

1、介绍
双轴按键摇杆主要由两个10K的电位器和一个按键开关组成,两个电位器随着摇杆扭转角度分别输出X、Y轴上对应的电压值,在Z轴方向上按下摇杆可触发轻触按键。在配套机械结构的作用下,无外力扭动的摇杆初始状态下,两个电位器都处在量程的中间位置。
操纵杆是一种输入设备,由一根在底座上旋转并向其控制的设备报告其角度或方向的杆组成。操纵杆通常用于控制视频游戏,通常有一个或多个按钮,其状态也可以由计算机读取。现代视频游戏机上使用的操纵杆的一种流行变体是模拟操纵杆。操纵杆还用于控制起重机、卡车、水下无人驾驶车辆、轮椅、监控摄像头和零转弯半径割草机等机器。微型手指操作的操纵杆已被用作诸如移动电话之类的小型电子设备的输入设备。
2、原理图
3、模块参数
引脚名称 | 描述 |
|---|---|
G | GND(电源输入负极) |
V | VCC(电源输入正极) |
X | 模拟信号引脚 |
Y | 模拟信号引脚 |
K | 数字信号引脚 |
供电电压:3.3V / 5V
连接方式:PH2.0端子线
安装方式:四螺丝固定
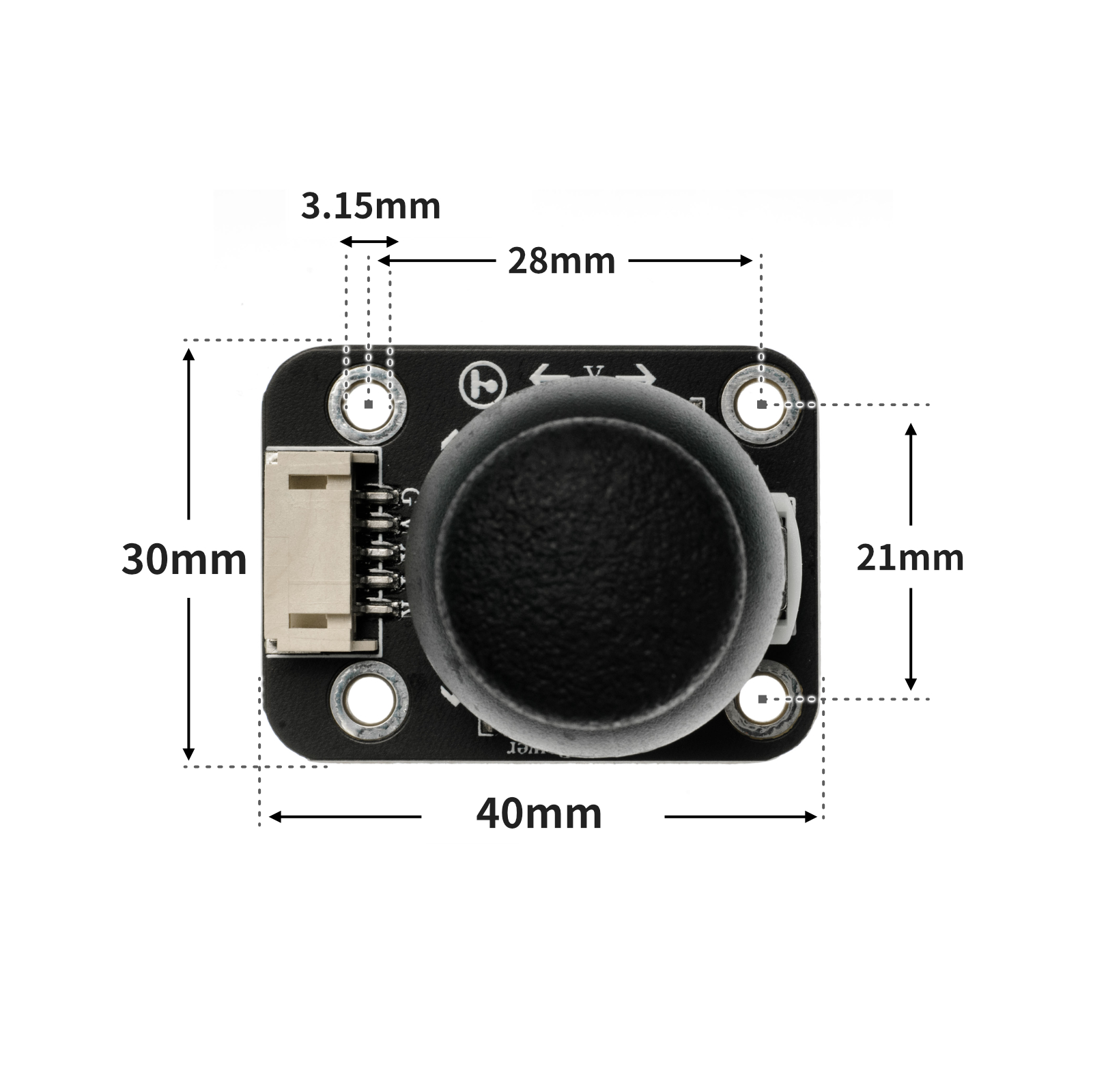
4、电路板尺寸
5、Arduino IDE示例程序
注意:程序上传时如果提示库文件报错,请先导入库文件!
Arduino IDE 库文件下载及导入教程:点击查看
示例程序(UNO开发板):
int limitswitchPin = 4;//设置碰撞开关接D4引脚
int led = 6;//设置led灯接D6引脚
void setup() {
Serial.begin(9600);//设置串口波特率
pinMode(limitswitchPin, INPUT);//设置碰撞开关为输入模式
pinMode(led, OUTPUT);//设置led为输出模式
}
void loop() {
//碰撞开关接uno开发板D4引脚;LED灯模块接D6引脚
if (digitalRead(limitswitchPin) == LOW) {//按下碰撞开关
Serial.println("触发开关,点亮led1秒");
digitalWrite(led, HIGH);//点亮led
delay(1000);//延时1S
} else {
Serial.println("没有触发开关,熄灭led");
digitalWrite(led, LOW);//熄灭led
}
delay(500);
}6、ESP32 Python 示例(适用于Mixly IDE /米思齐)
开发板选择 Python ESP32 【ESP32 Generic(4MB)】切换为代码模式上传
注意:程序上传时如果提示库文件报错,请先导入库文件!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:点击查看
示例程序(ESP32-Python):
import machine
import time
adc35 = machine.ADC(machine.Pin(35))
adc34 = machine.ADC(machine.Pin(34))
pin15 = machine.Pin(15, machine.Pin.IN)
while True:
print('X ',end ="")
print(adc35.read_u16(),end ="")
print('Y ',end ="")
print(adc34.read_u16(),end ="")
print('Z ',end ="")
print(pin15.value())
time.sleep_ms(100)7、米思齐 Mixly 示例程序(图形化语言)
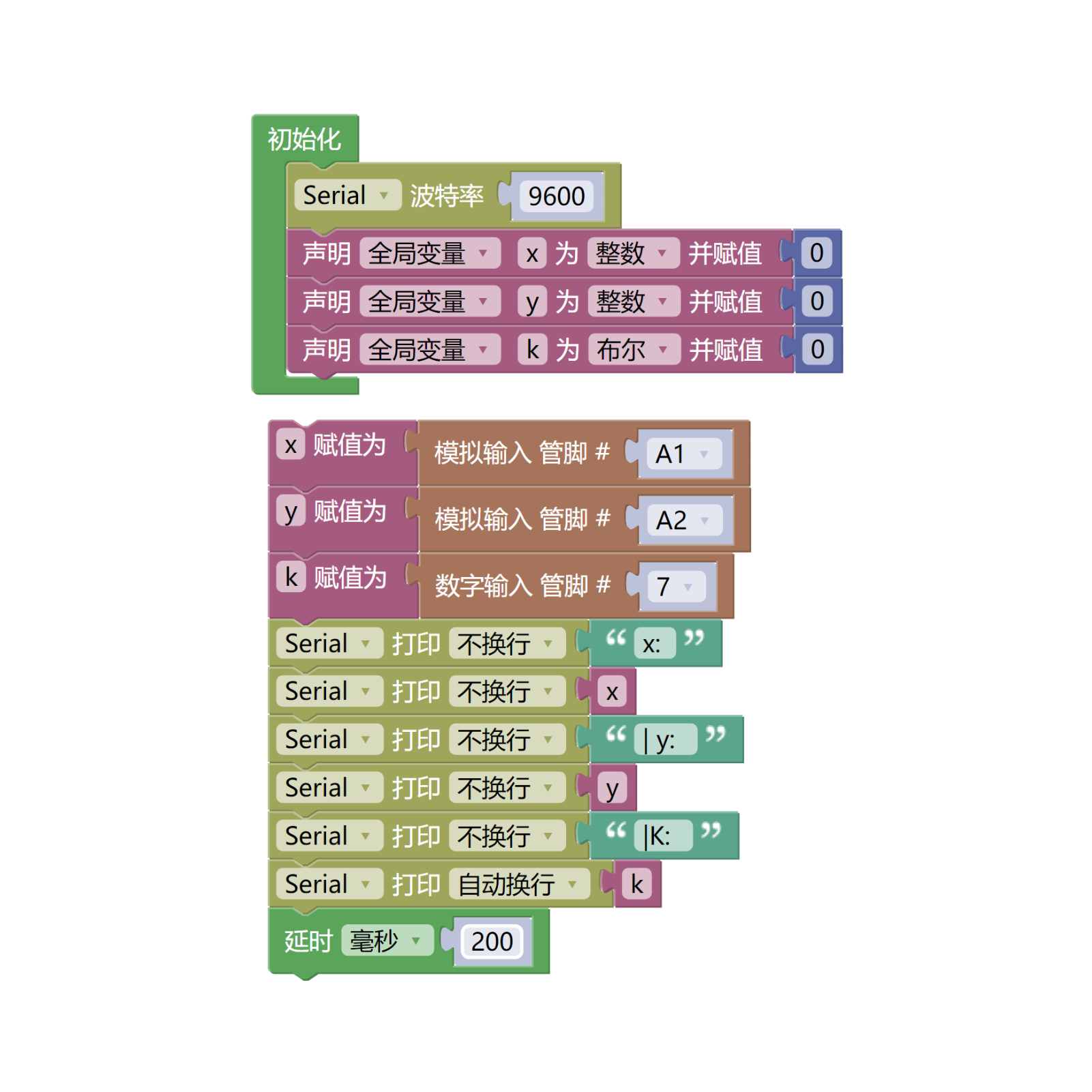
示例程序(UNO开发板):点击下载
注意:程序上传时如果提示库文件报错,请先导入库文件!
米思齐(Mixly)IDE Arduino库文件下载及导入教程:点击查看
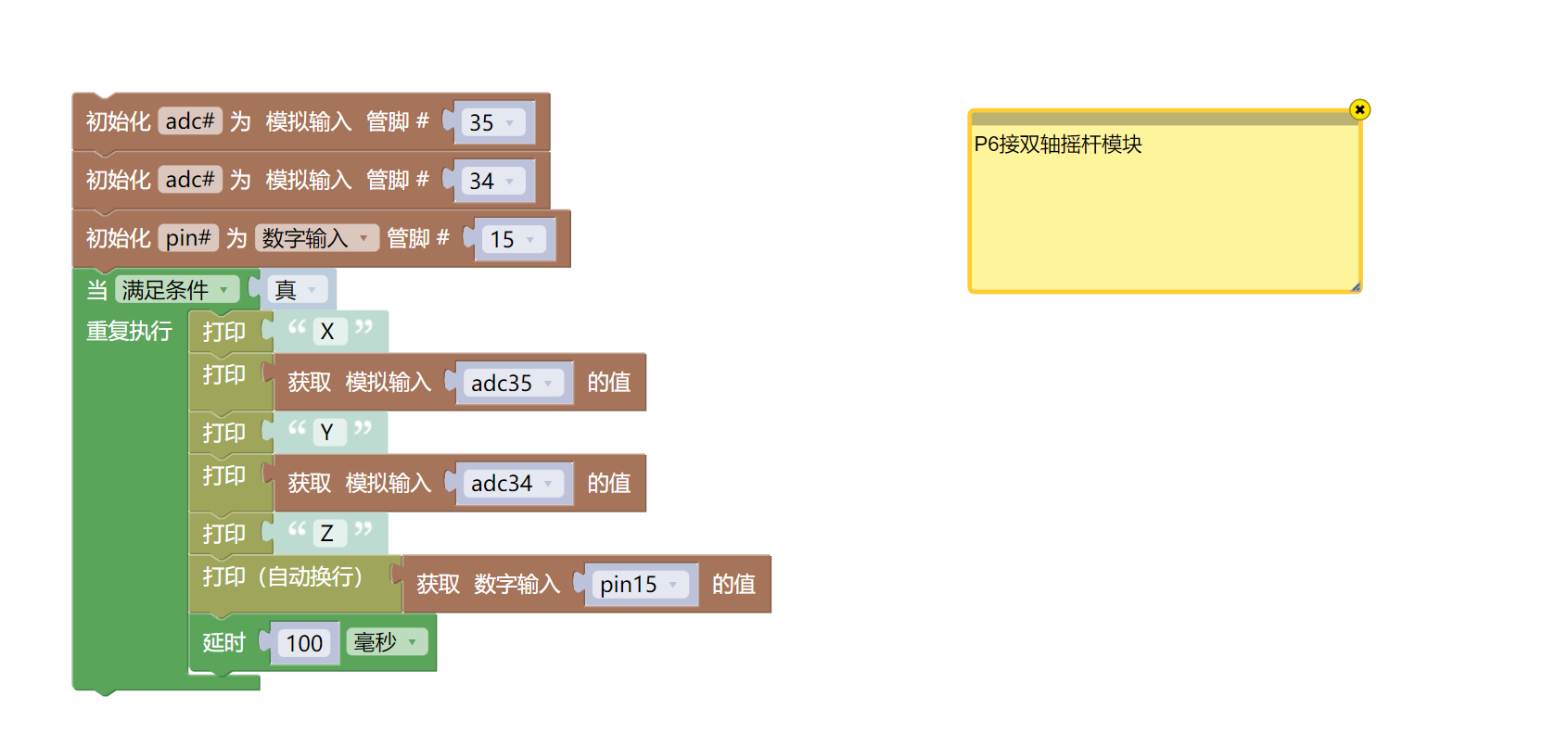
示例程序(ESP32开发板):点击下载
注意:程序上传时如果提示库文件报错,请先导入库文件!
米思齐(Mixly)IDE ESP32库文件下载及导入教程:点击查看
8、测试环境搭建
Arduino UNO 测试环境搭建
准备配件:
HELLO STEM UNO R3 开发板 *1
HELLO STEM UNO R3 P 扩展板 *1
USB type-c 数据线 *1
双轴摇杆模块(HS-S34A)*1
PH2.0 5P端子转杜邦线 *1 或 PH2.0 5P双头端子线 *1
电路接线图:
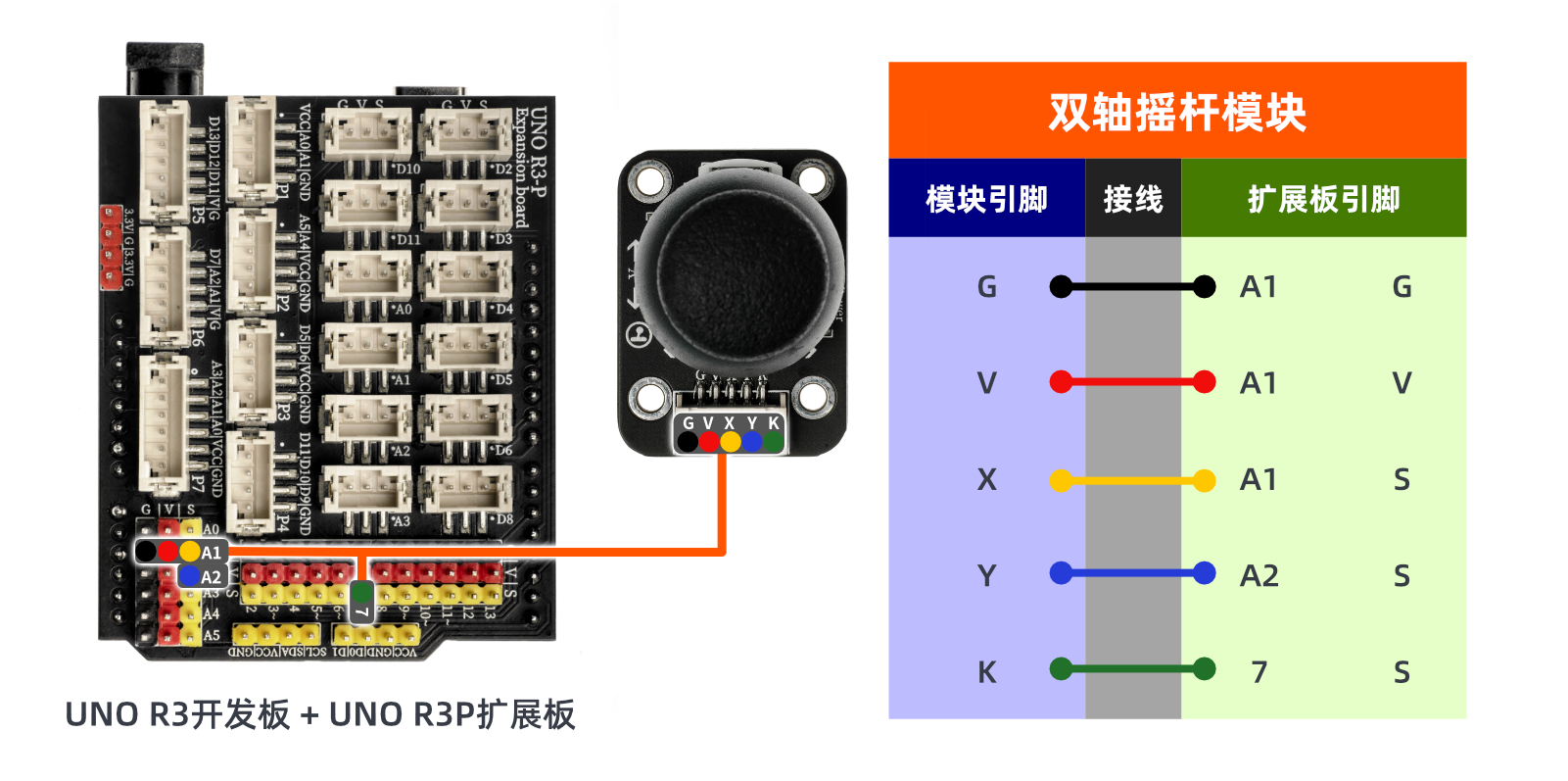
ESP32 测试环境搭建
准备配件:待更新...
电路接线图:待更新...
9、视频教程
视频教程:点击查看
10、测试结果
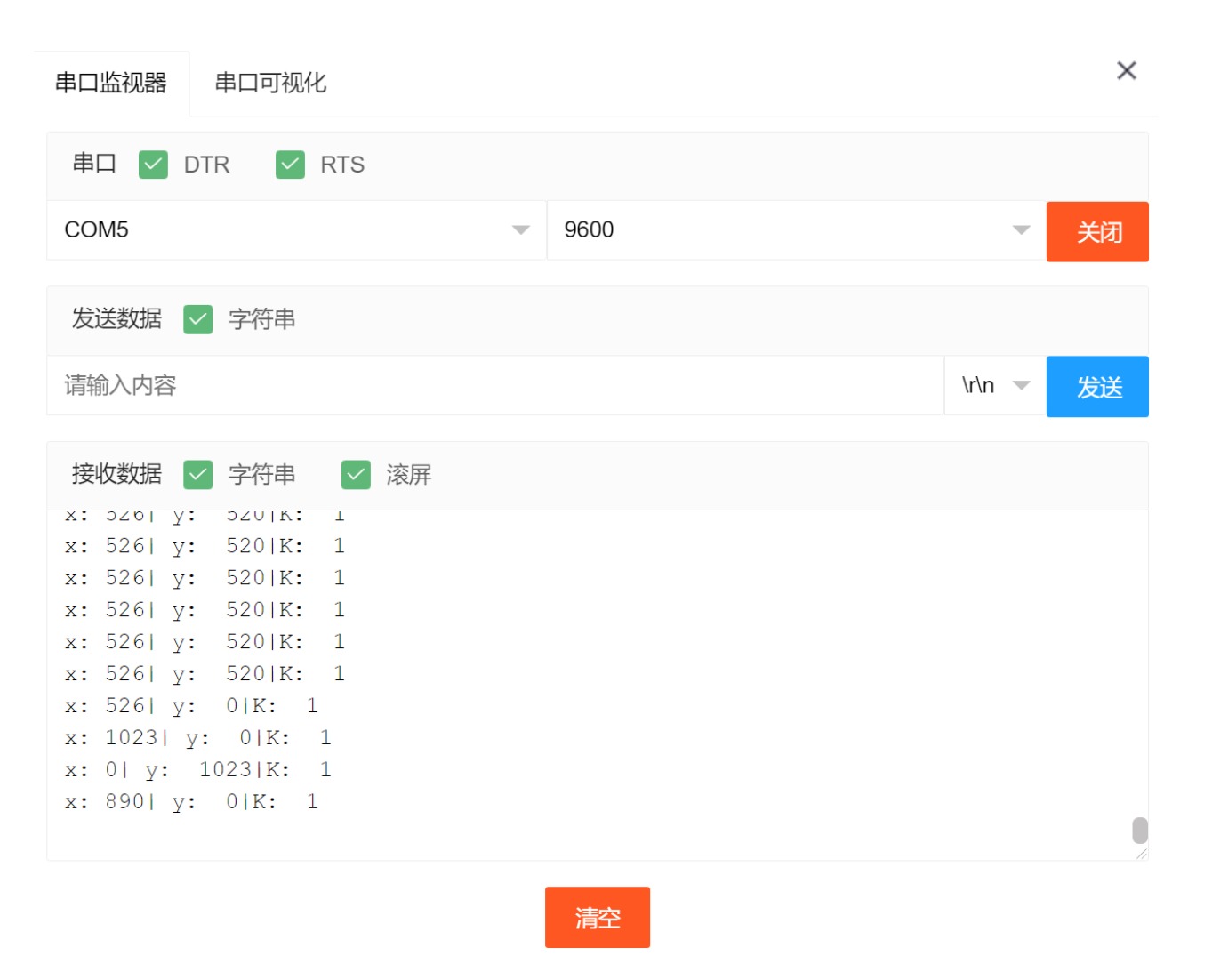
Arduino UNO测试结果:
通过获取上下,左右两个端口的模拟值(0,512,1023)不同组合得到摇杆的方向,输出对应的动作,通过按键的高低电平,获取是否被按下。从串口打印可以看到上下左右的效果,达到目的。
ESP32 测试结果:
待更新...