

1、소개
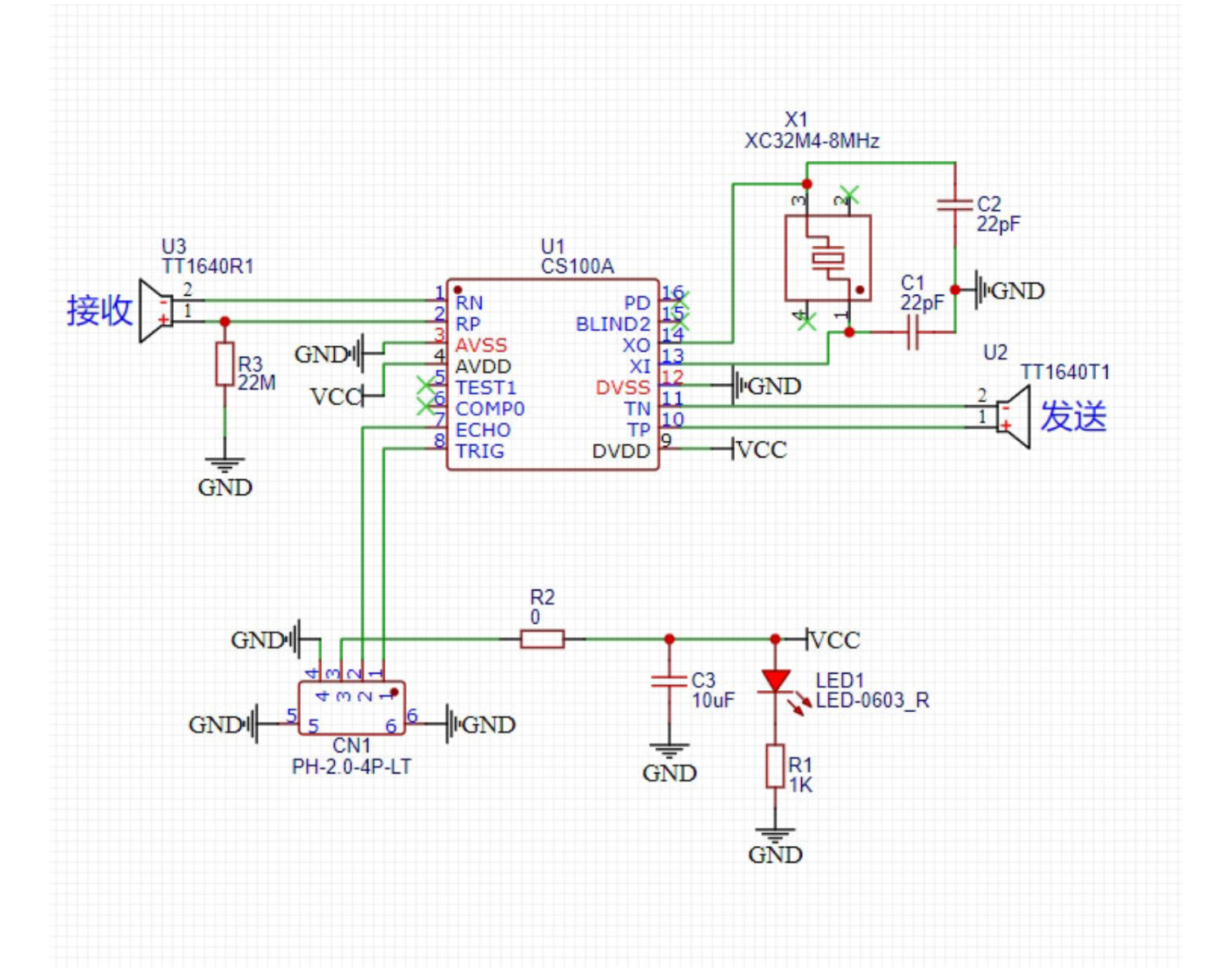
2、시뮬레이션 그래프
3、모듈 매개변수
핀 이름 | 설명 |
|---|---|
TRIG | 제어 단 |
ECHO | 수신 단 |
VCC | VCC(전원 입력 정극) |
GND | GND(전원 입력 부정极) |
전원전압: 3.3V / 5V
연결방식: PH2.0 케이블접속
설치 방법: 볼트 고정/레고 구축
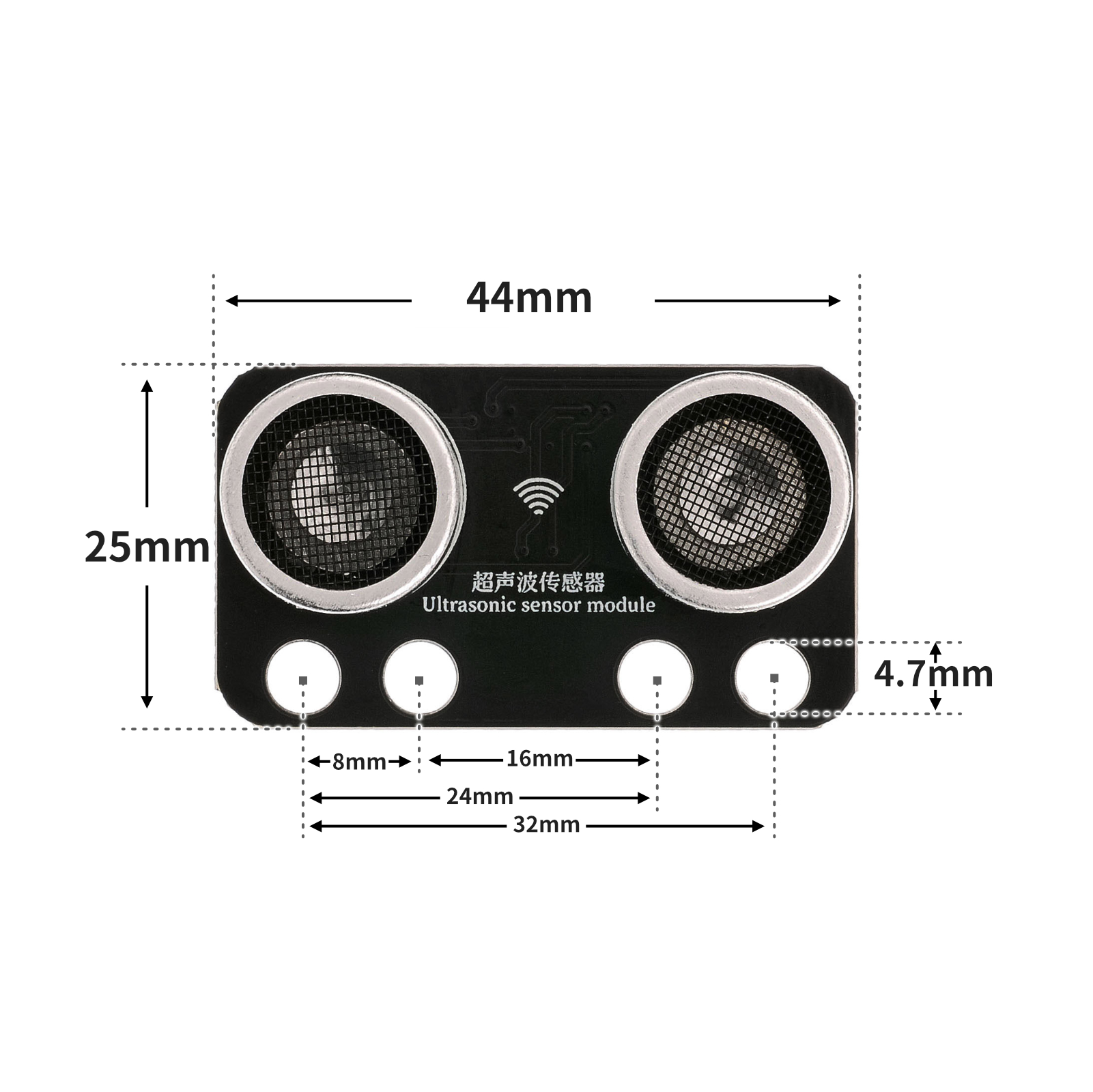
4、회로판 크기
5、아두이노 IDE 예제 프로그램
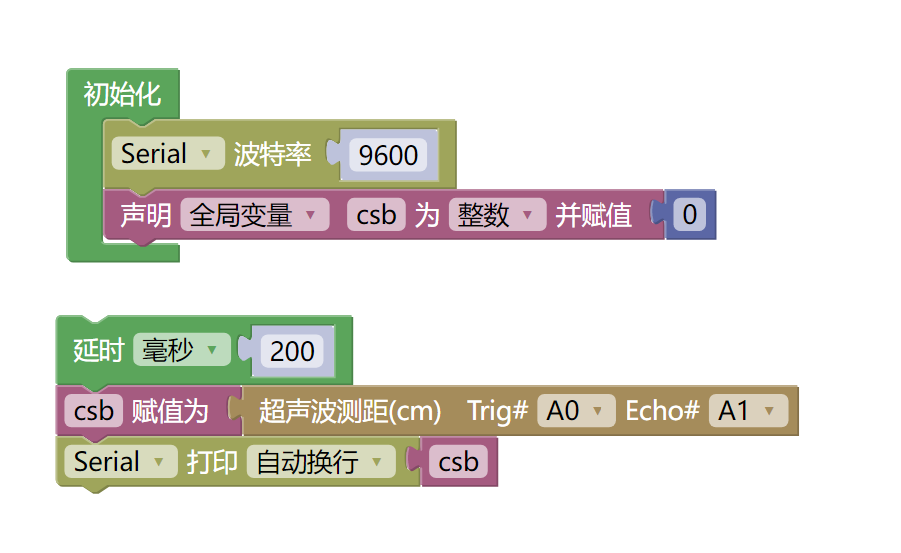
Arduino UNO 그래픽 예제 프로그램:
volatile int csb;
float checkdistance_A0_A1() {
digitalWrite(A0, LOW);
delayMicroseconds(2);
digitalWrite(A0, HIGH);
delayMicroseconds(10);
digitalWrite(A0, LOW);
float distance = pulseIn(A1, HIGH) / 58.00;
delay(10);
return distance;
}
void setup(){
Serial.begin(9600);
csb = 0;
pinMode(A0, OUTPUT);
pinMode(A1, INPUT);
}
void loop(){
delay(200);
csb = checkdistance_A0_A1();
Serial.println(csb);
}ESP32 Python 예제(Mixly IDE / 미스키에 적용됨)
(개발 보드를 선택한 Python ESP32 【ESP32 Generic(4MB)】를 코드 모드로 전환하여 업로드 ):
import machine
import sonar
import time
while True:
print(sonar.Sonar(16,17).checkdist())
time.sleep_ms(200)6、미시치 Mixly 예제 프로그램(그래픽 언어)
Arduino UNO 그래픽 예제 프로그램:다운로드 클릭
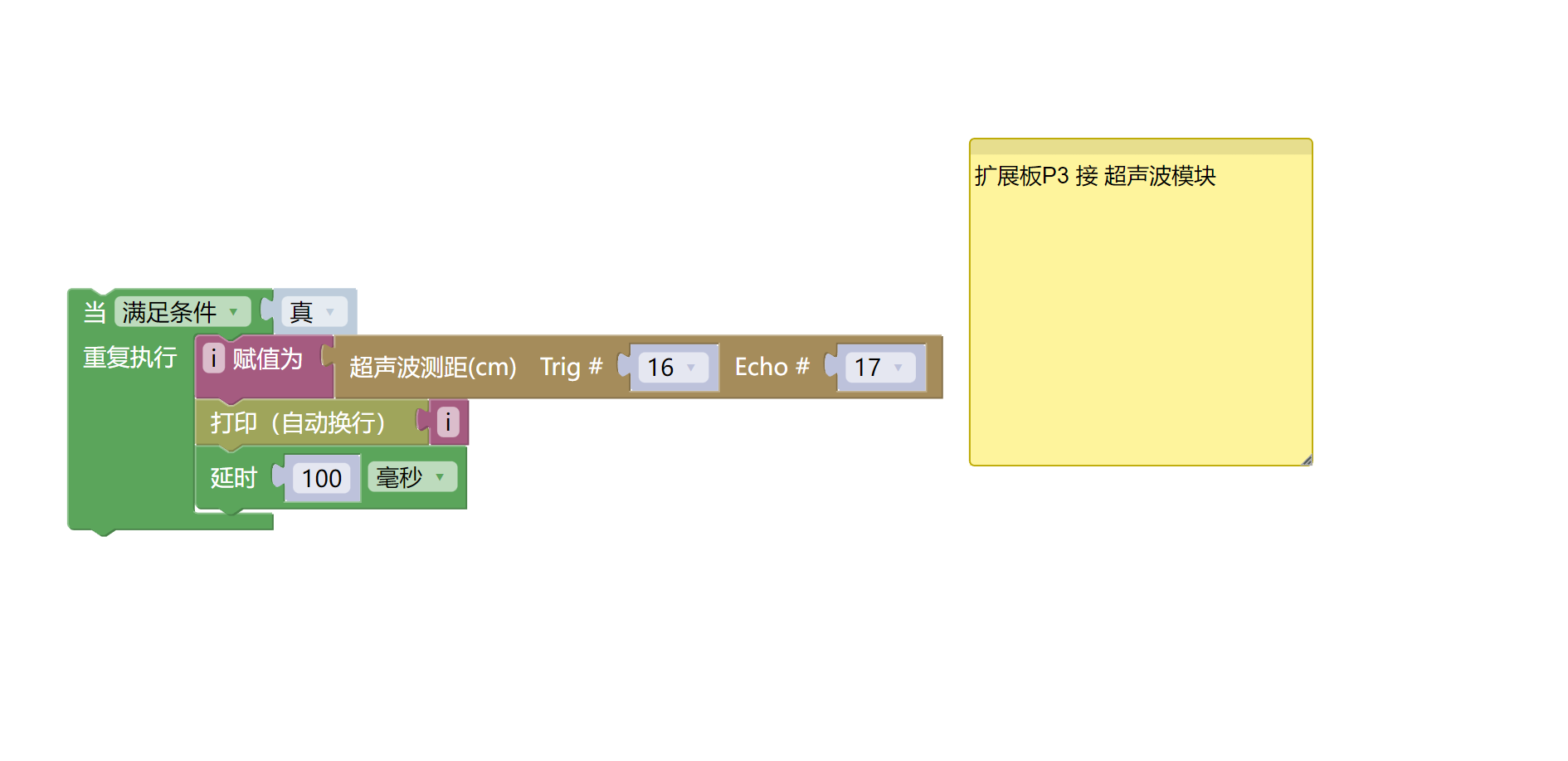
ESP32 Python 그래픽 예제 프로그램:다운로드 클릭
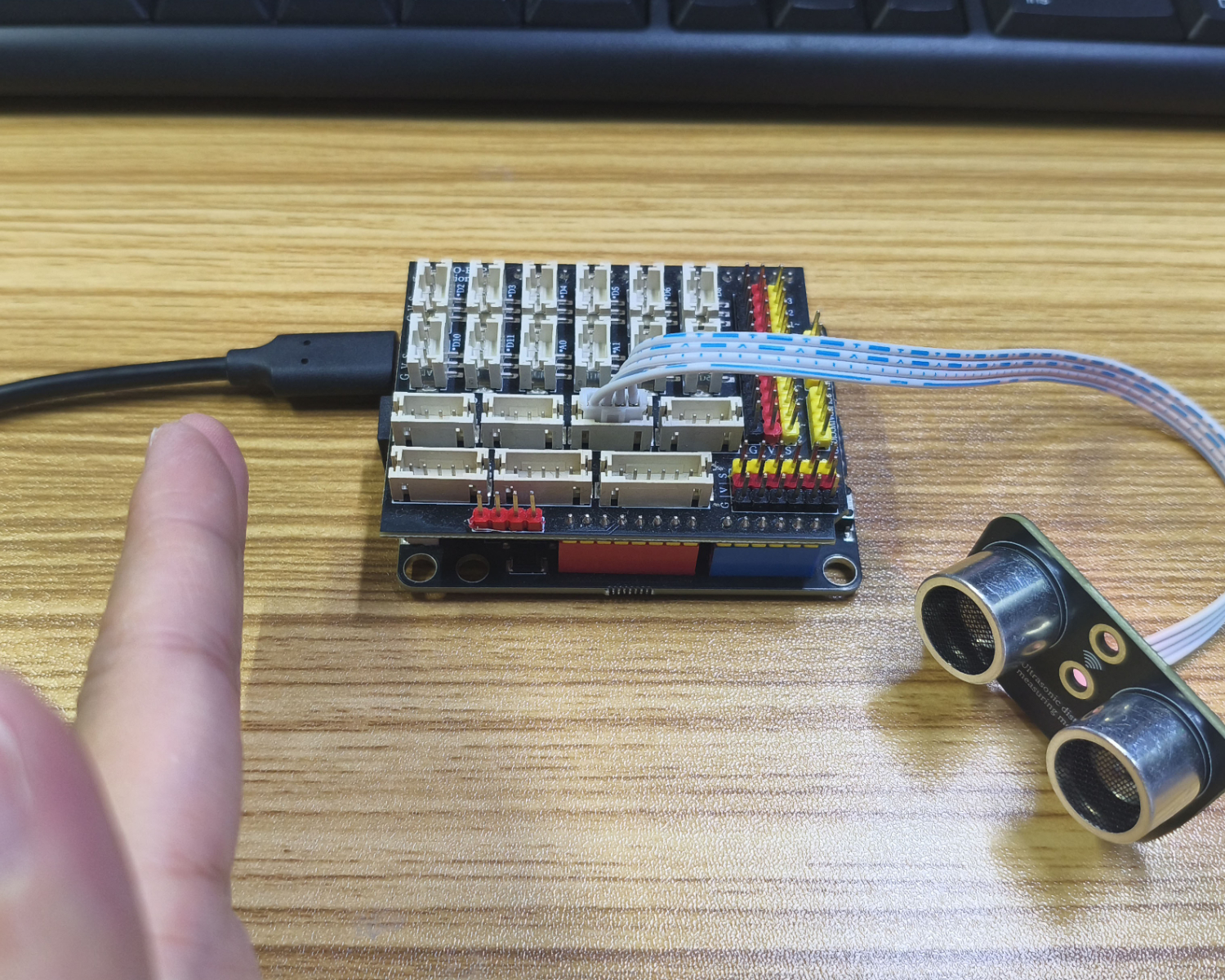
7、테스트 환경 구축
Arduino UNO 테스트 환경 구축
부품 준비:“
HELLO STEM UNO R3 개발 보드 *1
HELLO STEM UNO R3 P 확장 보드 *1
USB type-c 데이터 케이블 *1
超음파 모듈(HS-SR04A-L)*1
PH2.0 4P둘쪽 머리 끝 케이블 *1
전기 연결도):
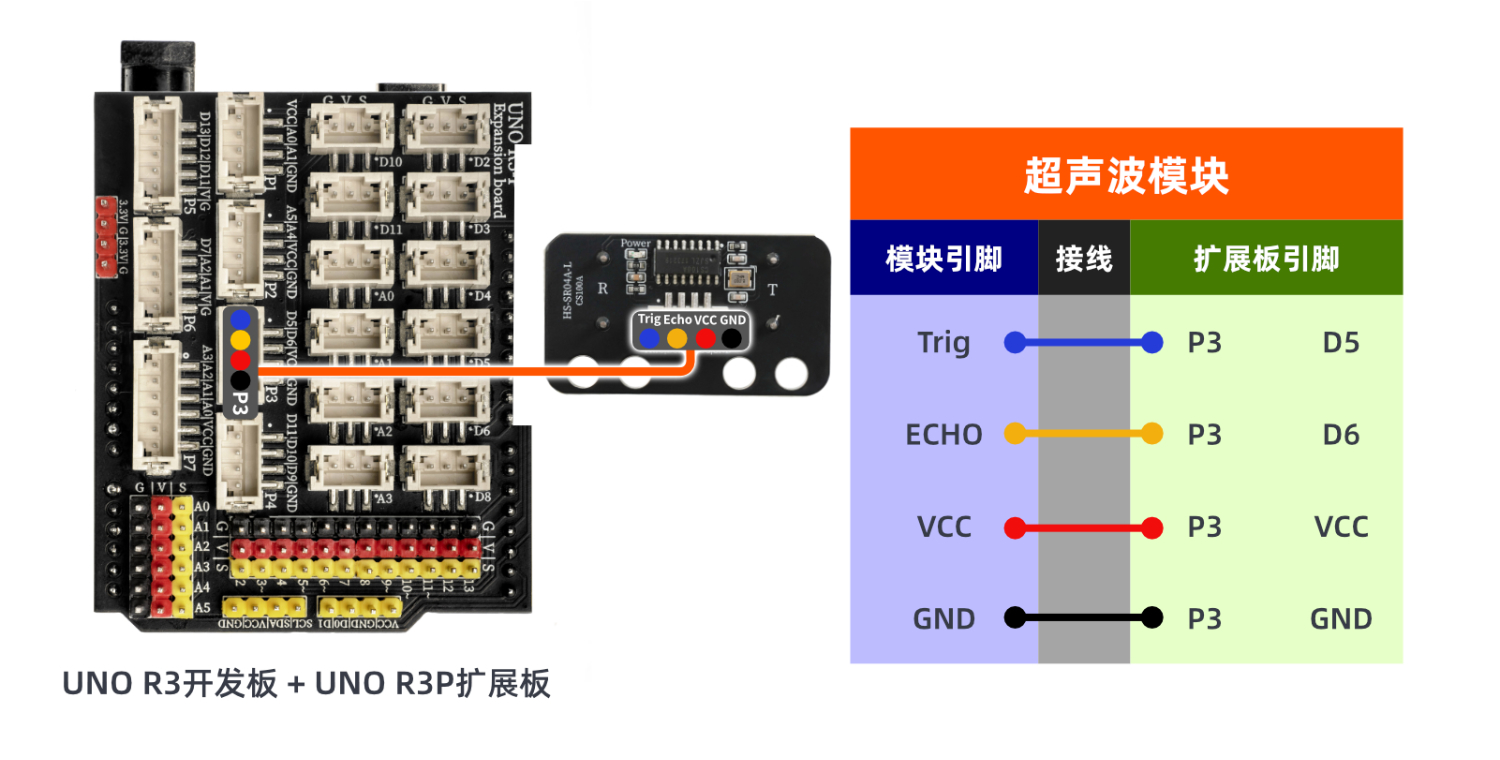
ESP32 Python 테스트 환경 구축
8、비디오教程
Arduino UNO비디오 강의:点击查看
ESP32 Python 비디오 강의:
9、테스트결론
Arduino UNO 테스트 결과:

선을 연결한 장치를, 위의 프로그램을 Arduino UNO 개발 보드에 기록한 후, 시리얼 모니터를 열고,波特率为 9600으로 설정합니다。우ltrasonic 모듈 앞에 장애물을 두고, ultrasonic 모듈과 장애물 간의 거리(cm)를 측정할 수 있습니다。거리를 변경하면 장애물과 초음파 모듈 사이의 거리가 변경되고, 시리얼 포트에 표시된 거리 값이 변경됩니다。
ESP32 Python 테스트 결과:장치를 연결한 후, 해당 프로그램을 ESP32 개발보드에 탑재한 후, 시리얼 모니터를 열고,波特率을 9600으로 설정합니다。우리는 장애물을 초음파 모듈 앞에 두고, 초음파 모듈과 장애물 간의 거리(cm)를 측정할 수 있습니다。거리를 변경하면 장애물과 초음파 모듈 간의 거리가 변하며, 시리얼 포트에 표시된 거리 값이 변경됩니다。