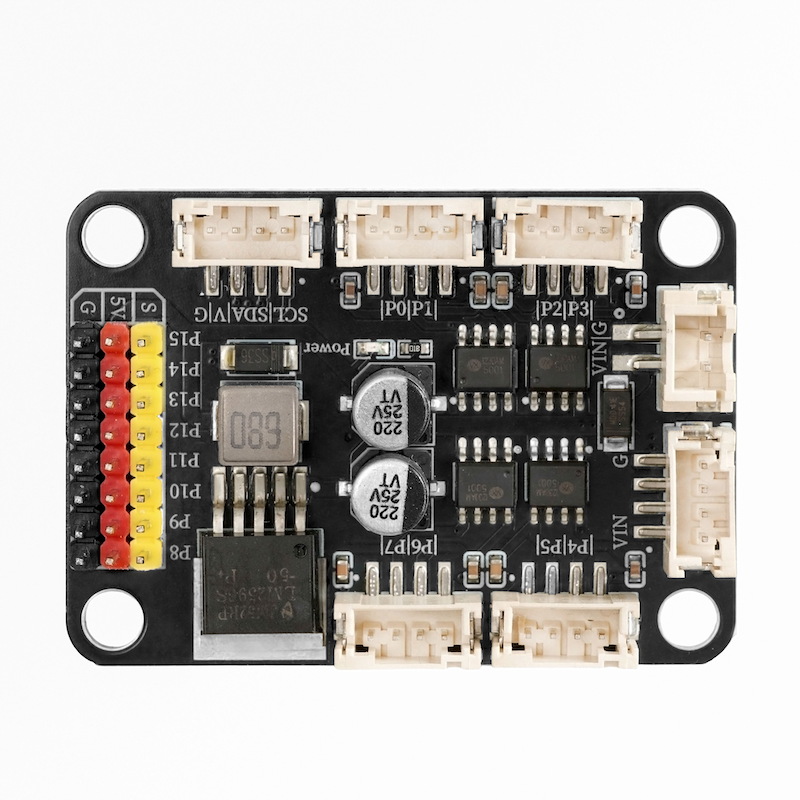
2、시뮬레이션 그래프
3、모듈 매개변수
핀 이름 | 설명 |
|---|---|
G | GND(전원 입력 부정极) |
V | VCC(전원 입력 정극) |
SDA | 데이터핀 |
SCL | 시계핀 |
전원 공급 전압: 3.3V-5V
연결 방식: PH2.0 4P 핀 라인
설치 방법:乐乐고 구축
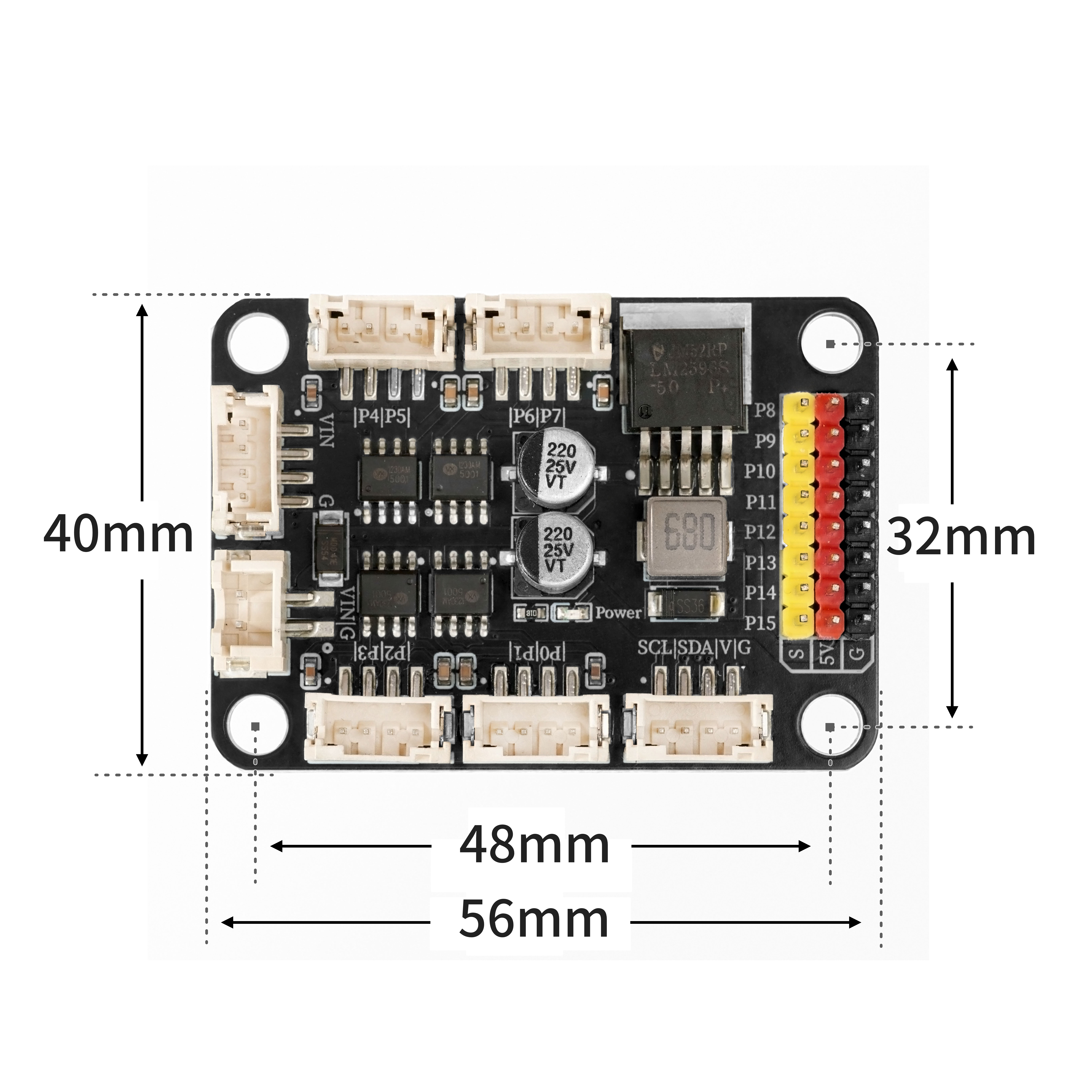
4、회로판 크기
5、Arduino 라이브러리 추가
Arduino 환경 라이브러리 설치 단계:참고 링크
Arduino 환경 라이브러리: 클릭하여 다운로드
미스키 UNO 개발판 라이브러리 설치 단계(코드 사용 전 미스키 라이브러리를 다운로드하고 설치하세요):참고 링크
6、한국어로 MicroPython 환경 라이브러리 파일 추가
미스키 ESP32 개발 보드 라이브러리 파일 다운로드 및 설치 단계(코드 사용 전 먼저 미스키 라이브러리 파일을 다운로드 및 설치하세요):참고 링크
7、아두이노 IDE 예제 프로그램
예제 프로그램(UNO 개발보드):다운로드 클릭
#include "Wire.h"
#include "Adafruit_PWMServoDriver.h"
Adafruit_PWMServoDriver PWM = Adafruit_PWMServoDriver(0x40);
void setup(){
PWM.begin();
PWM.setPWMFreq(85);
}
void loop(){
PWM.setPWM(0,0,0);
PWM.setPWM(1,0,2048);
PWM.setPWM(2,0,0);
PWM.setPWM(3,0,2048);
PWM.setPWM(4,0,0);
PWM.setPWM(5,0,2048);
PWM.setPWM(6,0,0);
PWM.setPWM(7,0,2048);
for (int i = 0; i <= 180; i = i + (1)) {
PWM.setPWM(8,0,(map(i, 0, 180, 140, 680)));
PWM.setPWM(9,0,(map(i, 0, 180, 140, 680)));
PWM.setPWM(10,0,(map(i, 0, 180, 140, 680)));
PWM.setPWM(11,0,(map(i, 0, 180, 140, 680)));
delay(50);
}
}예제 프로그램 (ESP32 개발판):
from machine import I2C, Pin
import time
from mixpy import math_map
PCA9685_MODE1 = 0x00
PCA9685_MODE2 = 0x01
PCA9685_LED0_ON_L = 0x06
PCA9685_LED0_ON_H = 0x07
PCA9685_LED0_OFF_L = 0x08
PCA9685_LED0_OFF_H = 0x09
PCA9685_ALLLED_ON_L = 0xFA
PCA9685_ALLLED_ON_H = 0xFB
PCA9685_ALLLED_OFF_L = 0xFC
PCA9685_ALLLED_OFF_H = 0xFD
PCA9685_PRESCALE = 0xFE
MODE1_ALLCAL = 0x01
MODE1_SUB3 = 0x02
MODE1_SUB2 = 0x04
MODE1_SUB1 = 0x08
MODE1_SLEEP = 0x10
MODE1_AI = 0x20
MODE1_EXTCLK = 0x40
MODE1_RESTART = 0x80
MODE2_OUTNE_0 = 0x01
MODE2_OUTNE_1 = 0x02
MODE2_OUTDRV = 0x04
MODE2_OCH = 0x08
MODE2_INVRT = 0x10
PCA9685_I2C_ADDRESS = 0x40
FREQUENCY_OSCILLATOR_HZ = 25_000_000
PRESCALE_MIN = 3
PRESCALE_MAX = 255
class PCA9685:
def __init__(self, i2c: I2C, addr: int = PCA9685_I2C_ADDRESS):
self.i2c = i2c
self.addr = addr
self._oscillator_freq = FREQUENCY_OSCILLATOR_HZ
def _write8(self, reg: int, val: int):
self.i2c.writeto_mem(self.addr, reg, bytes([val & 0xFF]))
def _read8(self, reg: int) -> int:
return self.i2c.readfrom_mem(self.addr, reg, 1)[0]
def _write4(self, base_reg: int, on: int, off: int):
buf = bytearray(4)
buf[0] = on & 0xFF
buf[1] = (on >> 8) & 0x0F
buf[2] = off & 0xFF
buf[3] = (off >> 8) & 0x0F
self.i2c.writeto_mem(self.addr, base_reg, buf)
def begin(self):
self.reset()
mode1 = self._read8(PCA9685_MODE1)
self._write8(PCA9685_MODE1, mode1 | MODE1_AI)
self.set_output_mode(True)
def reset(self):
self._write8(PCA9685_MODE1, MODE1_RESTART) # 写 RESTART
time.sleep_ms(10)
def sleep(self):
m1 = self._read8(PCA9685_MODE1)
self._write8(PCA9685_MODE1, m1 | MODE1_SLEEP)
time.sleep_ms(5)
def wakeup(self):
m1 = self._read8(PCA9685_MODE1)
self._write8(PCA9685_MODE1, m1 & (~MODE1_SLEEP))
time.sleep_ms(5)
def set_output_mode(self, totempole: bool = True):
m2 = self._read8(PCA9685_MODE2)
if totempole:
m2 |= MODE2_OUTDRV
else:
m2 &= ~MODE2_OUTDRV
self._write8(PCA9685_MODE2, m2)
def set_oscillator_frequency(self, freq_hz: int):
self._oscillator_freq = int(freq_hz)
def get_oscillator_frequency(self) -> int:
return self._oscillator_freq
def set_pwm_freq(self, freq_hz: float):
if freq_hz < 1.0:
freq_hz = 1.0
if freq_hz > 3500.0:
freq_hz = 3500.0
prescaleval = ((self._oscillator_freq / (freq_hz * 4096.0)) + 0.5) - 1.0
if prescaleval < PRESCALE_MIN:
prescaleval = PRESCALE_MIN
if prescaleval > PRESCALE_MAX:
prescaleval = PRESCALE_MAX
prescale = int(prescaleval)
oldmode = self._read8(PCA9685_MODE1)
newmode = (oldmode & ~MODE1_RESTART) | MODE1_SLEEP
self._write8(PCA9685_MODE1, newmode)
self._write8(PCA9685_PRESCALE, prescale)
self._write8(PCA9685_MODE1, oldmode)
time.sleep_ms(5)
self._write8(PCA9685_MODE1, oldmode | MODE1_RESTART | MODE1_AI)
def read_prescale(self) -> int:
return self._read8(PCA9685_PRESCALE)
def set_pwm(self, ch: int, on: int, off: int):
base = PCA9685_LED0_ON_L + 4 * ch
self._write4(base, on & 0x1FFF, off & 0x1FFF)
def set_pin(self, ch: int, val: int, invert: bool = False):
if val < 0:
val = 0
if val > 4095:
val = 4095
if invert:
if val == 0:
self.set_pwm(ch, 4096, 0) # fully ON
elif val == 4095:
self.set_pwm(ch, 0, 4096) # fully OFF
else:
self.set_pwm(ch, 0, 4095 - val)
else:
if val == 4095:
self.set_pwm(ch, 4096, 0) # fully ON
elif val == 0:
self.set_pwm(ch, 0, 4096) # fully OFF
else:
self.set_pwm(ch, 0, val)
def write_microseconds(self, ch: int, us: int):
prescale = self.read_prescale() + 1
us_per_bit = (1_000_000.0 * prescale) / float(self._oscillator_freq)
ticks = int(us / us_per_bit + 0.5)
if ticks < 0:
ticks = 0
if ticks > 4095:
ticks = 4095
self.set_pwm(ch, 0, ticks)
i2c = I2C(0, scl=Pin(22), sda=Pin(21), freq=400000)
PWM = PCA9685(i2c, addr=0x40)
PWM.begin()
PWM.set_pwm_freq(50)
while True:
PWM.set_pwm(0,1,4095)
PWM.set_pwm(1,1,2000)
PWM.set_pwm(2,1,4095)
PWM.set_pwm(3,1,2000)
PWM.set_pwm(4,1,4095)
PWM.set_pwm(5,1,2000)
PWM.set_pwm(6,1,4095)
PWM.set_pwm(7,1,2000)
PWM.set_pwm(8, 0, int(math_map(90, 0, 180, 140, 680)))
time.sleep(5)
PWM.set_pwm(0,1,2000)
PWM.set_pwm(1,1,2000)
PWM.set_pwm(2,1,2000)
PWM.set_pwm(3,1,2000)
PWM.set_pwm(4,1,2000)
PWM.set_pwm(5,1,2000)
PWM.set_pwm(6,1,2000)
PWM.set_pwm(7,1,2000)
PWM.set_pwm(8, 0, int(math_map(0, 0, 180, 140, 680)))
time.sleep(5)
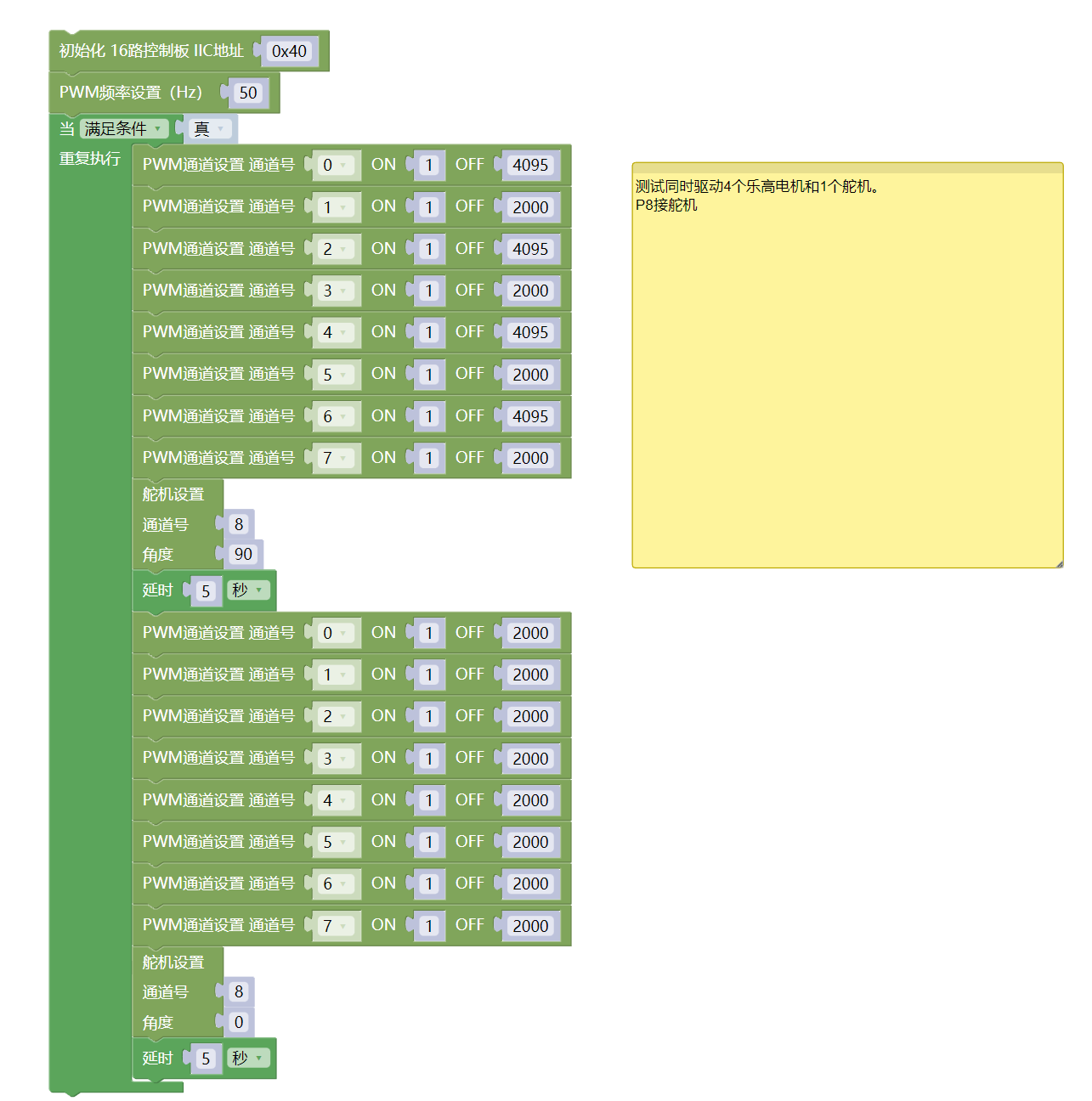
8、미스키 Mixly 예제 프로그램(그래픽 언어)
예제 프로그램(UNO 개발판):다운로드 클릭
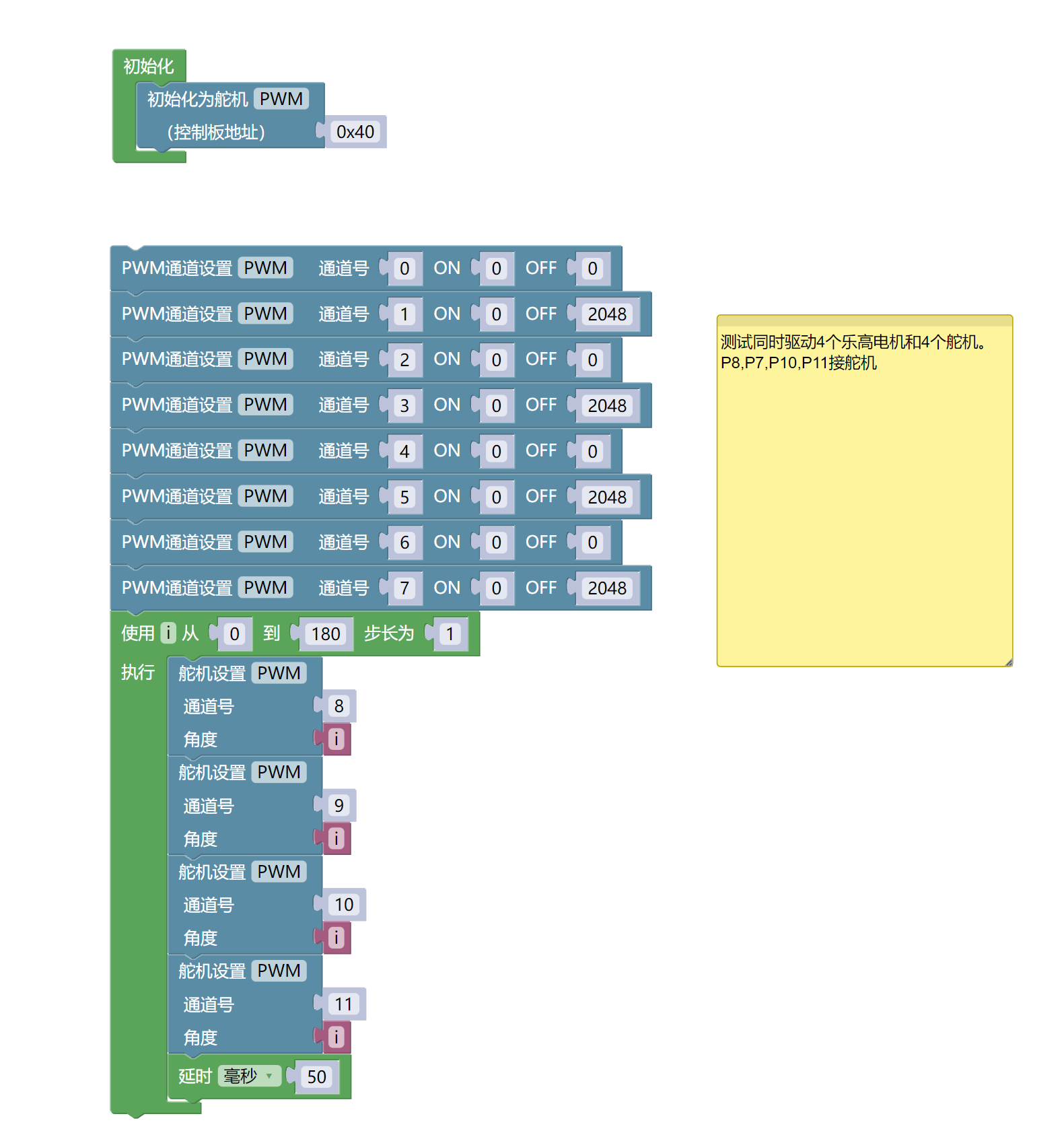
예제 프로그램(ESP32 개발 보드):다운로드 클릭
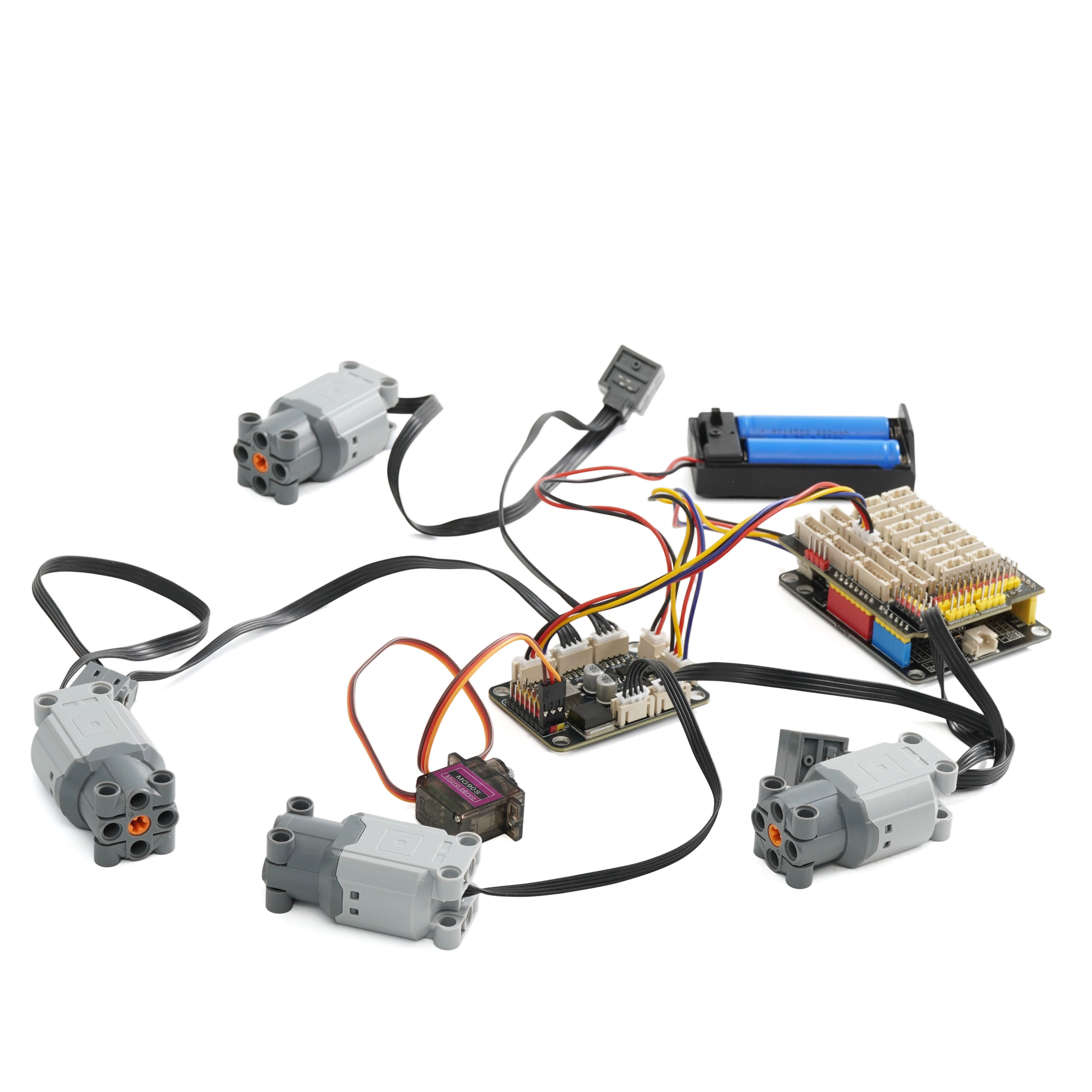
9、테스트 환경 구축
Arduino UNO 테스트 환경 구축
부품 준비:“
UNO-R3 개발 보드 *1
UNO-R3 EXP 확장판 *1
USB type-c 데이터 케이블 *1
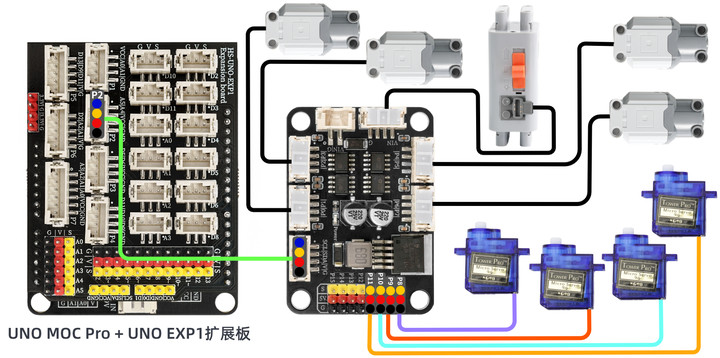
HS-F27 4로 전기 모터 8로 서보 모터 확장 보드*1
PH2.0 4P둘쪽 머리 끝 케이블 *1
6-9V 배터리 상자*1
레고 전기 모터*4
서보 모터*4
전기 연결도):
ESP32 Python 테스트 환경 구축
10、비디오 강의
Arduino UNO 비디오 강의:시각화 클릭
ESP32 Python 비디오 강의:
11、테스트 결과
Arduino UNO 테스트 결과:
코딩을 내리고, 해당 모듈을 연결한 후, 전원을 켜면 모터와 서보모터가 동시에 회전합니다.