
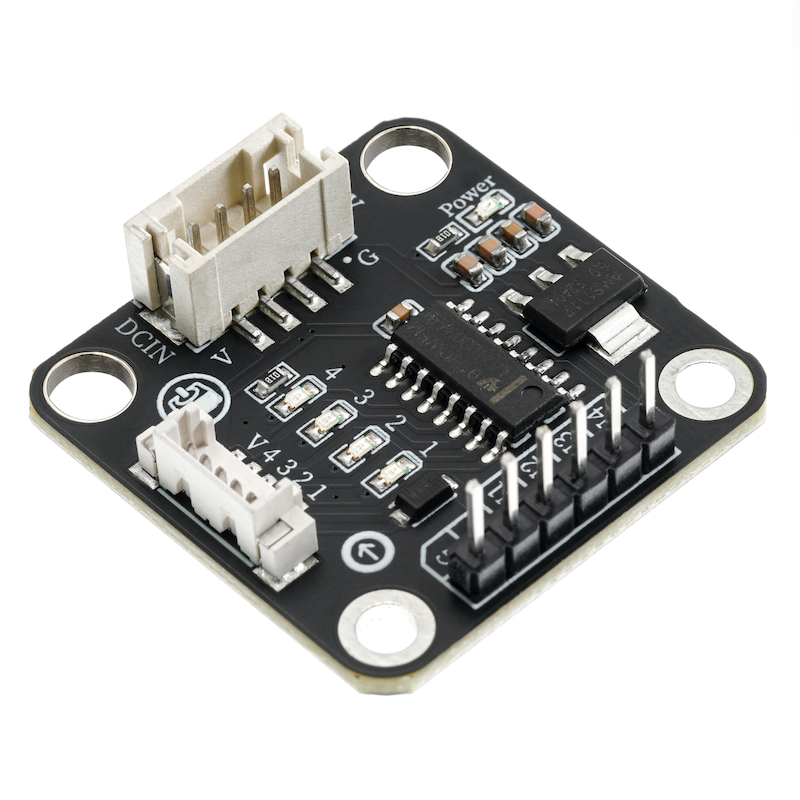
1、소개
이 제품은 ULN2003A가 고전압, 대전류의 다릿론 트랜지스터 배열이며, 종종 전기 기관, LED 램프, 전기 밸브, 스타터 모터 등을 드라이브하는 데 사용됩니다.그의 일곱 개의 독립적인 채널은 스텝 모터의 네 개의 상전을 각각 제어할 수 있으며, 각 채널은 최대 500mA의 전류를 견딜 수 있어 소형에서 중형의 스텝 모터를 운동할 수 있습니다。이 드라이버는 ULN2003A를 통해 5선 4상 스텝 모터를 제어합니다.스테퍼 모터를 구동하는 핵심은 전기 전압 순서와 시간을 바꾸어 모터가 회전하는 것입니다.ULN2003A의 각 채널은 스타터 모터의 한 케이블에 해당하며, 이 채널을 열고 닫아서 모터의 스타킹 동작을 제어할 수 있습니다。보통, 스탬프 모터는 네 가지 다른 스탬프 모드가 있습니다: 단상, 이상, 반스탬프 및 전스탬프, 각 모드에서는 모터의 토큰과 정밀도가 다릅니다.
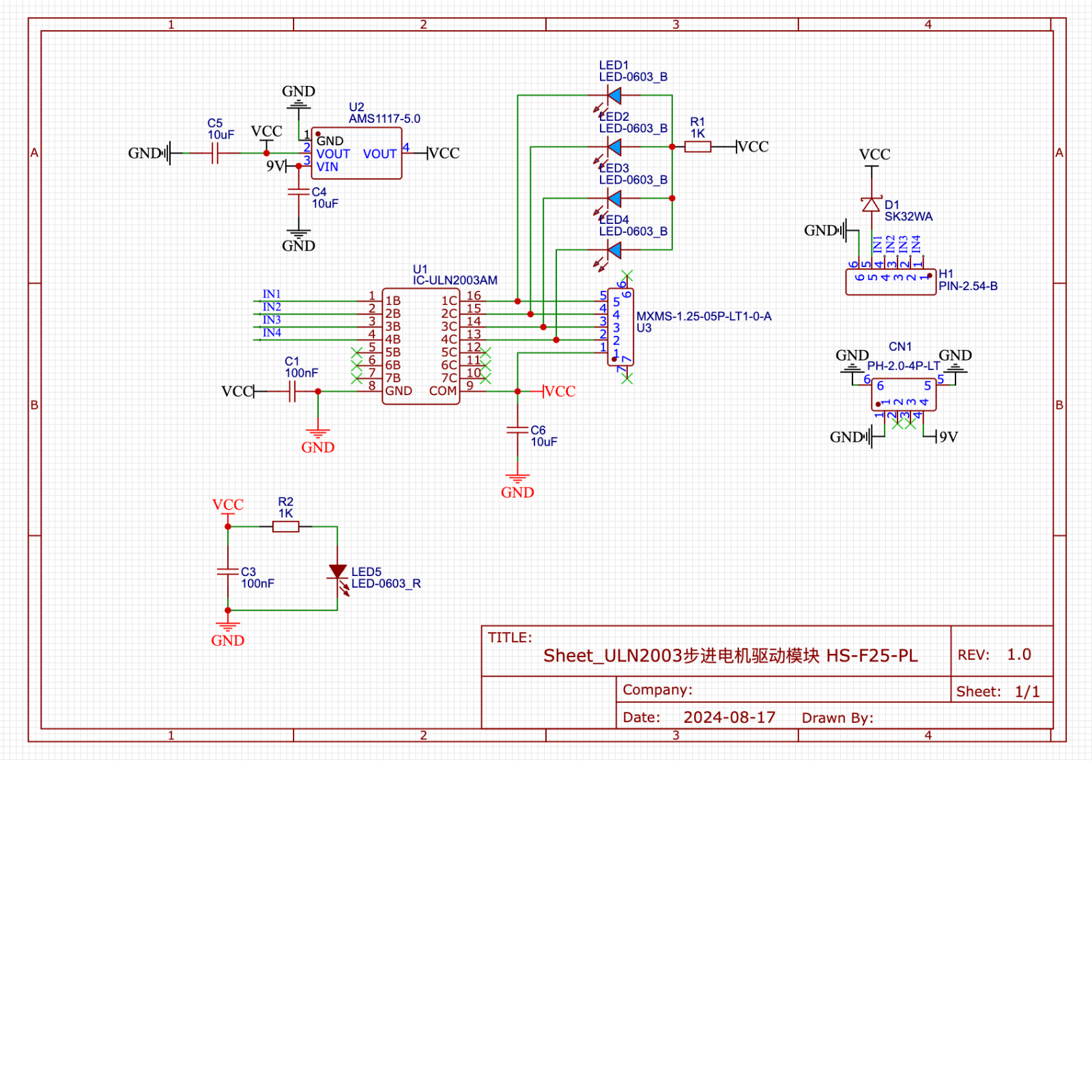
2、시뮬레이션 그래프
3、모듈 매개변수
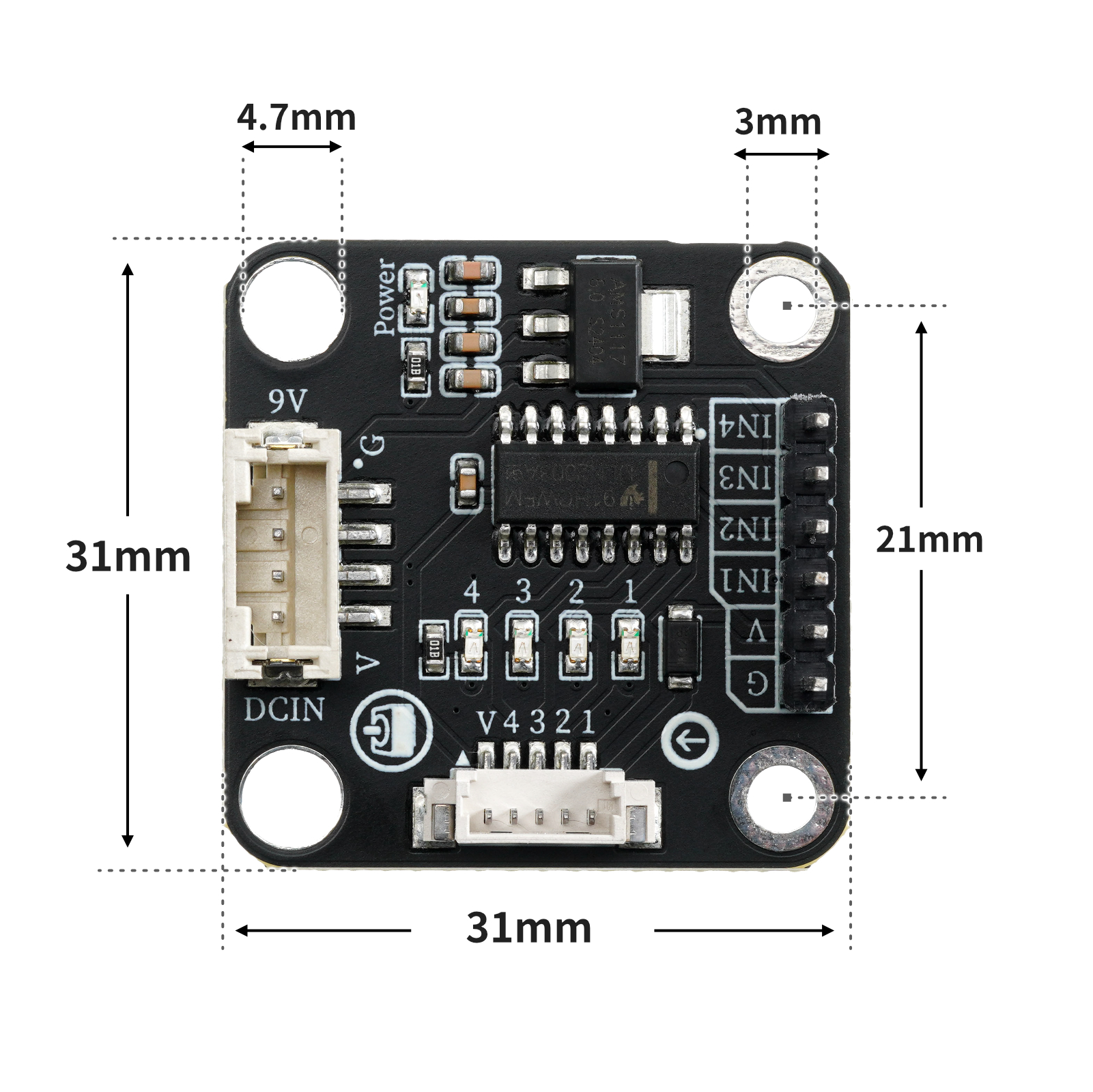
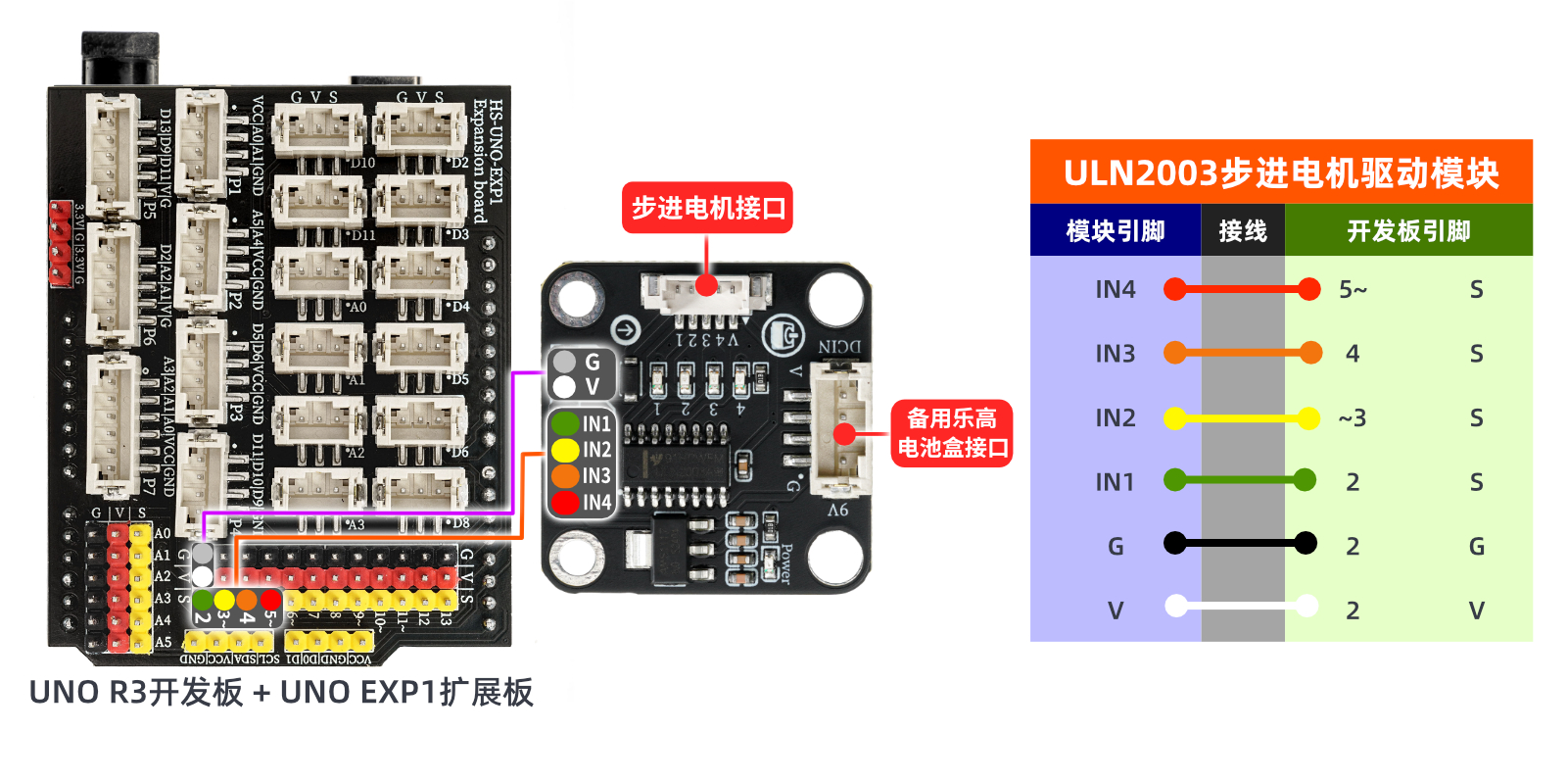
핀 이름 | 설명 |
|---|---|
G | GND(전원 입력 부정极) |
V | VCC(전원 입력 정극) |
IN1 | 모터 신호 핀 1 |
IN2 | 모터 신호 핀 2 |
IN3 | 모터 신호 접점 3 |
IN4 | 모터 신호 접점 4 |
전원 전압: 5V
전원 신호 연결 방식: 6P 도邦선
스템프 모터 연결 방식: PH1.5-4P 콘ector
설치 방법: 볼트 고정/레고 구축
4、회로판 크기
5、Arduino 라이브러리 추가
라이브러리를 사용하지 못하는 참고 여기:라이브러리 설치 사용 방법
라이브러리 다운로드:다운로드 클릭
6、아두이노 IDE 예제 프로그램
예제 프로그램(UNO 개발판):다운로드 클릭
#include <Stepper.h>
Stepper mystepper(2048,2,3,4,5);
void setup(){
mystepper.setSpeed(10);
}
void loop(){
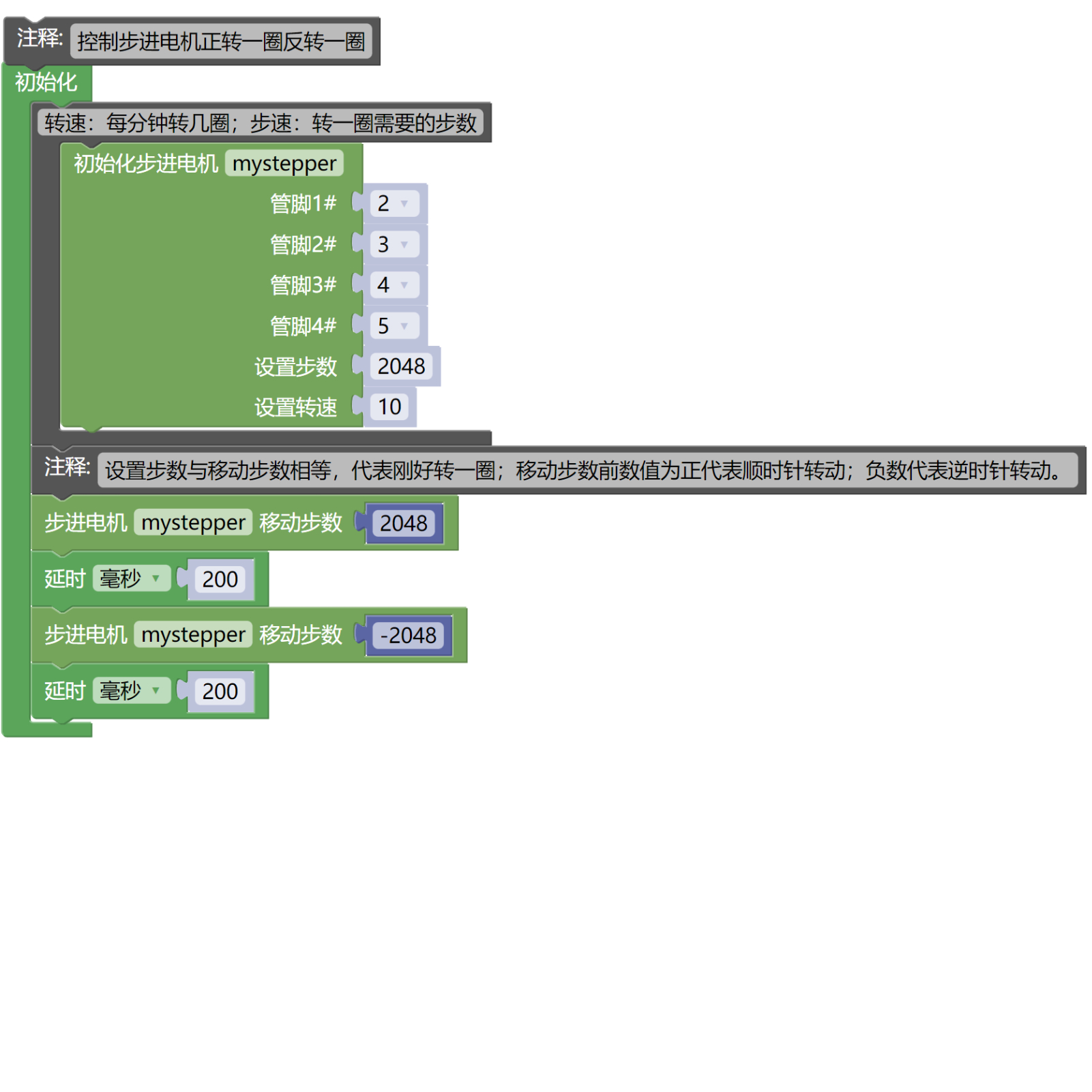
//控制步进电机正转一圈反转一圈
//设置步数与移动步数相等,代表刚好转一圈;移动步数前数值为正代表顺时针转动;负数代表逆时针转动。
mystepper.step(2048);
delay(200);
mystepper.step((-2048));
delay(200);
}예제 프로그램(ESP32 보드—Python 언어 기반, Arduino IDE로 업로드할 수 없음):
7、미스키 Mixly 예제 프로그램(그래픽 언어)
예제 프로그램(UNO 개발판):다운로드 클릭
예제 프로그램(ESP32 개발판):다운로드 클릭
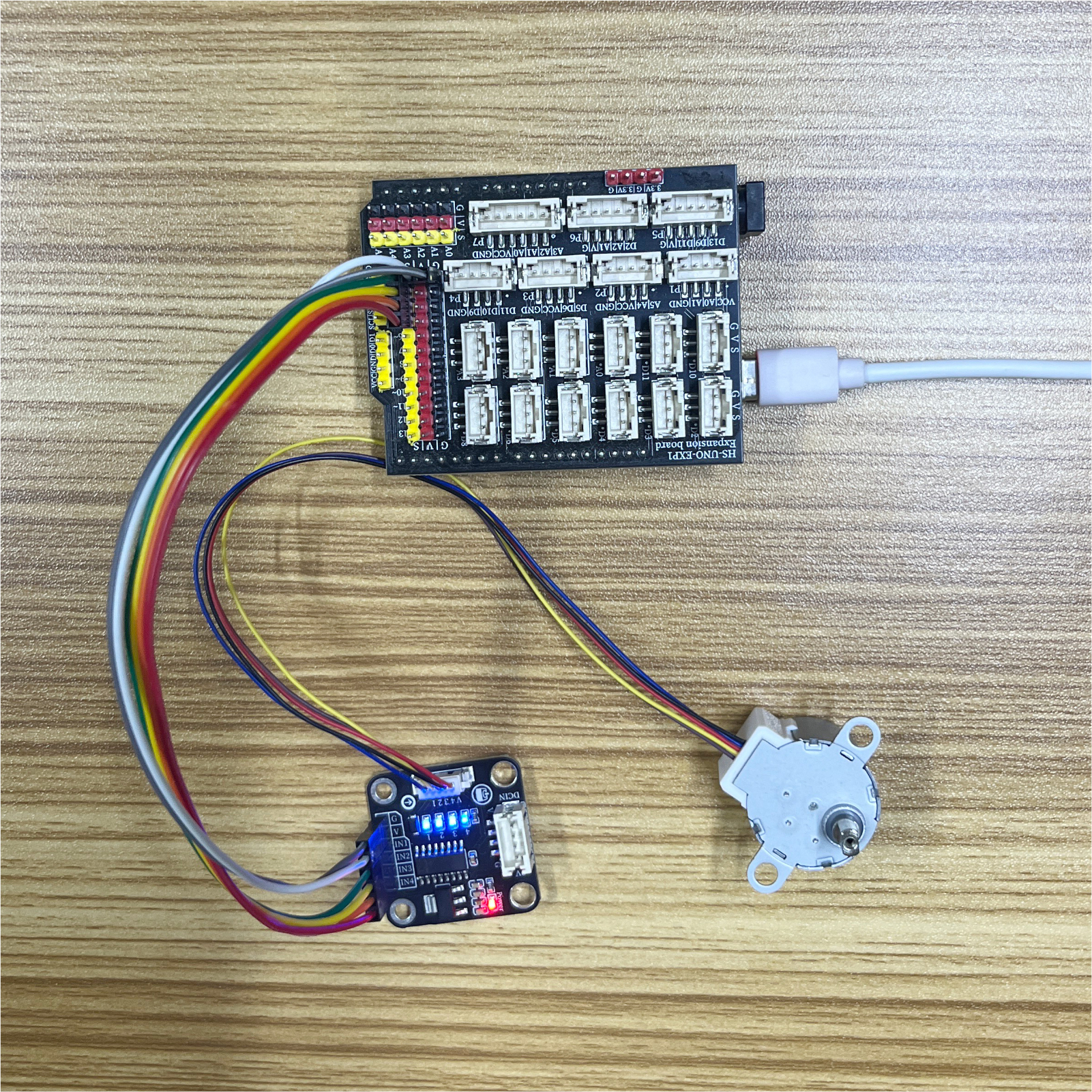
8、테스트 환경 구축
Arduino UNO 테스트 환경 구축
부품 준비:“
UNO-R3 개발 보드 *1
UNO-R3 P 확장판 *1
USB type-c 데이터 케이블 *1
스템프 모터 드라이버 모듈(HS-F25-PL)*1
6P杜邦선*1
PH1.5-4P선
전기 연결도):
ESP32 Python 테스트 환경 구축
9、비디오 강의
Arduino UNO 비디오 강의:시각화 클릭
ESP32 Python 비디오 강의:
10, 테스트 결과
Arduino UNO 테스트 결과:
프로그램을 기록한 후, 모터가 한 바퀴 정전으로 돌고, 약간 멈춘 후 다시 한 바퀴 역전으로 돌 수 있습니다.